99469_UR16e_User_Manual_zh_Global.pdf - 第55页
警 告 1. 请 确 保 机 器 人 以 正 确 的 方 式 接 地 ( 电 气 接 地 ) 。 请 使 用 未 用 的 且 与 控 制 箱 内 接 地 标 志 相 连 的 插 销 来 为 系 统 内 的 所 有 设 备 建 立 通 用 接 地 。 接 地 连 接 器 应 至 少 有 该 系 统 内 最 高 电 流 的 额 定 电 流 。 2. 确 保 控 制 箱 的 输 入 电 源 受 到 剩 余 电 流 断 路 器 (R C D) …
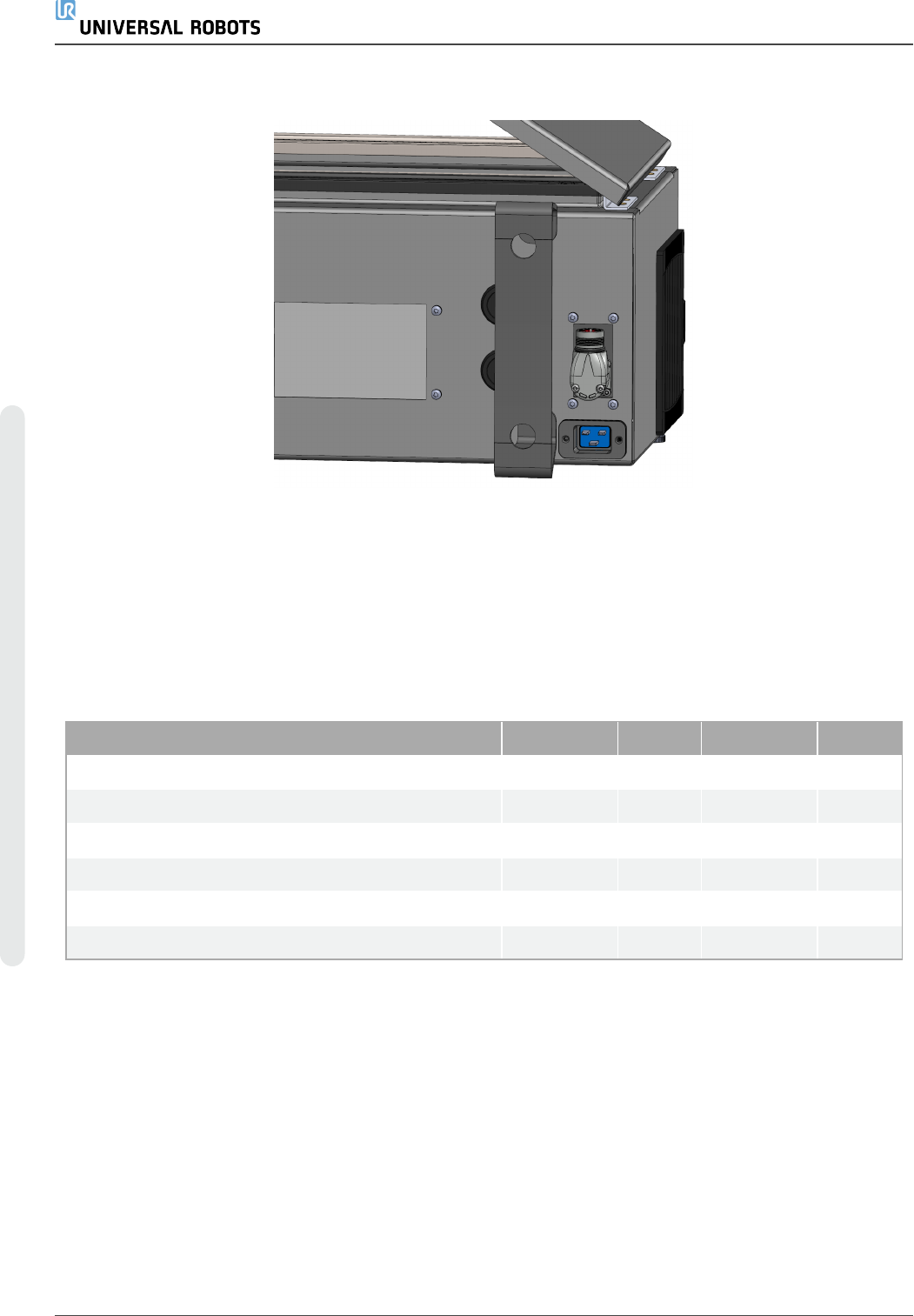
要使机器人通电,控制箱必须与电源相连,这个过程必须使用相应的 IEC C19 电线连接控制
箱底部的标准 IEC C20 插头来完成,请参见下图。
电源配备以下附件:
• 接地接头
• 市电保险丝
• 剩余电流断路器
建议对机器人应用中的所有设备的电源安装电源开关,以便于在维修时上锁挂牌。电气规范
如下表所示。
参数 最小值 类型 最大值 单位
