TR6DNR_维修调整.pdf - 第48页
维修调整要领书 4-2 4- 2. Z 轴原点 、 负向极限传感器的更换及调整 请以调试模式的“ 10. Z JOG ”将 Z 轴移动到看得見传感器的位置,更换传感器。 更换传感器后,仅原点传感器需要进行下述检查。 初始化后,以调试模式的“ 19. XYZ AD J ”进行托盘座板拉出高度的确认。层数 1 是副侧(上段)第 1 层的拉出高度,层数 16 是主侧(下段)第 1 层的拉出高度。 请确认托盘座板 A 与 Y 轨道 B 的空隙为…
维修调整要领书
4-1
4.
传感器的更换及调整
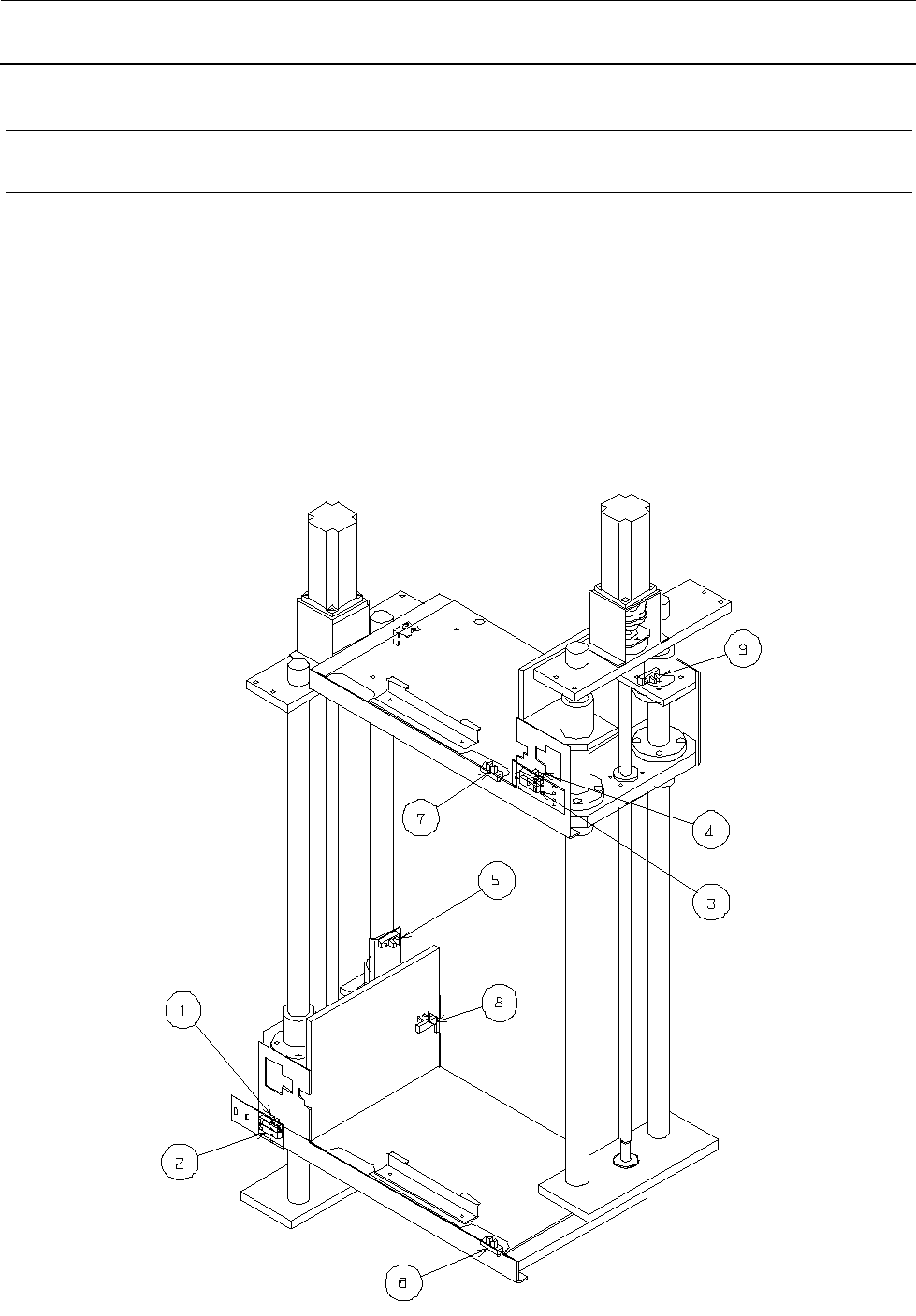
4-1. Z 装置传感器布置图
①ZM 原点传感器(货号:HD001710000)
②ZM 负向极限检知(货号:HD001700000)
③ZS 原点传感器(货号:HD001710000)
④ZS 负向极限检知(货号:HD001700000)
⑤ZM 正向极限检知传感器(货号:HD001700000)
⑥叠盘箱 M 安装传感器(货号:HD001710000)
