SER01989020_YV112III Service_J.pdf - 第150页
3- 129 SER01989020 調整 第 3 章 6 2 調整データを保存します。 [ESC] キーを押してから、 「B 2 調整後データ保存」または「B 0 データ保存後 終了」を選択実行してください。 (保存したくない場合は、 「B 3 調整前データ 復活」または「B 7 強制終了」を選択実 行してください。 )
3-
128
SER01989020
調整
第
3
章
6
6.4.4 T軸初期移動の設定
トランスファーフックが基板を搬送するときのストローク量です。標準仕様の
M タイプでは、爪間の距離と同じ 430.0mm の固定値です。(L タイプは
560.0mm です。)固定値と異なっていたら、ソフトリミット画面で正しい初期
移動の値に設定してください。
自動運転を実行すると、トランスファーフックは、まず初期位置から「基板長さ
+ 30.0mm」の距離だけ搬入側(マイナス方向)に戻ります。その位置から、
「戻った距離 + 初期移動」の距離を搬出側(プラス方向)に軸移動して、基板を
搬送します。
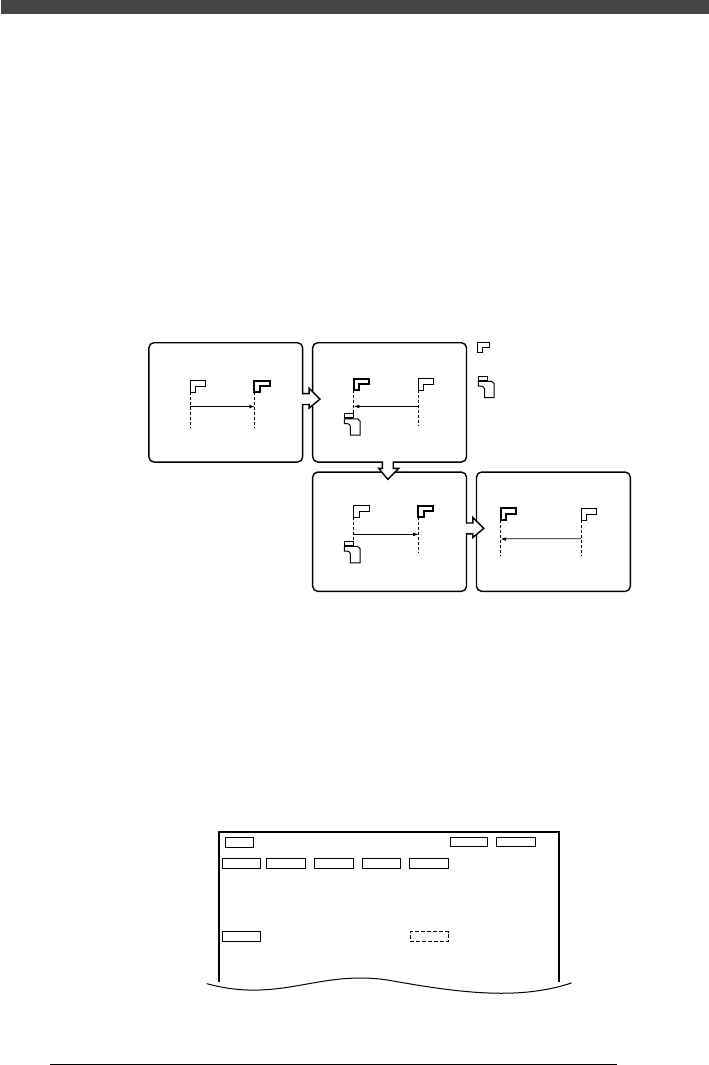
■ T 軸の動き(コンベア左流れの場合)
20143620-00
自動運転
T軸中央爪
Aテーブル
メインストッパー
原点位置 初期位置 原点位置
初期位置 待機位置
搬送完了
位置
待機位置
基板長さ+30.0mm 基板長さ+30.0mm
+初期移動
1
T 軸の初期移動を入力します。
1.「3/3/B1 調整項目選択」→「ソフトリミット」を選択実行し、ソフトリ
ミット画面を開きます。
2. 矢印キーを使って、カーソルを「T/MAIN」の「初期移動」に合わせ、
430.0(Lタイプは 560.0)を入力します。
■ T 軸初期移動の設定画面
60143621-00
軸 プラス方向
