SM471_Introduction(Chi_Ver1).pdf - 第49页
2-7 设备的规格 2.4. XY- 轴的规格 表 2.1 . XY- 轴的规格 区 分 规 格 备 注 机械装置 X 轴 : AC Servo + Ball Screw Y 轴 : AC Servo + Ball Screw (T win) 750 W 1000 W * 2 减速比 X 轴 1:1 , Y 轴 1:1 反复精度 ± 0.01 mm 移动精度 X 轴 : 3.0 mm/pulse Y 轴 : 3.0 mm/pulse X…

2-6
Samsung Component Placer SM471 Introduction
备注 为了改善性能,变更设备的规格时,不经另行通知。
注 意 USB Memory 使用时的注意事项
1. 请勿在设备中使用Memory Card Reader。
2. 请勿在设备中使用MP3, Digital Camera, PDA等 USB Interface
Device。
3. 请勿以充电用途使用设备的USB Port。
4. 请勿在强静电或容易发生电气Noise 的环境及高温潮湿环境
中使用或保管USB Memory。
5. 请注意USB Memory的接触面粘有灰尘或污渍。如果粘上污
渍请使用柔软的布块擦拭。
6. 对以下USB Memory使用引起的问题本公司不承担一切责任
敬请留意。
因感染病毒引发的问题。
因长期使用导致的数据消失。
因非正常使用导致的保存数据消失。
2-7
设备的规格
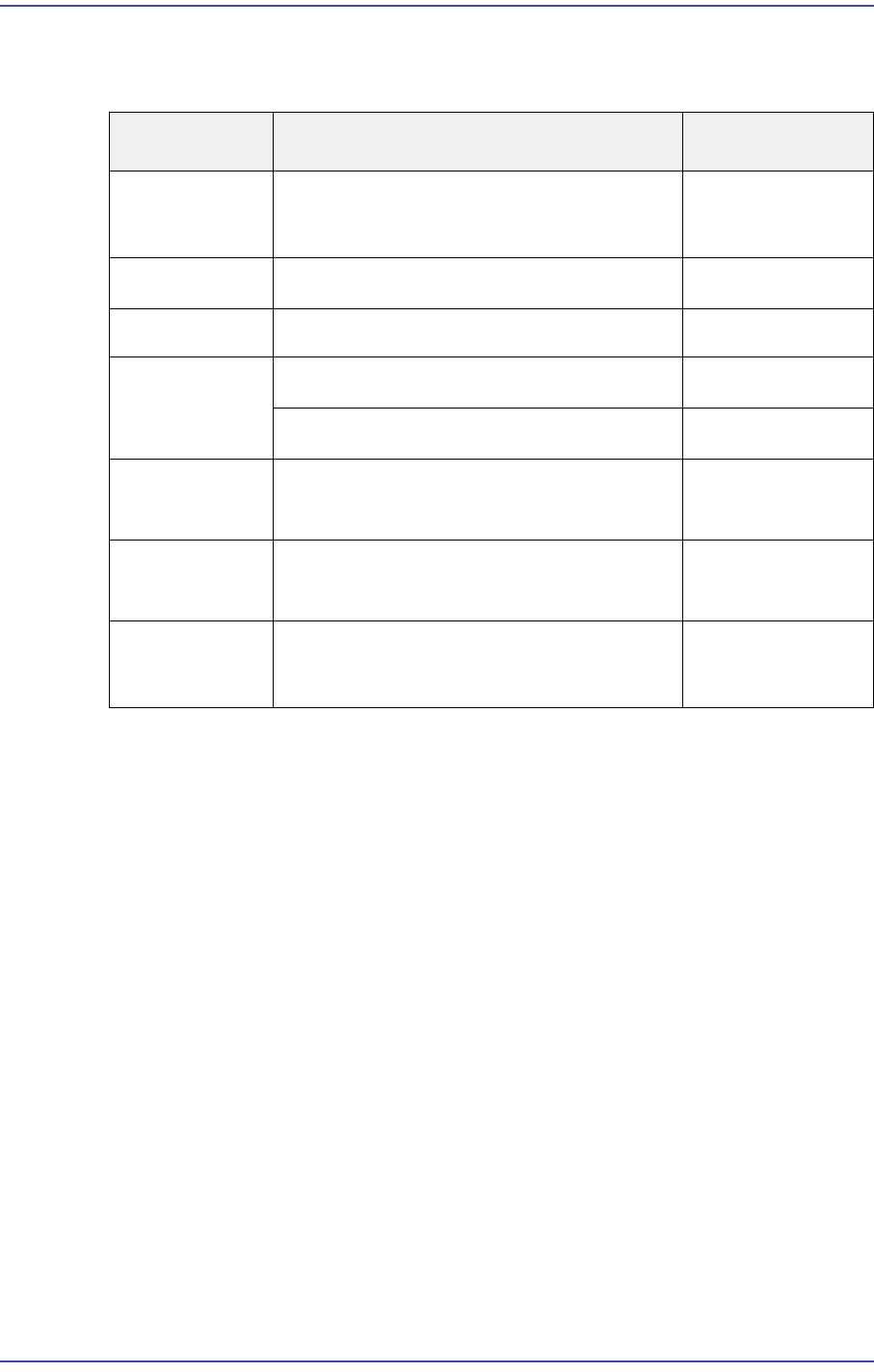
2.4. XY-轴的规格
表
2.1 . XY-
轴的规格
区 分 规 格 备 注
机械装置
X轴 : AC Servo + Ball Screw
Y轴 : AC Servo + Ball Screw (Twin)
750 W
1000 W * 2
减速比
X轴 1:1 , Y轴 1:1
反复精度
± 0.01 mm
移动精度
X轴 : 3.0 mm/pulse
