99469_UR16e_User_Manual_zh_Global.pdf - 第90页
电 源 100 -240 V AC , 47-44 0 H z TP C ab le : Teach P e nda nt to C ontrol B ox 4.5 m / 177 in 机 器 人 电 缆 : 机 器 人 手 臂 至 控 制 箱 ( 选 件 ) 标 准 (P VC ) 6 m/236 in x 13.4 mm 标 准 (P VC ) 12 m/47 2.4 in x 13.4 mm H i Fl ex ( …
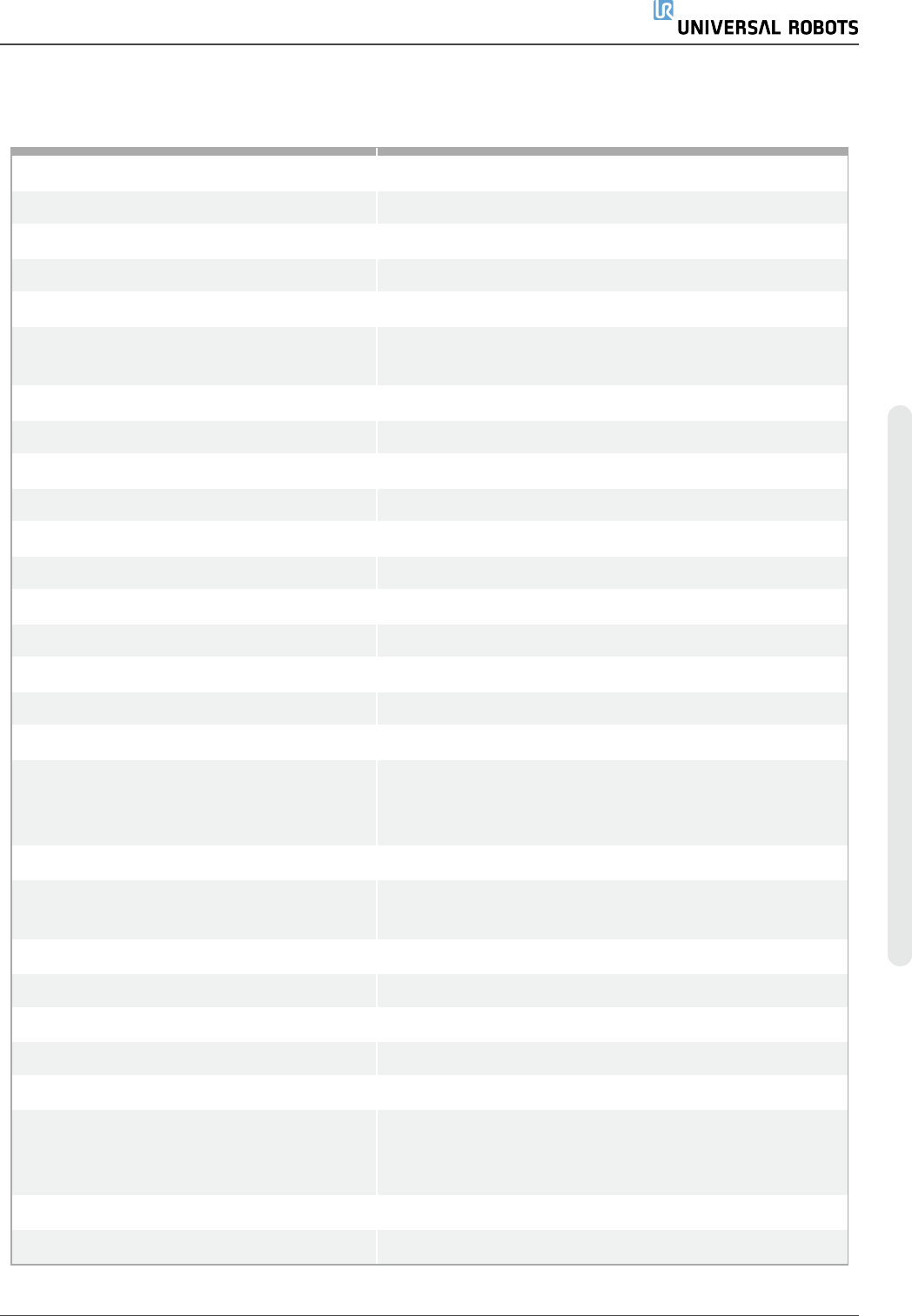
16.技术规格
机器人类型 UR16e
重量 33.1kg / 72.9lb
最大有效载荷 16kg / 35.2lb
延伸 900mm / 35.4in
关节范围 ± 360° for all joints
Speed
机座和肩部关节:最大为 120°/s。所有其他关节:最
大为 180°/s。Tool: Approx. 1
m
/
s
/ Approx. 39.4
in
/
s
.
