SER01989020_YV112III Service_J.pdf - 第131页
3- 110 SER01989020 調整 第 3 章 6 6 . 2 2 次リミット ヘッド部がソフトリミットを越えて 2 次リミット領域に突入した場合、サーボ 制御が緊急停止して、メカニカルストッパーへの激突を防ぎます。 (突入速度に よっては軽い衝突をするかもしれません。 )2 次リミットは X Y 軸だけに設けら れており、可動領域の両端にある 2 次リミット検出ドグの取付位置を移動させ て調整します。 6.2.1 X 軸 2 …
3-
109
SER01989020
調整
第
3
章
6
6.1.6 T軸マシンリファレンス
T 軸はトランスファーフック(搬送爪)を基板搬送方向と平行に移動させて、コ
ンベア上の基板を搬入・搬出させます。モーター1 回転当たりの移動量 24mm
のベルト駆動です。原点信号は、モーターの近くに取り付けられた原点センサー
が T 軸スライドプレートの下側に取付られた原点ドグに反応すると出力されま
す。T 軸マシンリファレンスを調整する場合は、下記の手順で行います。
e
1
非常停止ボタンを押します。
2
マシンリファレンスを調整します。
T 軸原点ドグの固定ネジ(2 本)を緩めて、ドグの取り付け位置を移動して調
整してください。(原点ドグはT 軸スライドプレートの下側(X1 軸と X2 軸
アームの間)に取り付けられた比較的大きな金属板です。
マシンリファレンスを大きくする場合:マイナス方向(T 軸モーター側)に
移動する
マシンリファレンスを小さくする場合:プラス方向に移動する
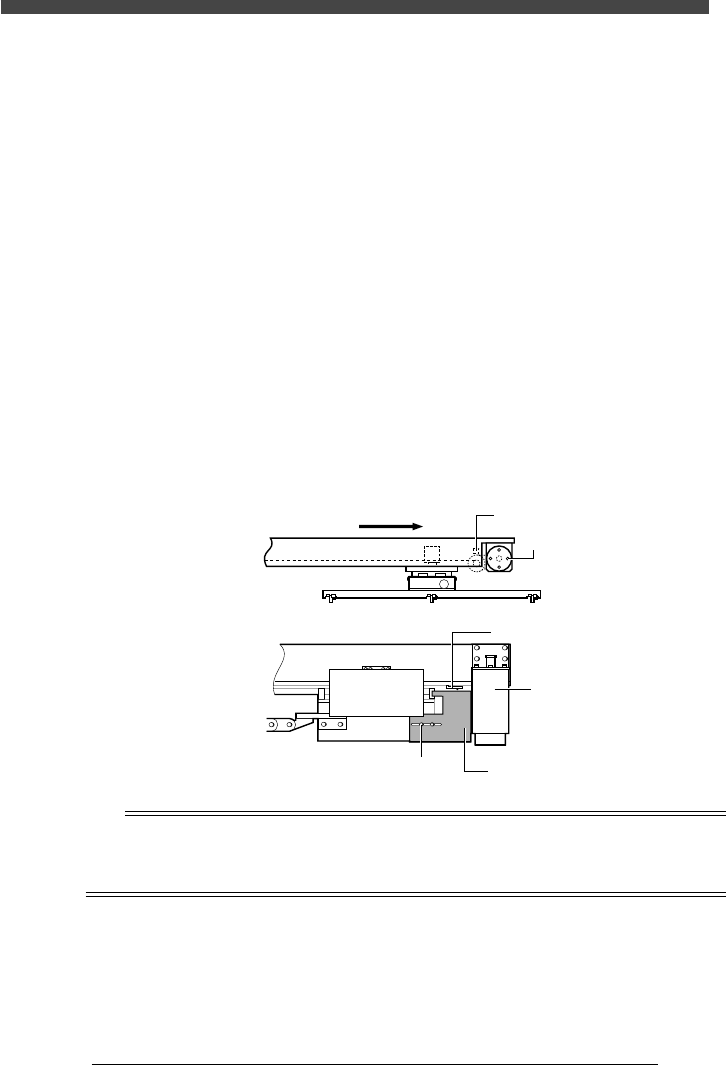
■ T 軸マシンレファレンスの調整
20143610-00
正面図
下面図
原点復帰方向
原点センサー
T軸モーター
原点センサー
T軸モーター
固定ボルト
原点検出ドグ
前
後
n
要点
原点ドグは大きく移動させないでください。(最大12mm)大きく動かすと原点位置が変化するこ
とがあります。原点ドグの移動 2mmで約8%のマシンリファレンスが増減することを目安としてく
ださい。
3
調整後、原点ドグの固定ネジを締めます。
マシンリファレンスが許容範囲に設定されていることを確認してください。

3-
110
SER01989020
調整
第
3
章
6
6.2 2 次リミット
ヘッド部がソフトリミットを越えて2 次リミット領域に突入した場合、サーボ
制御が緊急停止して、メカニカルストッパーへの激突を防ぎます。(突入速度に
よっては軽い衝突をするかもしれません。)2 次リミットは XY 軸だけに設けら
れており、可動領域の両端にある2 次リミット検出ドグの取付位置を移動させ
て調整します。
