SER01989020_YV112III Service_J.pdf - 第137页
3- 116 SER01989020 調整 第 3 章 6 6 接触位置(メカリミット)をティーチングします。 1. 「 3/3/B1 調整項目選択」→「ソフトリミット」を選択実行し、ソフトリ ミット画面を開きます。 2 . 矢印キーを使って、カーソルを「W 1 RIGHT 」の「プラス方向」または 「マイナス方向」欄に合わせます。 Step 2 で移動させた「方向」にカーソルを合わせてください。 3. [F10] キ ー を 2 回押…
3-
115
SER01989020
調整
第
3
章
6
n
要点
YPUのジョイスティックを左に倒すとコンベア幅が拡大し、右に倒すと縮小します。メカニカルス
トッパーに接触しない範囲で、最大あるいは最小幅にしてください。(現在のソフトリミットがメ
カリミットより内側に設定されていれば、そこで軸移動は停止します。)
e
3
非常停止ボタンを押してから、コンベア幅を動かします。
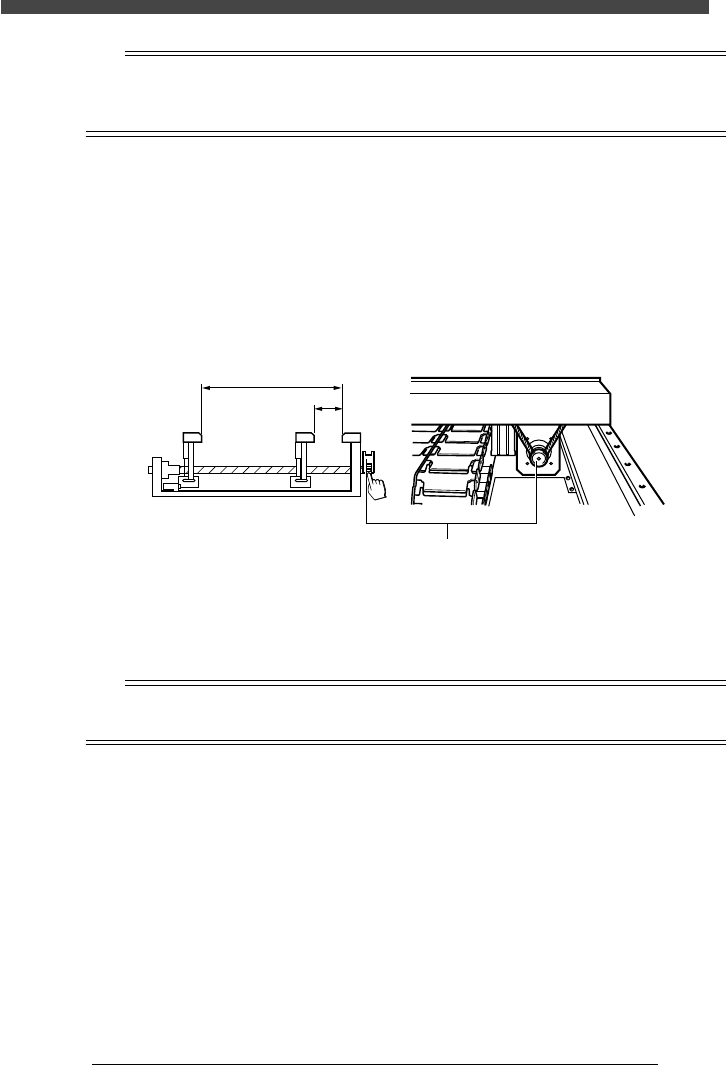
W1 軸(搬入コンベア幅軸)のプーリーを手で回して、メカニカルストッパー
に接触するまでコンベアを動かしてください。
この位置でのコンベア最大幅は約410.0mm、最小幅は約 45.0mmになりま
す。メジャーなどで測定して確認してください。
■ W 軸プーリー
20043611-00
Min.45.00
Max.410.00
プーリー
側面図 正面図
4
安全を確認して、非常停止を解除します。
非常停止ボタンを回転解除し、[READY] ボタンを押してください。
e
参考
