SM471_Introduction(Chi_Ver1).pdf - 第38页
1-4 Samsung Componen t Placer SM471 Introduction 1.2. 可适用部品 1.2.1. 头部及图象识别系统的构成 与需要贴装的部品相关 的头部及图象识别系统的构成如下 表 表 1.1 Head 及 Vision 识别系统的构成 备 注 悬臂 1( 正面 ) 与悬臂 2( 背面 ) 各自由 10 个贴装头与 5 个视觉相机 (FOV 24mm) 构成。 一个 视觉相机负责两个贴装头。 详细…

1-3
设备的特点及部品规格
配置了可进行高速串口通讯的高性能硬件,增强了控制单元的可靠度,大幅提
高了元件识别速度与贴装速度。
可基本安装电动式供料器,通过供料器自动调节、拾取位置自动调节等功能改
善了0603 等微小元件的同时拾取率。
在贴装头两侧安装了基准相机,可以针对0603等供料器的所有领域进行料槽示
教(基准相机基本安装1台,可以通过选项把安装数量增加到2台)。
具备了各种照明系,可以针对CSP、LED、Connector等较难识别的特殊IC进行作
业。
为了减少耗气量,可以通过选项方式在设备内部安装真空泵。
使用最新的低发热量 Quad Core CPU,提高了控制器的可靠度并利用超高速通讯
提升了生产性。
利用超高速串口PCI-Exp通讯大幅减少了轴控制板的信号线,防止电缆及连接器
接触不良所造成的故障,提高了设备的可靠度。
在上端支撑台(Backup Table)适用连杆(Linkage) 机构,可精密地维持水平度,从