6.2.1 X軸2次リミットの設定
X 軸 2 次リミットは、メカリミットから 5.0mm内側に設定します。
1
軸を選択します。
後述の手順で座標表示させる軸をあらかじめ指定しておきます。「3/4/ A1
アームの選択」→「A テーブルXY 軸」または「B テーブル XY 軸」を選択実
行してください。(YPUの [SEL AXIS] または [AXIS GROUP] キーを押し
て、軸選択してもかまいません。)手動モード画面の下に選択した軸の現在の
座標値が表示されます。
e
2
非常停止ボタンを押します。
3
ヘッド部を手で軸端まで移動させ、その座標値を確認します。
手でヘッド部をどちらか一方のX 軸メカニカルストッパーに押し当て、この
ときに手動モード画面の下部に表示されたX 軸座標値(メカリミット)をメ
モしてください。(画面左下の「非常停止中 !」の点滅メッセージは「2 次リ
ミットオーバー!」を表示しているはずです。)
参考
・ 2次リミットセンサーの示LEDは、ドグを検出していないときは点灯しており、検出すると消灯
します。
・ メカリミットの座標値は後述のソフトリミット設定のときに必要ですので、メモしておいてく
ださい。
4
押し当て位置からヘッド部をゆっくり戻しながら、2 次リミッ
ト位置を探します。
このとき、画面の下部に表示されたX 座標値を確認しながら、2 次リミットセ
ンサーの反応が切り替わる(画面左下の点滅メッセージが「非常停止中 !」に
変わる)ときのX 軸座標値を確認します。
この座標値が、Step 3 でメモしたメカリミットより5.0mm 内側にあれば、
調整は不要です。ずれている場合は、その差を以下の手順で調整してくださ
い。
3-
111
SER01989020
調整
第
3
章
6
5
ヘッド部を内側に移動させ、2 次リミット検出ドグの固定ネジ
を緩めます。
2 次リミット検出ドグは、X 軸の両端にネジで固定されています。ドグがスラ
イドする程度にネジを緩めてください。(取り外さない)
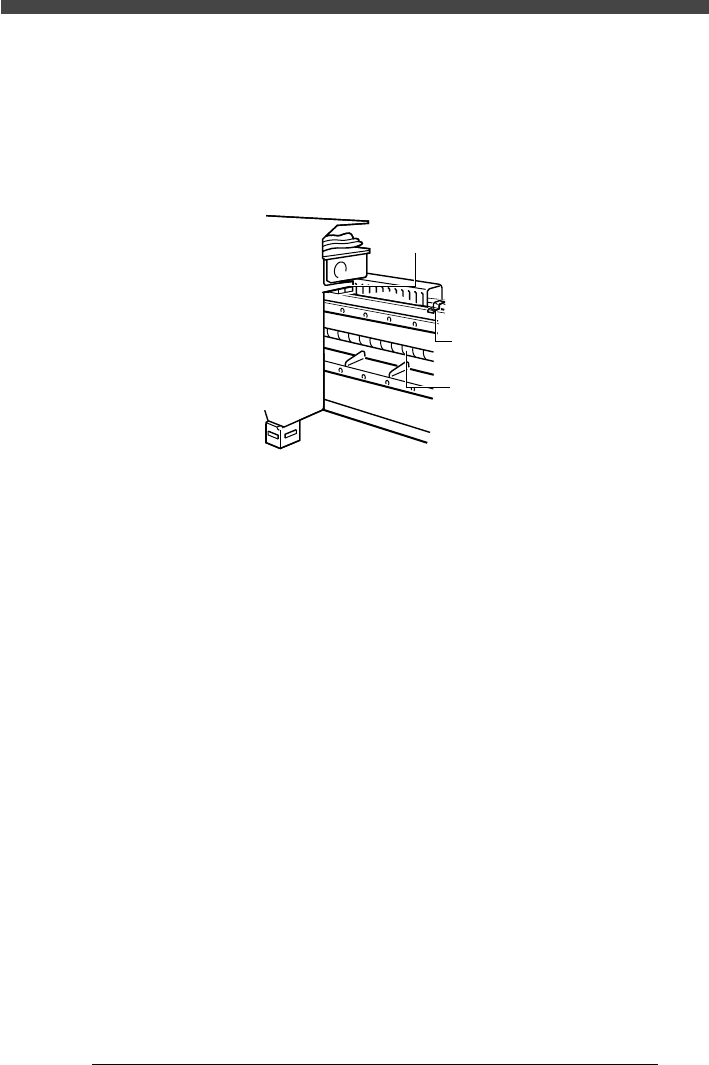
■ X 軸2 次リミットセンサーと検出ドグ
20043607-00
ヘッド
2次リミットセンサー
2次リミット検出ドグ
X軸ボールスクリュー
6
2 次リミットドグの取付位置をずらして調整します。
Step 4 でずれていた分だけ、2 次リミット検出ドグの取付位置を移動してく
ださい。Step 4 と同じ操作を行って、2 次リミット位置がメカリミットから
5.0mm内側に設定されていることを確認してください。
7
2 次リミット検出ドグの固定ネジを締めます。
8
他方の2 次リミットについても、同様に設定します。
設定が終了したら、手でヘッド部を動かして、移動許可領域内に戻してくださ
い。