以下の手順(Step 5∼8)は、非常停止状態のままでも行うことができます。非常停止中であるこ
とを知らせる警告画面が現れたときは、どれかのキーを押すとクリアできます。
5
「3/3/B4 ティーチング実行条件」を選択実行します。
ティーチングユニットと運転速度はどれでもかまいません。
3-
116
SER01989020
調整
第
3
章
6
6
接触位置(メカリミット)をティーチングします。
1.「3/3/B1 調整項目選択」→「ソフトリミット」を選択実行し、ソフトリ
ミット画面を開きます。
2. 矢印キーを使って、カーソルを「W1 RIGHT」の「プラス方向」または
「マイナス方向」欄に合わせます。
Step 2で移動させた「方向」にカーソルを合わせてください。
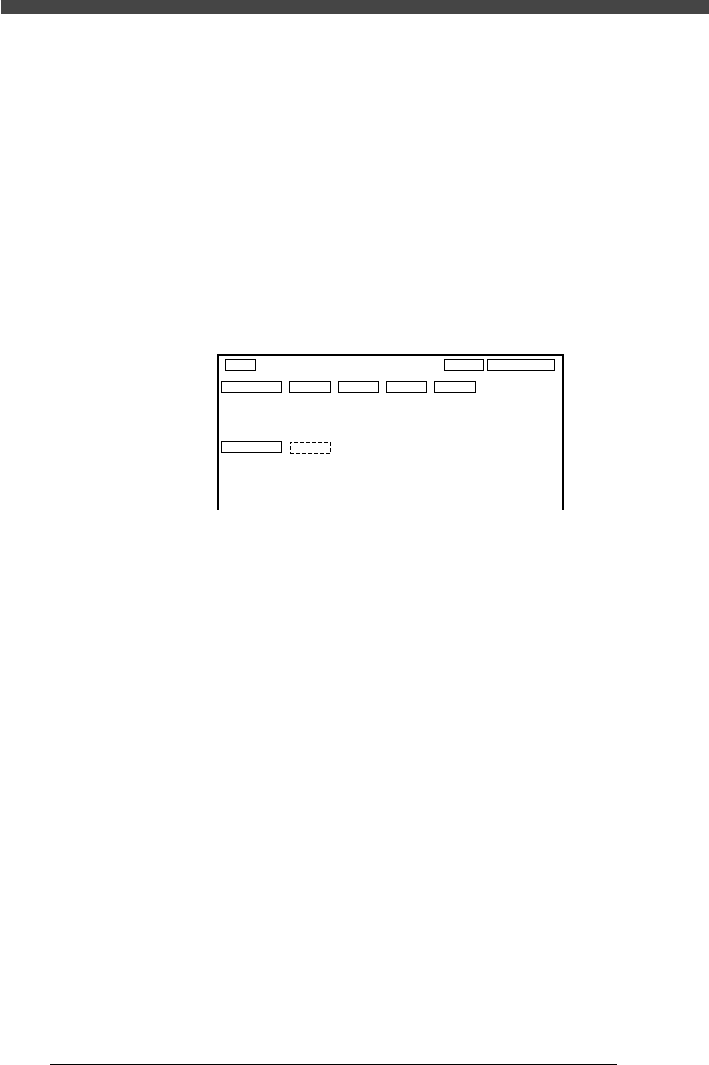
3. [F10] キーを2回押して、ティーチングを実行します。
カーソルを合わせた数値が変化します。この値がメカリミットです。
0
■ W 軸ソフトリミット設定画面
60143626-00
軸
ソフトリミット
プラス方向
-408.00
-408.37
-406.23
-406.25
-361.03
-360.25
-348.51
-350.02
3.33
3.85
5.03
5.80
マイナス方向 初期位置 初期移動
W1/RIGHT
W2/A-TBL
W3/B-TBL
W4/LEFT
編集中
編集対象
7
ソフトリミットを設定します。
プラス側はメカリミットから 3.0mm 減算、マイナス側は 3.0mm 加算した値
を入力してください。
8
他のW 軸も同じようにソフトリミットを設定します。