System Update Frequency 500Hz
力矩传感器精度 5.5N
位姿可重复性 ± 0.05mm / ± 0.0019in( 1.9密耳) ,符合 ISO 9283
足迹 Ø190mm / 7.5in
自由度 6 rotating joints
控制箱尺寸( 宽 × 高 × 厚) 460mm × 449mm × 254mm / 18.2in × 17.6in × 10in
控制箱 I/O 端口 16 digital in, 16 digital out, 2 analog in, 2 analog out
工具 I/O 端口 2 个数字输入,2 个数字输出,2 个模拟输入
工具通信 RS
工具 I/O 电源 12V/24V 2A( 双针) 1A( 单针)
I/O 电源 24V 2A in Control Box
通信
TCP/IP 1000 Mbit: IEEE 802.3ab, 1000BASE-T
Ethernet socket, MODBUS TCP & EtherNet/IP
Adapter, Profinet
编程 PolyScope graphical user interface on 12" touchscreen
噪声
Robot Arm: Less than 65dB(A) Control Box: Less than
50dB(A)
IP 等级 IP54
清洁房间分类 机器人手臂:ISO 5 类,控制箱:ISO 6 类
平均电源最大值 585W
功耗 Approx.350W using a typical program
短路电流额定值 (SCCR) 200A
协同操作
17 advanced safety functions. In compliance with: EN
ISO 13849-1:2008, PLd, Cat.3 and EN ISO 10218-
1:2011, clause 5.10.5
材质 Aluminium, PP plastic
温度
用 户 手 册 75 UR16e
16.技 术规 格
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
