SER01989020_YV112III Service_J.pdf - 第85页
3- 64 SER01989020 調整 第 3 章 2 2 . 基板のマシン間乗り継ぎの確認 下図に示すように、標準マシンの出口センサーはコンベア端より 5 0 m m 内側に 取り付けられています。しかし、次のような基板を使用するときは、出口セン サーの位置調整などが必要です。その場合、センサー取り付けネジを緩めて、そ の位置をずらしてください。 ■ 入口センサーと出口センサーの位置 2A043220-00 PCB PCB 50mm…
3-
63
SER01989020
調整
第
3
章
2
4
入力モニター画面を開き、基板センサーからの入力状態を確認
します。
1.「3/4/ 手動」→「C2 入力モニター」を選択実行します。
2. 矢印キーを使って、カーソルを「NL01」∼「NL09」に合わせます。
対象部の入力表示が、基板を検出したときに "1"、検出していないときに
"0" になることを確認します。
[TAB] キーを押して入力モニター画面と出力モニター画面を切り替えなが
ら、ロケートピンやプッシュアップを上昇・下降させても、基板検出状態
が変わらないことを確認します。
k
60143218-00
[↑↓←→]で選択し [Enter]で実行
[ESC]:中断,コマンドウィンドウヘ
入力モニター
指定アーム:Aテーブル XY軸
軸移動速度: 100
NL09 Aテーブル基板固定位置基板検出
感知時 1
名 称 IN
コンベア/Aテーブル NL09-16 10000000
名 称 OUT
5
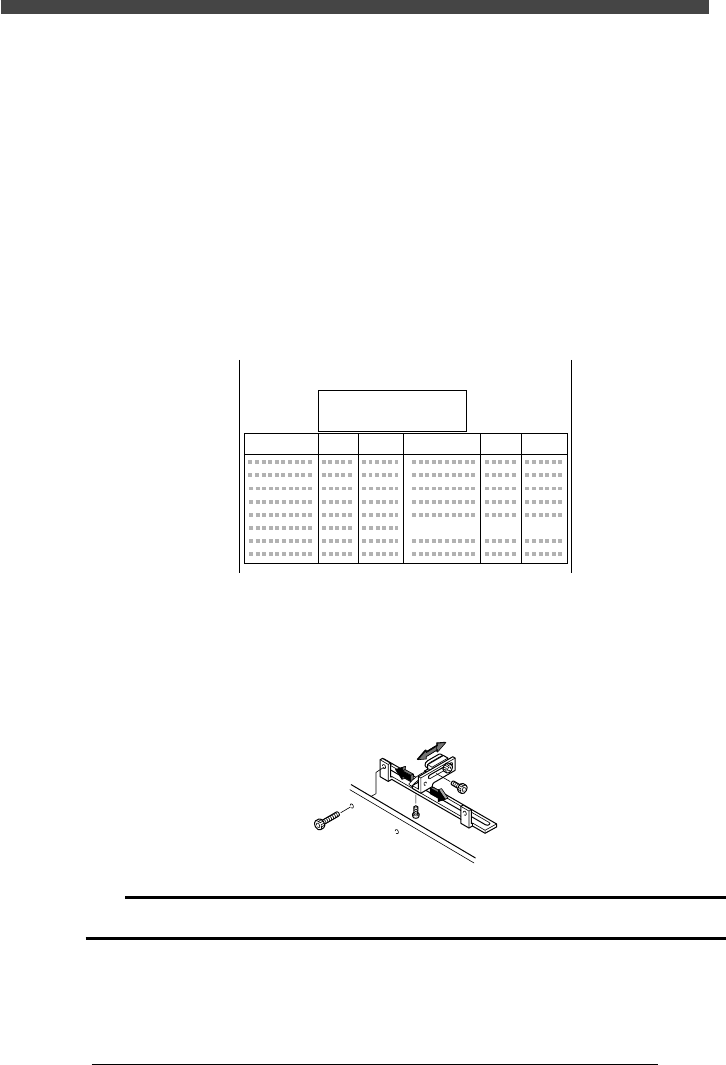
必要ならば、基板センサーの位置を調整します。
センサーを固定しているネジを緩め、位置や取り付け角度などを調整してくだ
さい。
■ 基板センサーの位置調整
10043219-00
n
要点
割り基板の割りの部分や基板のスリットの下に基板センサーが位置しないようにしてください。
6
基板をコンベアから取り外して、終了します。
3-
64
SER01989020
調整
第
3
章
2