「W2 A_TBL」・「W3 B_TBL」・「W4 LEFT」についてもStep 1 ∼ 7と同様
にメカリミットを求め、プラス側は3.0mm 減算、マイナス側は 3.0mm 加算
した値を入力してください。
9
調整データを保存します。
[ESC] キーを押してから、「B2 調整後データ保存」または「B0 データ保存後
終了」を選択実行してください。(保存したくない場合は、「B3 調整前データ
復活」または「B7 強制終了」を選択実行してください。)
3-
117
SER01989020
調整
第
3
章
6
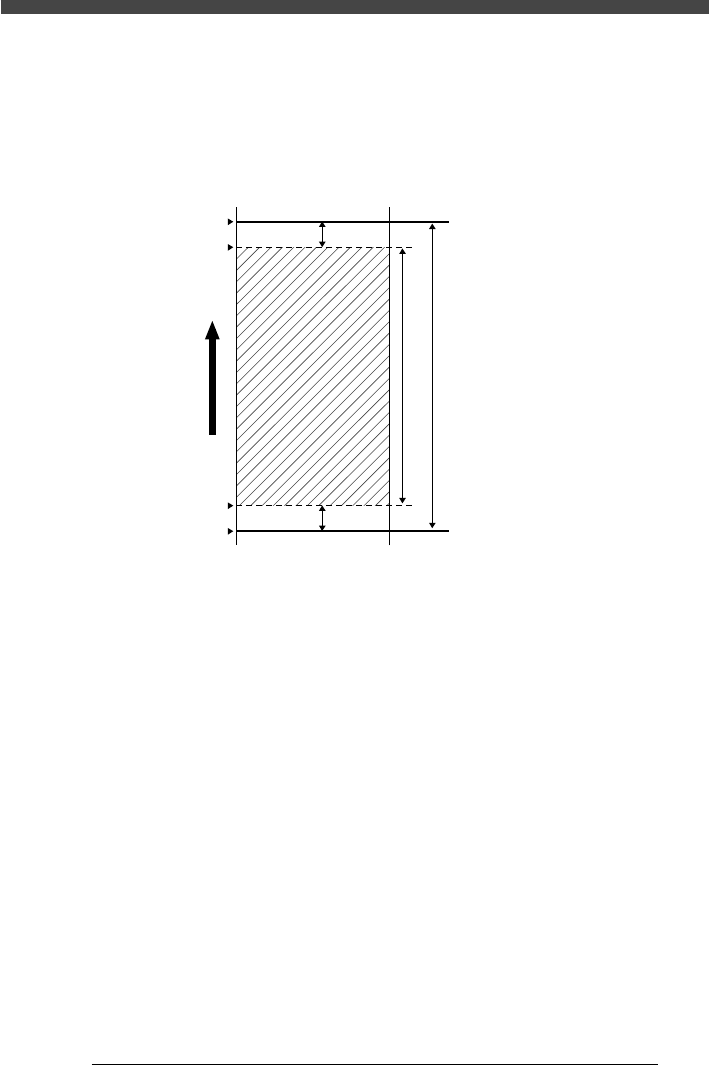
6.3.2 Z軸ソフトリミットの設定
Z 軸ソフトリミットは、プラス・マイナス側ともにメカリミットから1.0mm 内
側に設定します。
■ Z 軸移動許可領域
20143613-01
A
C
1.0
1.0
D
E
F
B
<後>
<前>
原点復帰方向
A:横造的可動領域
B:移動許可領域
C:マイナスソフトリミット
D:プラスソフトリミット
E:マイナス側メカリミット
F:プラス側メカリミット
e
1
非常停止ボタンを押します。
2
Z 軸(ヘッド部)を手で軸端まで移動させます。
ヘッド部を手で上または下に移動させて、メカニカルストッパーに押し当てま
す。
プラス側を設定する場合は下方向、マイナス側の場合は上方向に移動させてく
ださい。
上方向に移動させたときは、ヘッドの自重でZ 軸が下がりますので、添木など
を使うか、誰かに支えてもらうとよいでしょう。
3
「3/3/B4 ティーチング実行条件」を選択実行します。
ティーチングユニットと運転速度はどれでもかまいません。。