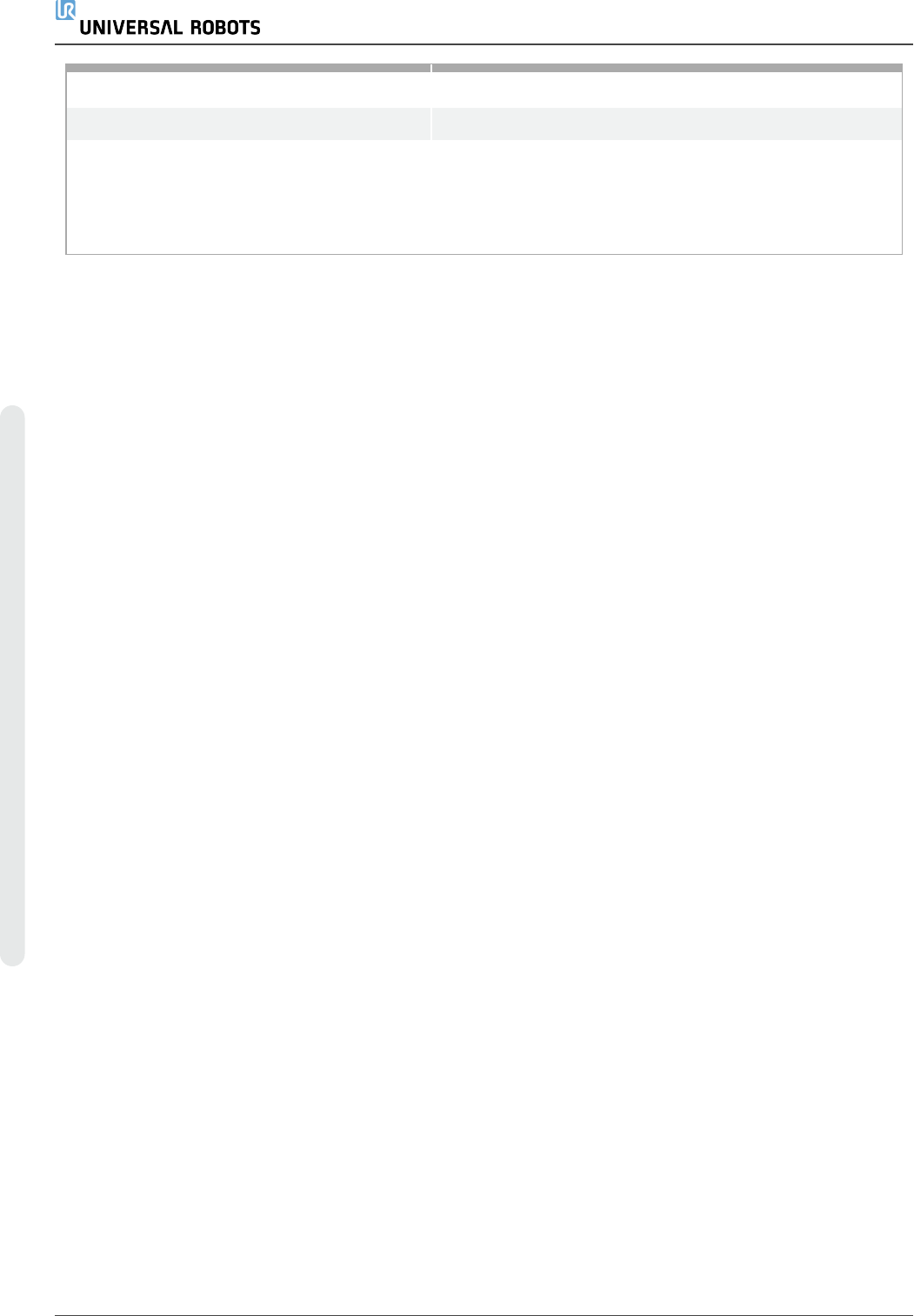
电源 100-240VAC,47-440Hz
TP Cable: Teach Pendant to Control Box 4.5m / 177in
机器人电缆:机器人手臂至控制箱( 选
件)
标准 (PVC) 6 m/236 in x 13.4 mm
标准 (PVC) 12 m/472.4 in x 13.4 mm
HiFlex (PUR) 6 m/236 in x 12.1 mm
HiFlex (PUR) 12 m/472.4 in x 12.1 mm
UR16e 76 用 户 手 册
16.技 术规 格
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
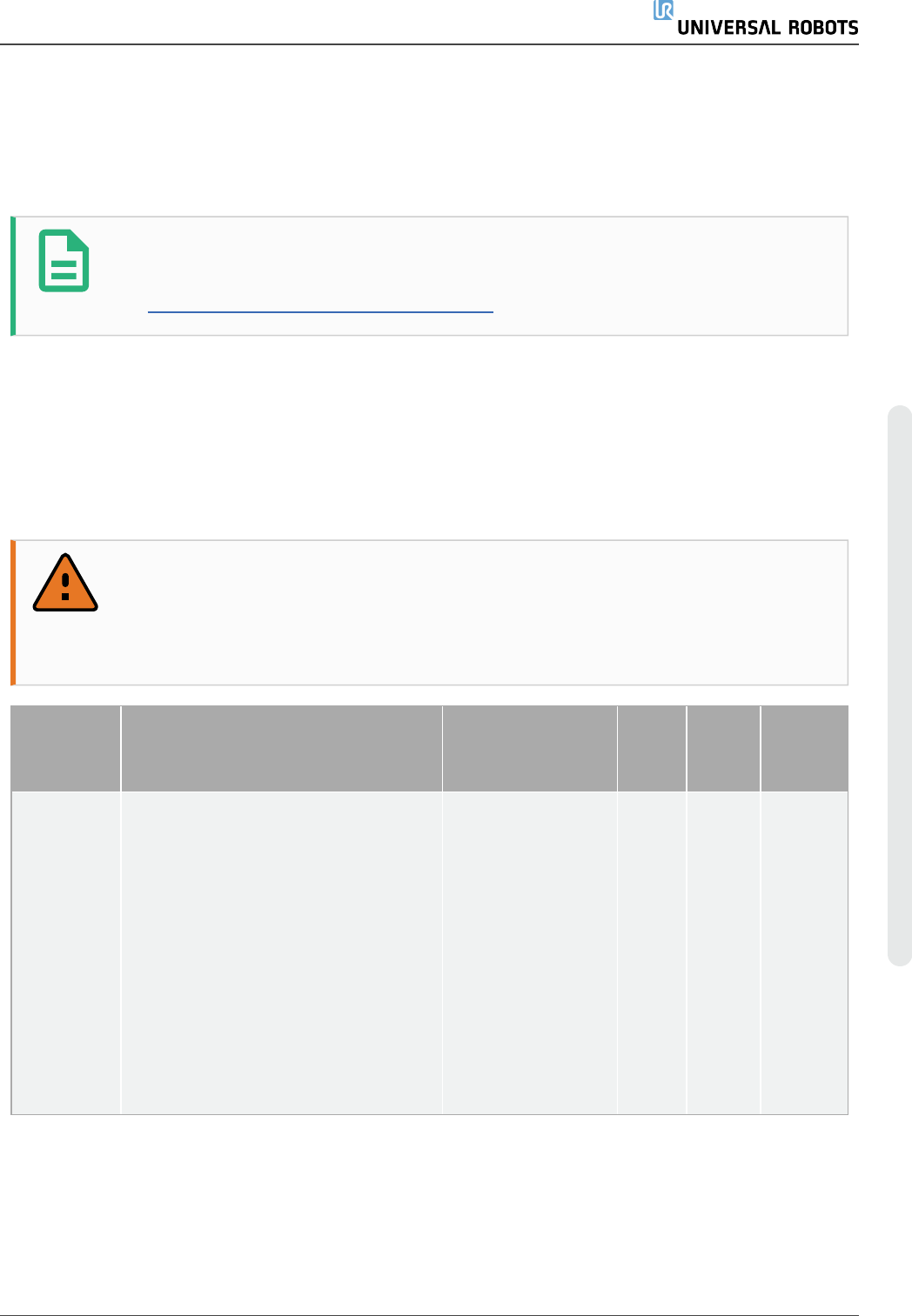
17.安全功能表
17.1. Table 1
提示
本章中介绍的安全功能表是简化版本。您可以访问以下链接查看其完整版
本:https://www.universal-robots.com/support
Universal Robots e-Series Safety Functions and Safety I/O are PLd, Category 3 (ISO 13849-1), with
certification by TŰV NORD (certificate # 44 207 14097610).
Safety Function (SF) Descriptions (see Chapter 2 of manual: For safety I/O, the resulting safety
function including the external device or equipment is determined by the overall architecture and the
sum of all PFHds, including the UR robot safety function PFHd. All safety functions are individual safety
functions.
警告
If any safety function limit is exceeded, or a fault is detected in a safety function or
safety-related part of the control system, the result is a Category 0 stop (immediate
removal of power) according to IEC 60204-1.
SF# and
Safety
Function
Description What happens?
Tole-
rance
PFHd Affects
SF1
1,2,3,4
Emergency
Stop
(according
to ISO
13850)
Pressing the Estop PB on the
pendant1 or the External Estop (if
using the Estop Safety Input) results
in a Cat 1 stop with power removed
from the robot actuators and the tool
I/O. Command1 all joints to stop and
upon all joints coming to a monitored
standstill state, power is removed.
See Stop Time and Stop Distance
Safety Functions. ONLY USE FOR
EMERGENCY PURPOSES, not
safeguarding.
Category 1 stop
(IEC 60204-1)
-
1.30E-
07
Robot
including
robot
tool I/O
用 户 手 册 77 UR16e
17.安 全功 能表
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。