2. 基板のマシン間乗り継ぎの確認
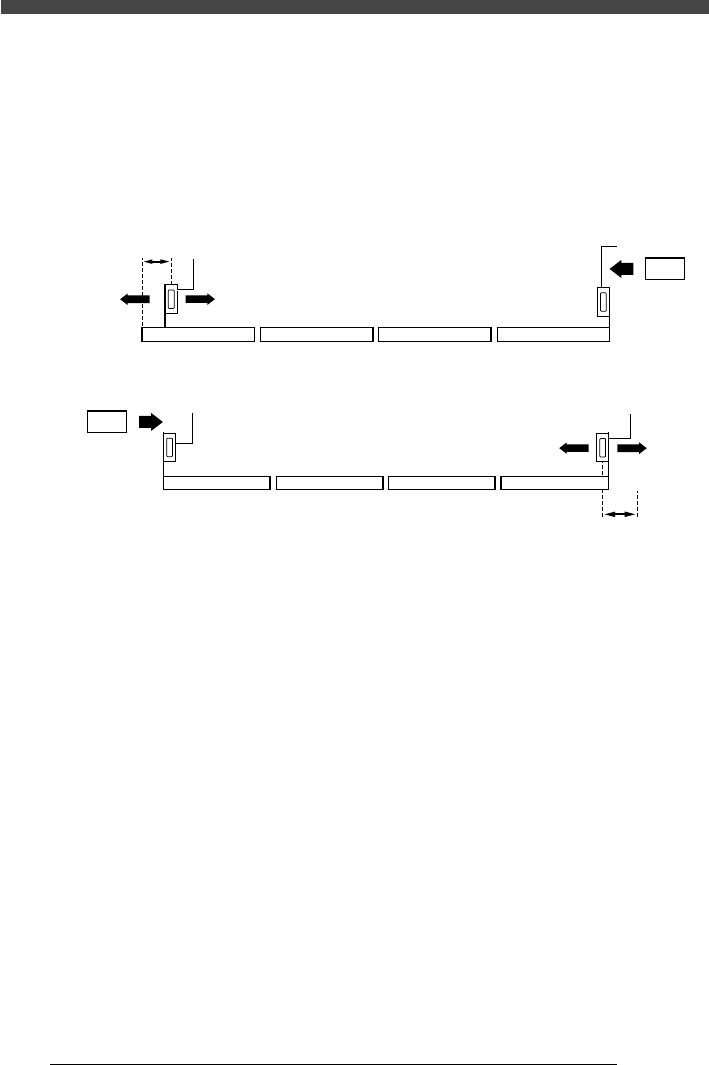
下図に示すように、標準マシンの出口センサーはコンベア端より50mm 内側に
取り付けられています。しかし、次のような基板を使用するときは、出口セン
サーの位置調整などが必要です。その場合、センサー取り付けネジを緩めて、そ
の位置をずらしてください。
■ 入口センサーと出口センサーの位置
2A043220-00
PCB
PCB
50mm
50mm
BA
AB
出口センサー
出口センサー
入口センサー
入口センサー
長さ50mm 以下の基板
出口センサーを基板長に合わせてコンベア端に寄せてください。(A 方向に移
動)
スリットをもつ基板
スリットで出口センサーがオフするため基板の乗り継ぎが悪い場合は、コンベ
ア空転タイマーを調整してみてください。スリットで出口センサーが誤認識す
る場合は、スリットを誤認識しないように出口センサーの位置を調整してくだ
さい。あるいは特注対応として、出口センサーをダブルセンサーにする方法や
拡散反射型(投光面積が広い)の出口センサーを使用する方法もあります。
重い基板(マザーボードなど)
コンベアスピードを遅くするか、出口センサーを上図のB 方向に移動させて基
板がコンベア端に達するまでに停止するように調整してください。
3-
65
SER01989020
調整
第
3
章
3
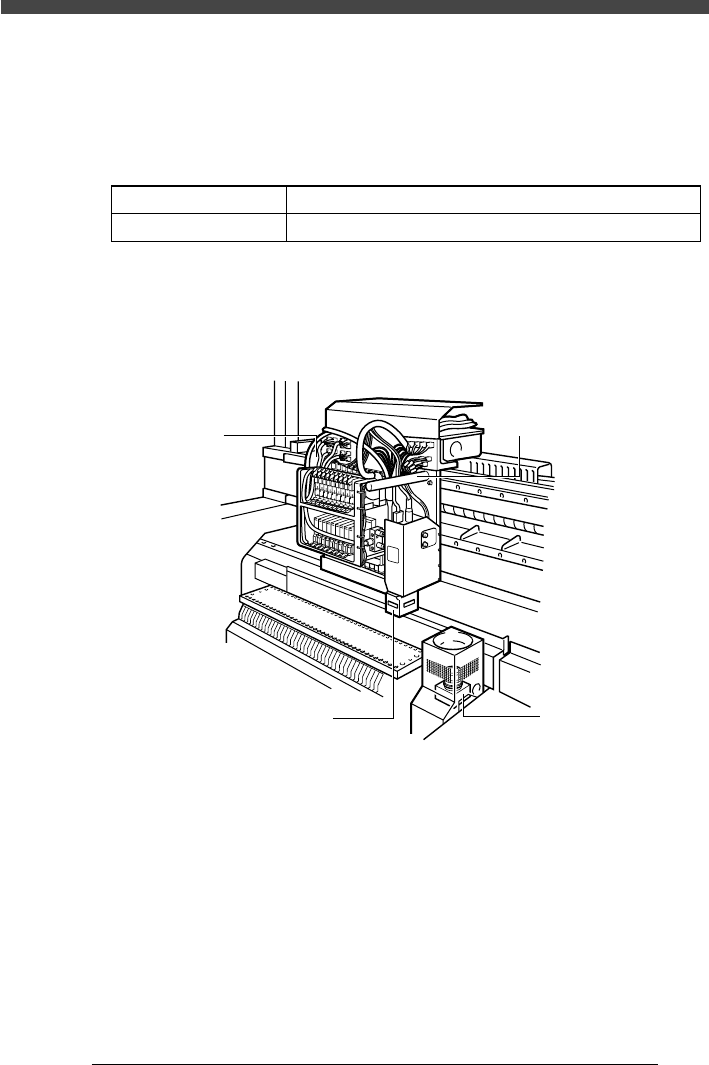
3. 画像認識装置
標準仕様のYV112 では、基板のフィデューシャルマークを認識するための移
動カメラと、部品を高速認識するためのマルチ認識カメラを使用しています。
40143301-00
移動カメラ
マルチ認識カメラ
基板マーク認識 (フィデューシャルマークなど)
部品認識 (QFP部品など)
ここでは、それぞれの認識装置に関する調整方法を説明します。いずれの調整項
目も、「3/3 マシン調整」モードの調整ユーティリティを使います。
■ 画像認識装置
20143105-00
ヘッド部移動用ハンドル
ヘッド部
マルチカメラ
移動カメラ