而提高了夹持(Clamping)可靠度。
适用双通道(Dual Lane),实现了基于PCB 特性的生产模式,可实现PCB Loading
Time “Zero”。
使用Mega Pixel Flying相机,可以针对包括0402元件在内的Micro CSP等各种IC
元件进行作业。
1.1.2. 软件特征
改善贴装序列,提高贴装速度。
改善图像软件,提高部件识别速度、对应力及信赖性。
图像拍摄及传送速度最佳化,缩短图像识别,提高总的部件识别速度。
改善分割识别算法,扩大对大型部件的对应范围。 (FOV 45mm 适用时, 最大
可对应□55mm部件)
改善部件识别算法(algorithm),提高了部件识别信赖性及检查功能。
设备的OS适用了Microsoft 的Embedded Windows XP。支持多种语言。
用户界面MMI强化了用户的方便性功能。
强化了用户权限设置功能
增加了生产监控及生产报告书输出功能。
强化了用户文件管理功能。
提供了与设备联动的自动维护管理功能。
1-4
Samsung Component Placer SM471 Introduction
1.2. 可适用部品
1.2.1. 头部及图象识别系统的构成
与需要贴装的部品相关的头部及图象识别系统的构成如下表
表
1.1 Head
及
Vision
识别系统的构成
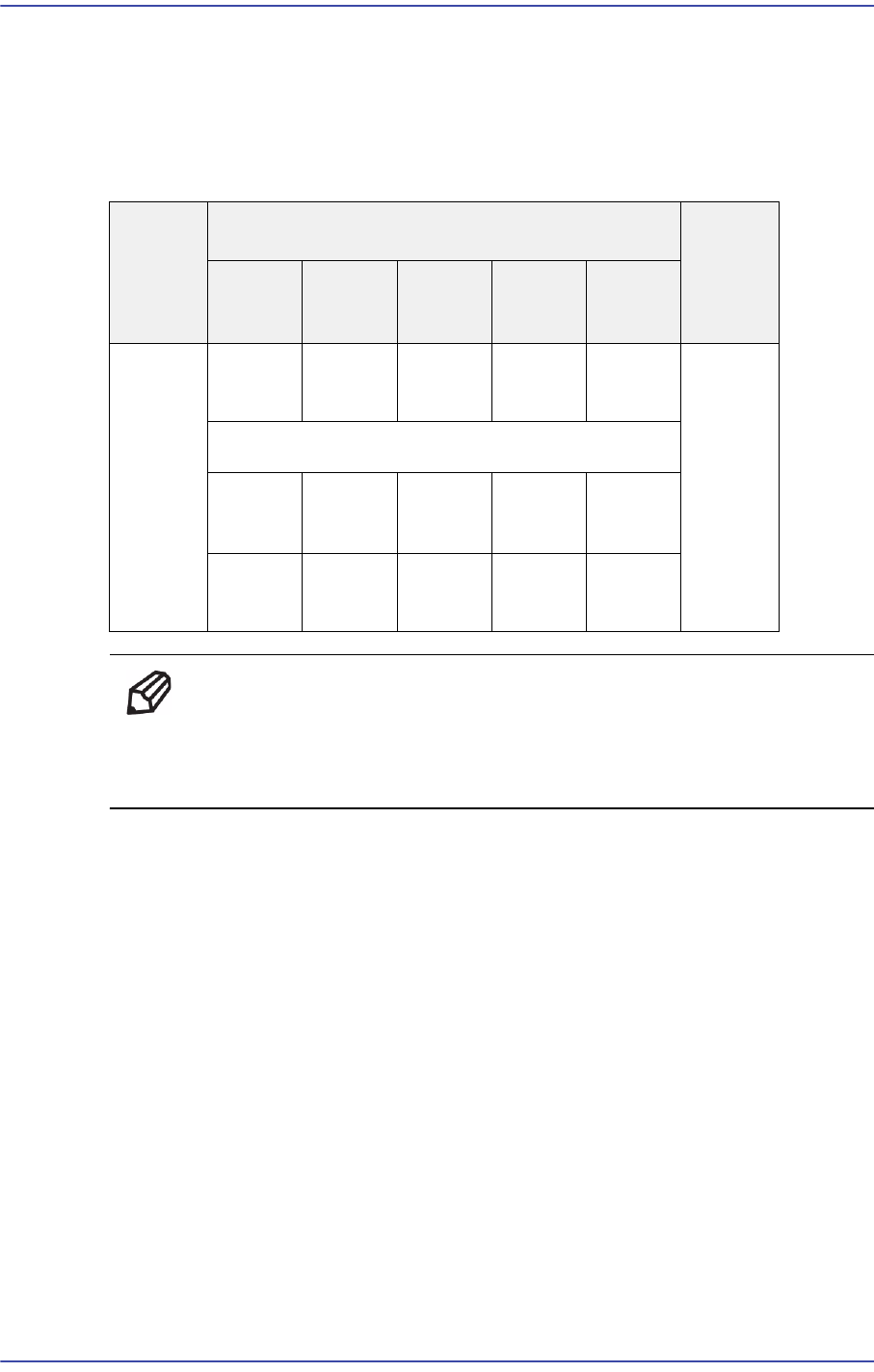
备 注 悬臂1(正面)与悬臂 2(背面 ) 各自由10个贴装头与5个视觉相机
(FOV 24mm)构成。一个视觉相机负责两个贴装头。详细内容请