⑦叠盘箱 S 安装传感器(货号:HD001710000)
⑧叠盘箱 M 锁定传感器(货号:HD001710000)
⑨叠盘箱 S 锁定传感器(货号:HD001710000)
维修调整要领书
4-2
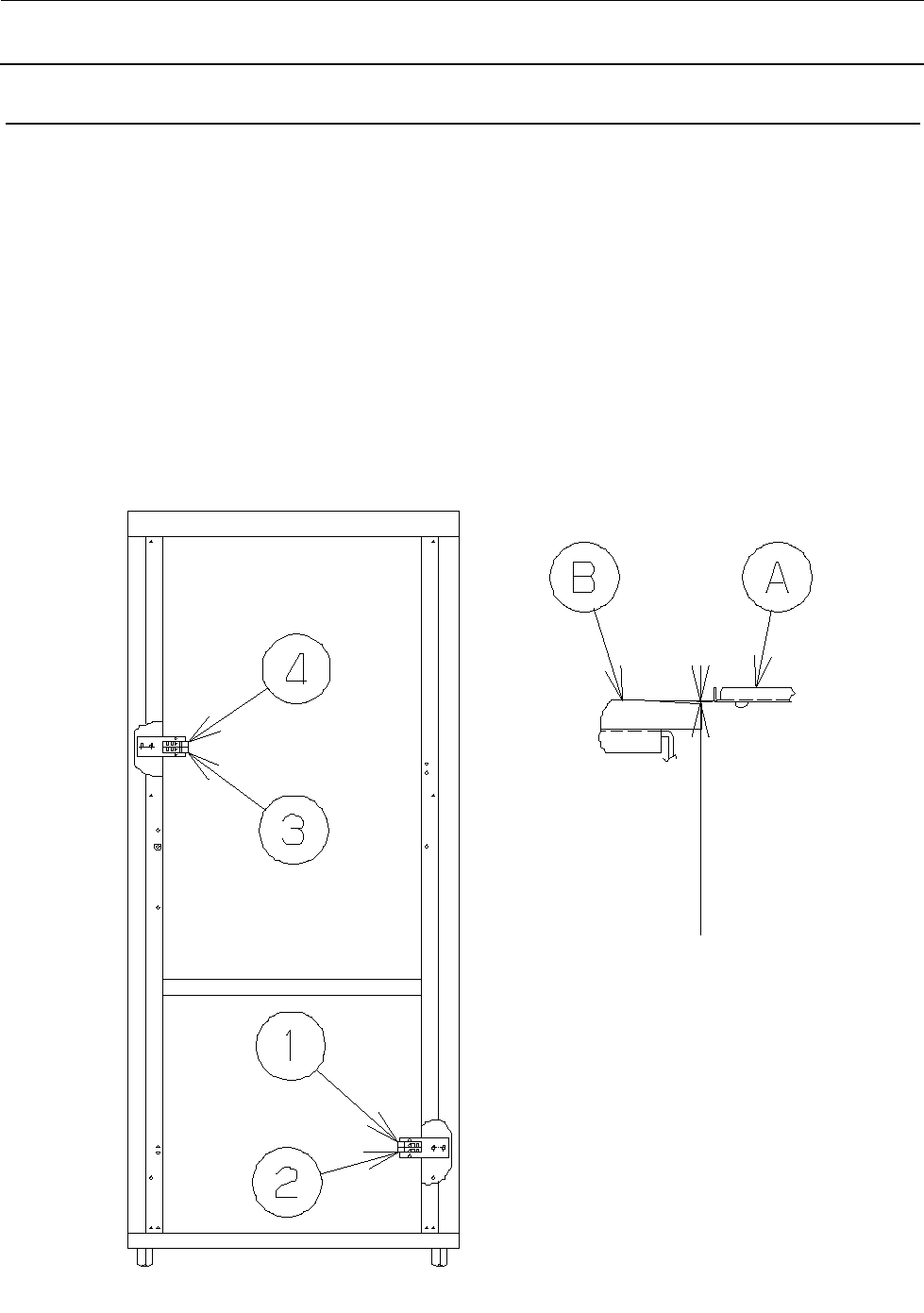
4-2. Z 轴原点、负向极限传感器的更换及调整
请以调试模式的“10. Z JOG”将 Z 轴移动到看得見传感器的位置,更换传感器。
更换传感器后,仅原点传感器需要进行下述检查。
初始化后,以调试模式的“19. XYZ ADJ”进行托盘座板拉出高度的确认。层数 1 是副侧(上段)第
1 层的拉出高度,层数 16 是主侧(下段)第 1 层的拉出高度。
请确认托盘座板 A 与 Y 轨道 B 的空隙为-0.2~0.2。
如有偏离,请更改参数进行调整。
①ZM 原点传感器(货号:HD001710000)
②ZM 负向极限检知(货号:HD001700000)
③ZS 原点传感器(货号:HD001710000)
④ZS 负向极限检知(货号:HD001700000)
−0.2