输入电压 100 - 240 VAC
外部市电保险丝( 100-200V 时) 15 - 16 A
外部市电保险丝 (@ 200-265V) 8 - 16 A
输入频率 47 - 440 Hz
备用电源 - - <1.5 W
额定工作功率 90 250 500 W
UR16e 40 用 户 手 册
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
警告
1. 请确保机器人以正确的方式接地( 电气接地) 。请使用未用的且与控制箱
内接地标志相连的插销来为系统内的所有设备建立通用接地。接地连接
器应至少有该系统内最高电流的额定电流。
2. 确保控制箱的输入电源受到剩余电流断路器 (RCD) 和正确的保险丝保
护。
3. 完成所有服务所需的机器人安装设置后,所有的电源都需上锁挂牌。当
系统上锁后,其他设备都不可给机器人 I/O 供电。
4. 请确保所有的电缆在控制箱通电前都正确连接。务必使用原装电源线。
6.6. 机器人连接:机器人电缆
这一小节说明了使用固定的 6 米机器人电缆配置的机器人手臂的连接。有关使用机座法兰电
缆连接器配置的机器人手臂连接的信息,请参阅6.7. 机器人连接:机座法兰电缆 下一页。
6.6.1. 机器人电缆连接器
通过使用机器人电缆将机器人手臂连接到控制箱来建立机器人连接。
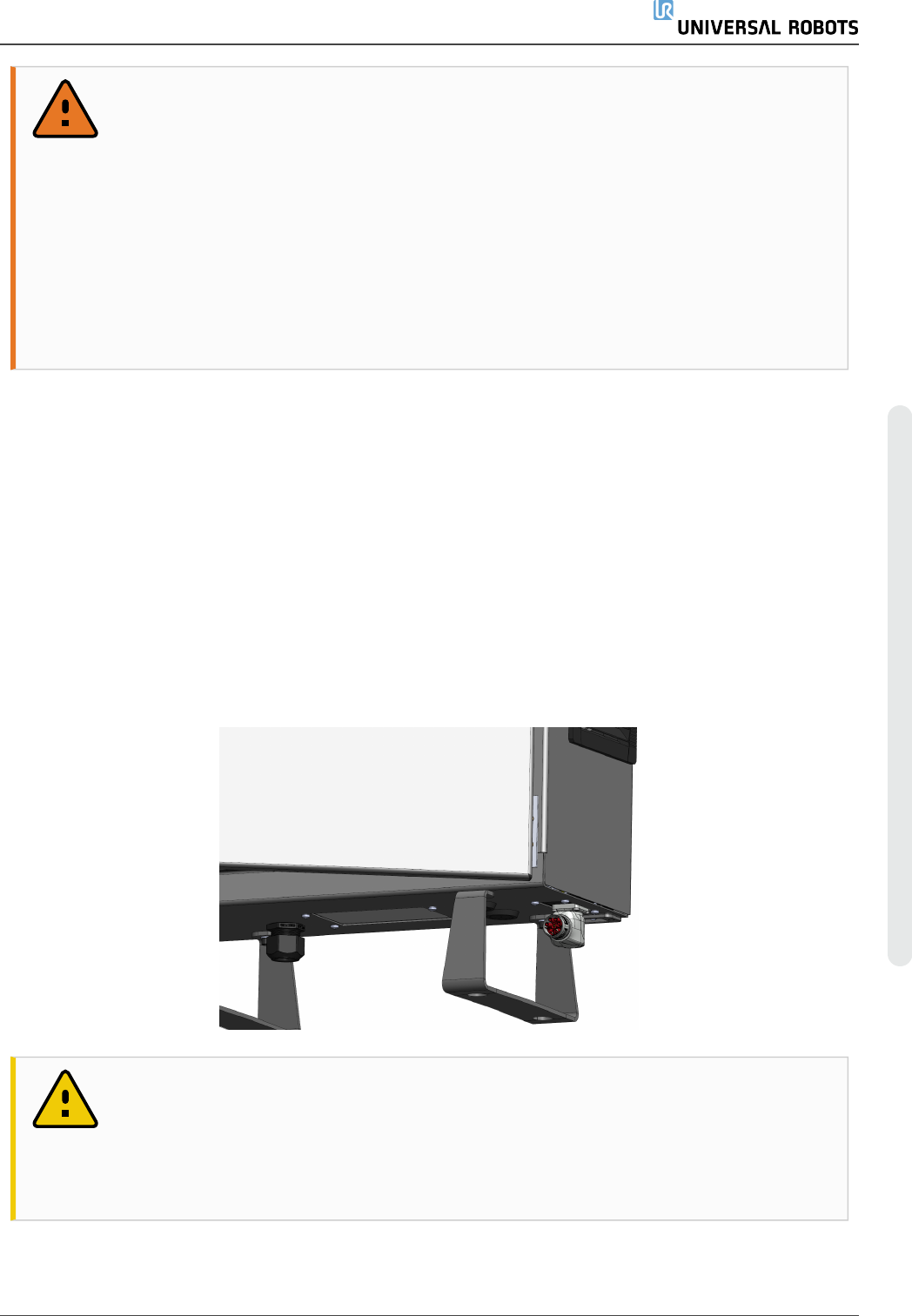
将机器人电缆插入控制箱底部的连接器中并锁定( 请参见下图) 。打开机器人手臂之前,转动
连接器两次以确保其正确锁定。
您可以将连接器向右转,使电缆插入后更容易锁定。
小心
机器人连接不正确可能导致机器人手臂断电。
• 切勿在机器人手臂开启时断开机器人电缆。
• 切勿延长或改装原装机器人电缆。
用 户 手 册 41 UR16e
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
6.7. 机器人连接:机座法兰电缆
这一小节说明了使用机座法兰电缆配置的机器人手臂的连接。有关使用固定的 6 米机器人电
缆配置的机器人手臂连接的信息,请参阅6.6. 机器人连接:机器人电缆 上一页。
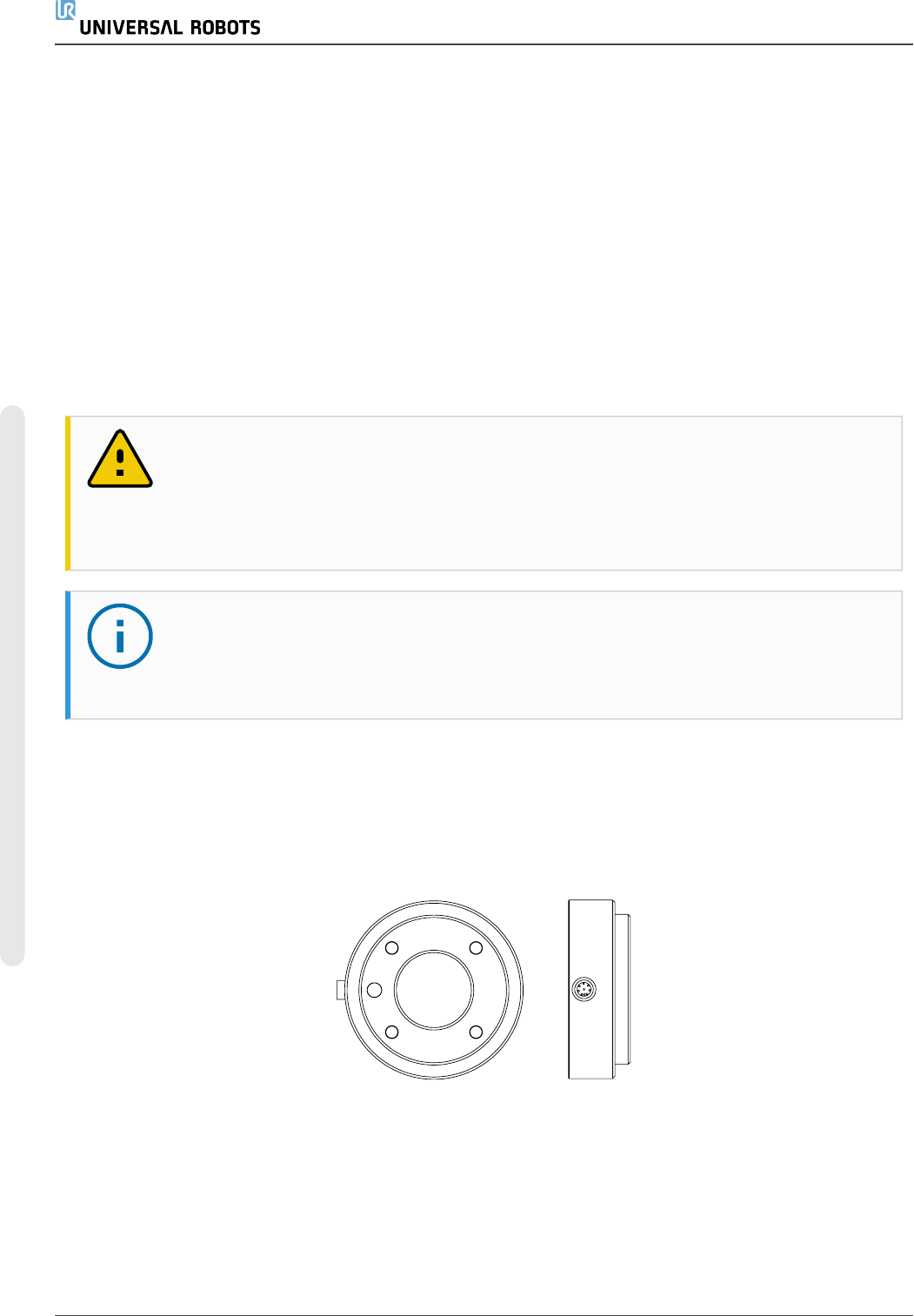
6.7.1. 机座法兰电缆连接器
通过使用机器人电缆将机器人手臂连接到控制箱来建立机器人连接。机器人电缆会连接到机
座法兰电缆连接器和控制箱连接器。
您可以在建立机器人连接后锁定每个连接器。
小心
从机器人手臂到控制箱的机器人连接距离最远为 12 m。机器人连接不正确可
能导致机器人手臂断电。
• 请勿延长 6 m 的机器人电缆。
注意
将机座法兰电缆直接连接到任何控制箱可能会导致设备或财产损失。
• 请勿将基座法兰电缆直接连接到控制箱。
6.8. 工具 I/O
在手腕 3 上的工具法兰旁边有一个八针连接器,它为连接到机器人的不同抓手和传感器提供
电源和控制信号。Lumberg RKMV 8-354 是一款合适的工业电缆。电缆内部八条线的颜色各不
相同,分别代表不同的功能。
此连接器为特定机器人工具上使用的夹持器和传感器提供电源和控制信号。下面列出的工业
电缆适用:
• Lumberg RKMV 8-354。
UR16e 42 用 户 手 册
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。