参阅“1.2.2. 可适用的元件规格”。
区 分
Gantry1 Head 结 构
Vision
System
Head 1
Head 2
Head 4
Head 5
Head 6
Head 7
Head 7
Head 8
Head 9
Head 10
SM471
24mm
Vision
24mm
Vision
24mm
Vision
24mm
Vision
24mm
Vision
FOV 24 /
Mega
Pixel
Gantry2 Head 结 构
Head 11
Head 12
Head 13
Head 14
Head 15
Head 16
Head 17
Head 18
Head 19
Head 20
24mm
Vision
24mm
Vision
24mm
Vision
24mm
Vision
24mm
Vision
1-5
设备的特点及部品规格
1.2.2. 可适用部品的规格
1.2.2.1. Flying Vision识别系统
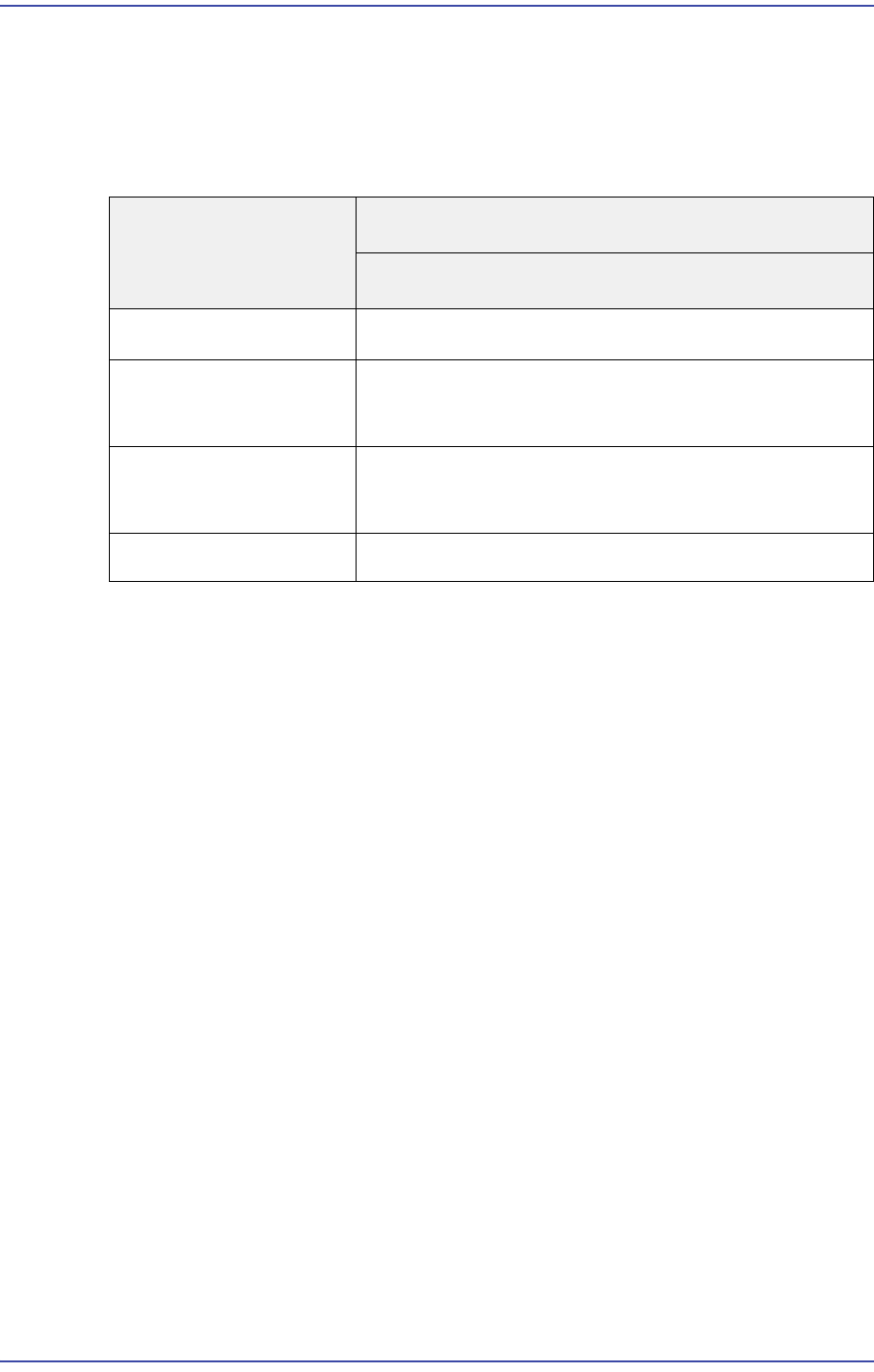
以下表格是有关本设备中适用的部品规格的规定,主要适用于一般的部品。
表
1.1
可适用部品的规格
(Vision
识别系统
)
区 分
Components
FOV 24mm Mega Pixel Camera
Chips
0402 ~ □14mm
IC, Connector
□14mm 以下,
Lead Pitch : 0.5mm 以上
BGA, CSP
□14mm 以下, ,
Ball Pitch : 0.5mm 以上
Maximum Height 12mm