~
0.2
维修调整要领书
4-3
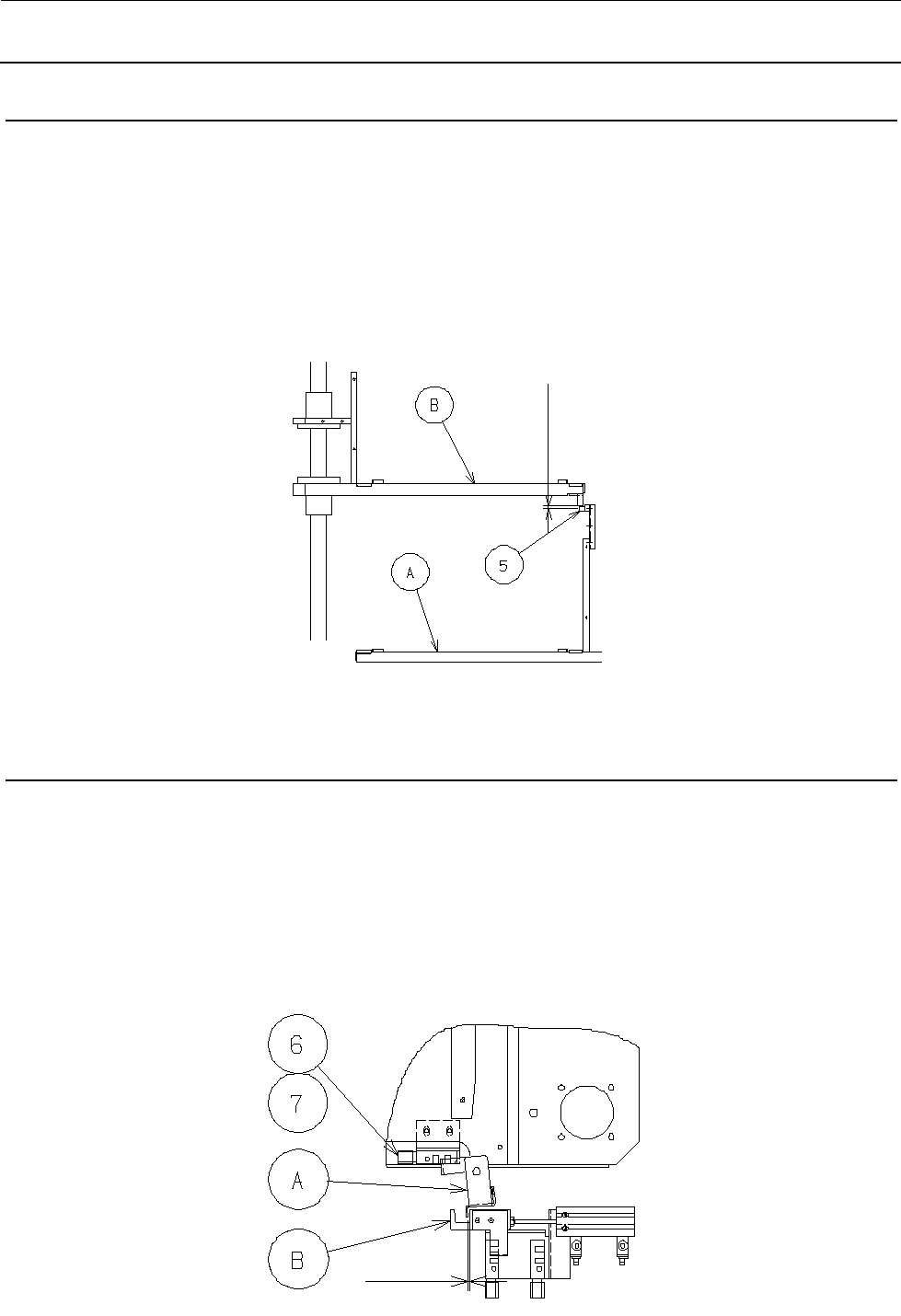
4-3. ZM 正向极限检知传感器的更换及调整
ZM 正向极限检知传感器⑤安装在下段叠盘箱底座 A 上,请更换。
参考:下段叠盘箱底座 A 或上段叠盘箱底座 B 最大限度地移动时,距 ZM 正向极限检知传感器⑤的尺
寸为 5mm。
确认方法是,如以调试模式的“17.Z Unit”将上段叠盘箱移动到第 1 层,将是下图所示的位置关系。
⑤ZM 正向极限检知传感器(货号:HD001700000)
4-4. 叠盘箱安装传感器的更换及调整
安装传感器位于叠盘箱底座的内侧。(安装好叠盘箱时闸门所在的部分)
请更换安装传感器并进行以下检查。
安装叠盘箱后请确认:用手打开闸门时,在闸门 A 与交换装置 B 之间存在 1mm 左右空隙的状态下安
装传感器会 OFF。(在安装传感器 ON 的状态下,闸门不应该碰到交换装置。)
⑥叠盘箱 M 安装传感器(货号:HD001710000)
⑦叠盘箱 S 安装传感器(货号:HD001710000)
1mm
5 mm