Y轴 : 3.0 mm/pulse
X-轴的范围
763.6 mm
759.5 mm
H/W Limit
S/W Limit
Y- 轴的范围
778.3 mm
773.5 mm
H/W Limit
S/W Limit
加减速模式
29,400 m/s2
29,400 m/s2
X轴
Y轴
2-8
Samsung Component Placer SM471 Introduction
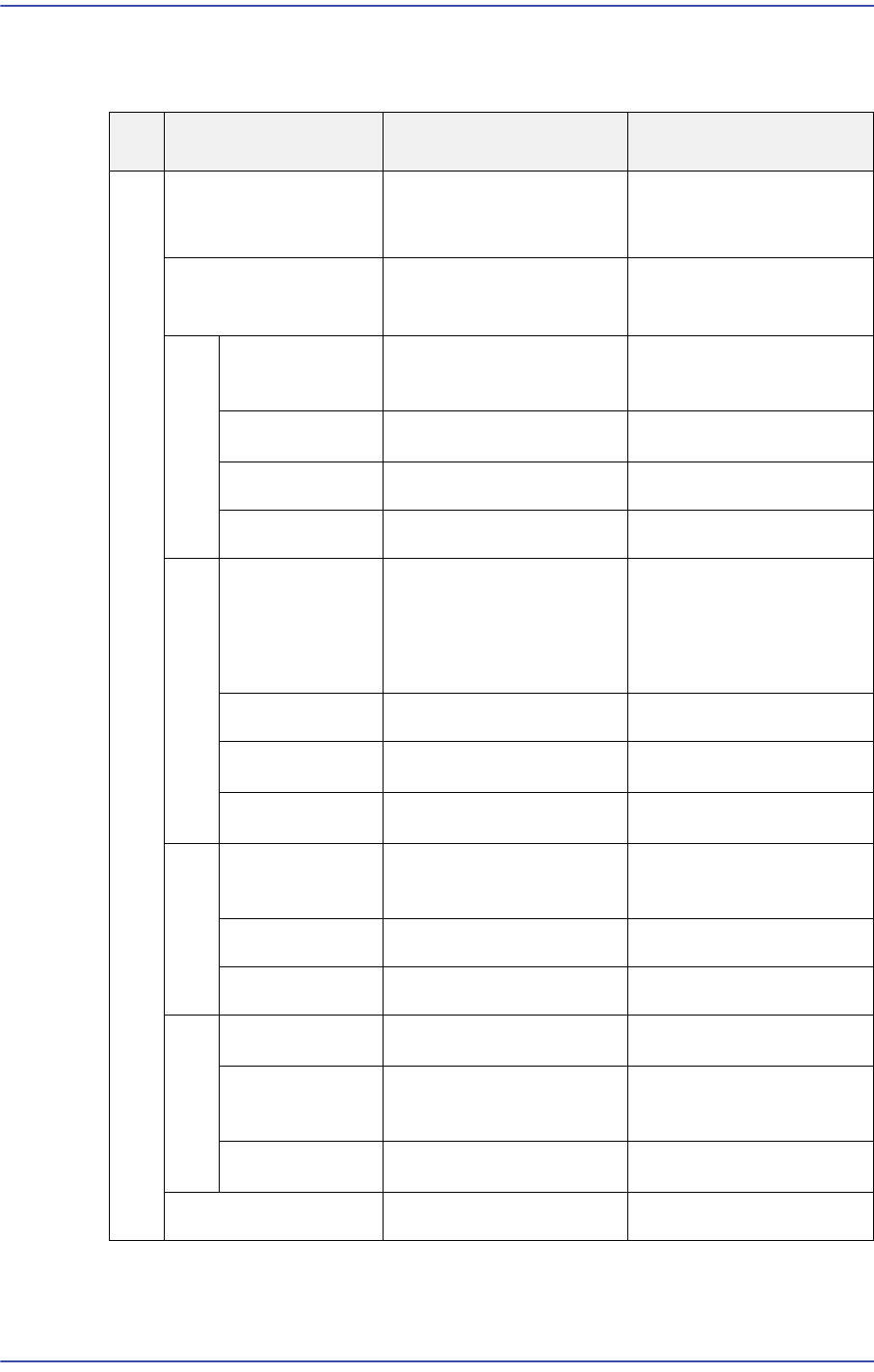
2.5. Head的规格
表
2.1 Head
的规格
区分
项 目 规 格 备 注
Head
SPINDLE
Gantry1(正面) : 10个
Gantry2(背面) : 10个
4 Nozzle 选项
Head 的间距 15 mm
8mm, 12mm, 16mm 吸
着可能的程度
Z轴
机械装置
AC Servo motor + Belt &
LM
Motor: 20W
动作范围
最大 88 mm
Stopper to stopper
移动精度
0.003 mm/pulse
反复精度
± 0.01 mm
R轴
机械装置
Micro stepping motor +
Belt & Pulley
Head 1/2, 3/4, 5/6, 7/8,
9/10 Pair
Head 11/12, 13/14, 15/
16, 17/18, 19/20 Pair
动作范围
Unlimited
移动精度
0.018 °/pulse
反复精度
± 0.05 °
Swing Mirror
机械装置
AC servo motor + Belt &
Cam
Motor: 50 W
移动精度
0.018˚/pulse
反复精度
±0.02˚
Nozzle holder
Clamping 方法
Taper clamp + Ball
Clamping ball
的数
3 个
Cushion
没有Cushion Nozzle Cushion 设置
识别方法
Fly Camera (CCD)
安装数码照明装置