-1047.05
マイナス方向
-53.35
初期位置
436.50
初期移動
430.00
編集中 編集対象 ソフトリミット
T/MAIN

3-
129
SER01989020
調整
第
3
章
6
2
調整データを保存します。
[ESC] キーを押してから、「B2 調整後データ保存」または「B0 データ保存後
終了」を選択実行してください。(保存したくない場合は、「B3 調整前データ
復活」または「B7 強制終了」を選択実行してください。)
3-
130
SER01989020
調整
第
3
章
7
7. 実装調整
搭載精度に関係する種々の調整が完了した後に、部品を基板に試搭載させなが
ら、最終的な仕上げ調整を行います。実装状態を移動カメラで画像認識して自動
的に搭載精度を補正する「自動フィードバック」と、目視で調べた補正値をキー
入力する通常の「搭載フィードバック」を使って調整します。
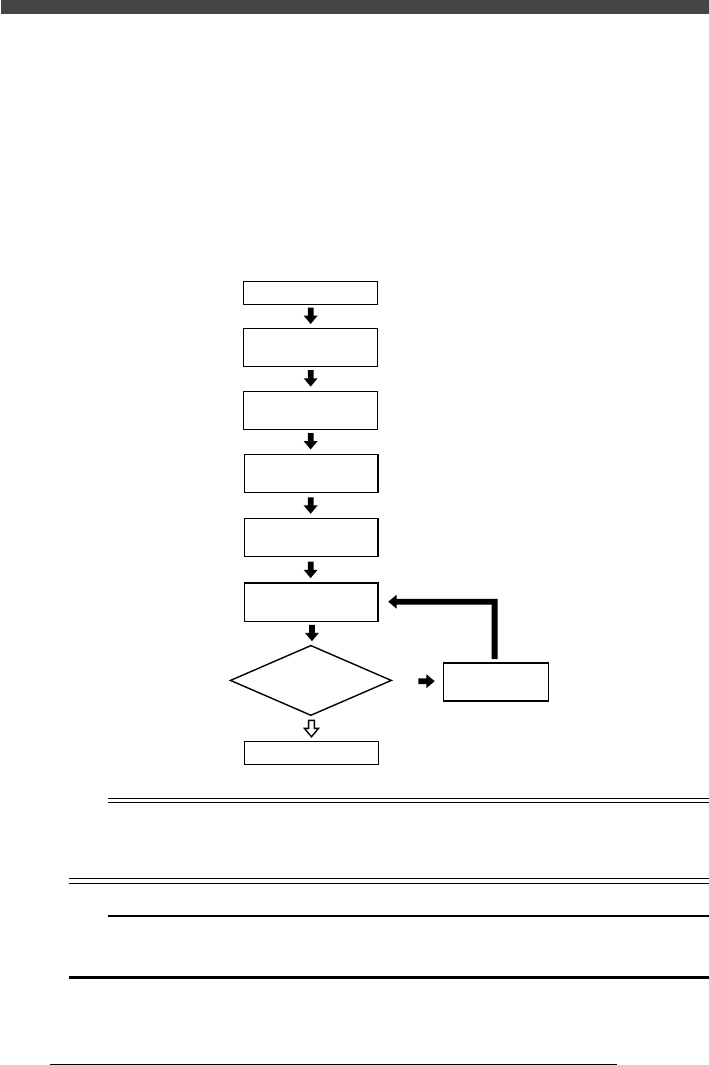
■ 搭載フィードバックを使った実装調整フロー
20153701-00
基板と部品の準備をする
搭載の準備をする
(ATMFB112)
搭載を実行する
(ATMFB112)
自動搭載
フィードバック
搭載の準備をする
(ADJ_L_MOUNT_MULTI)
搭載を実行する
(ADJ_L_MOUNT_MULTI)
搭載ズレがあるか?
(X, Y位置ずれ)
終 了
YES
搭載
フィードバック
NO
n
要点
調整作業を効率よく行うために、最初に「自動搭載フィードバック」による調整を2度行います。
それでもまだズレがある場合は、補正値のキーボード入力による「搭載フィードバック」を実行し
てください。
c
注意
搭載フィードバックによる仕上げ調整を行う前に、「1.3 R軸絶対精度補正」や「3. 画像認識装
置」をはじめ、「4.1 フィーダープレート」や「7. 作動軸」の調整を完了しておいてください。