SM471_Introduction(Chi_Ver1).pdf - 第50页
2-8 Samsung Componen t Placer SM471 Introduction 2.5. Head 的规格 表 2.1 Head 的规格 区分 项 目 规 格 备 注 Head SPINDLE Gantry1( 正面 ) : 10 个 Gantry2( 背面 ) : 10 个 4 Nozzle 选项 Head 的间距 15 mm 8mm, 12mm, 16mm 吸 着可能的程度 Z 轴 机械装置 AC Servo mo…
2-7
设备的规格
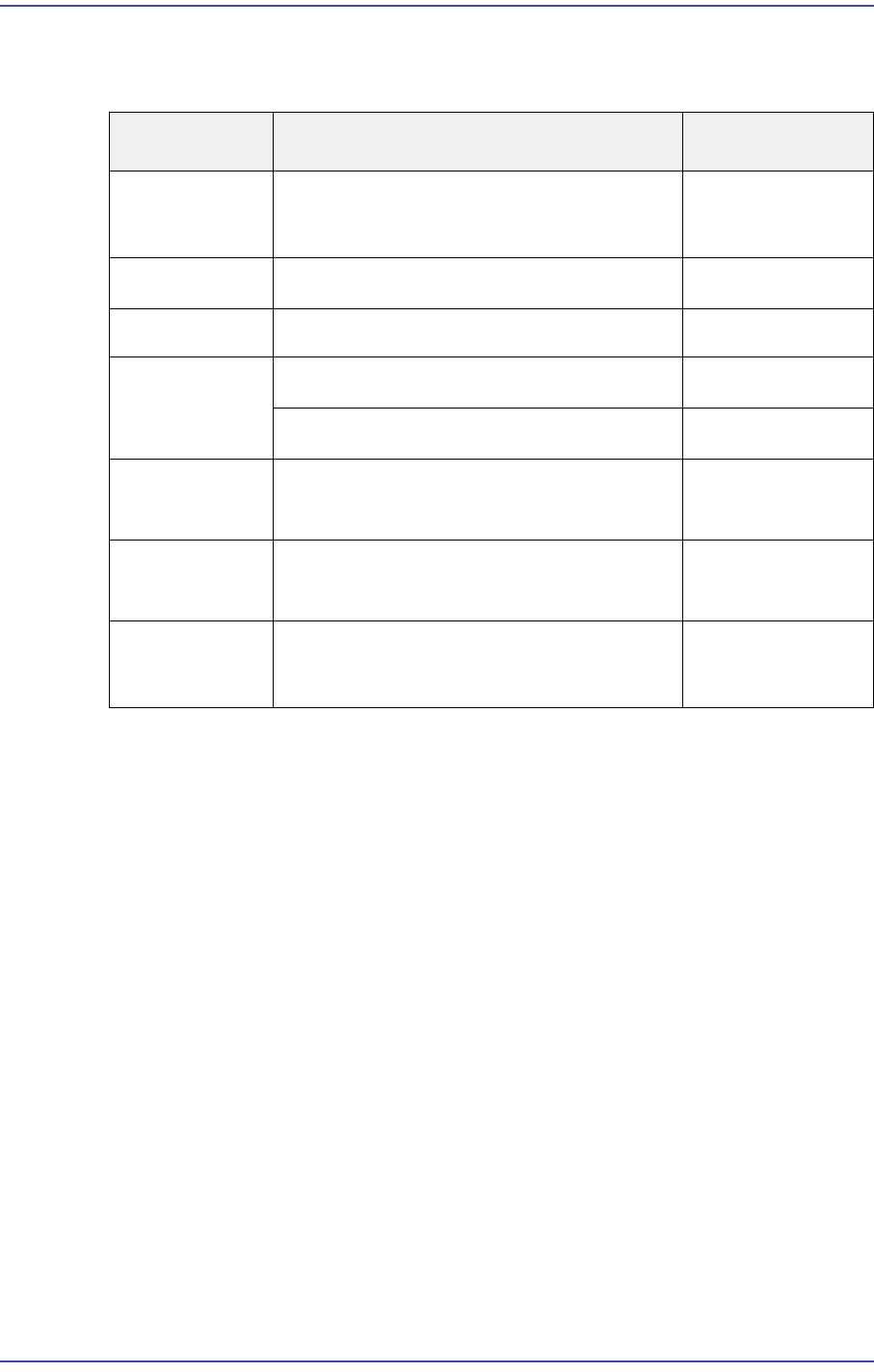
2.4. XY-轴的规格
表
2.1 . XY-
轴的规格
区 分 规 格 备 注
机械装置
X轴 : AC Servo + Ball Screw
Y轴 : AC Servo + Ball Screw (Twin)
750 W
1000 W * 2
减速比
X轴 1:1 , Y轴 1:1
反复精度
± 0.01 mm
移动精度
X轴 : 3.0 mm/pulse
Y轴 : 3.0 mm/pulse
X-轴的范围
763.6 mm
759.5 mm
H/W Limit
S/W Limit
Y- 轴的范围
778.3 mm
773.5 mm
H/W Limit
S/W Limit
加减速模式
29,400 m/s2
29,400 m/s2
X轴
Y轴
2-8
Samsung Component Placer SM471 Introduction
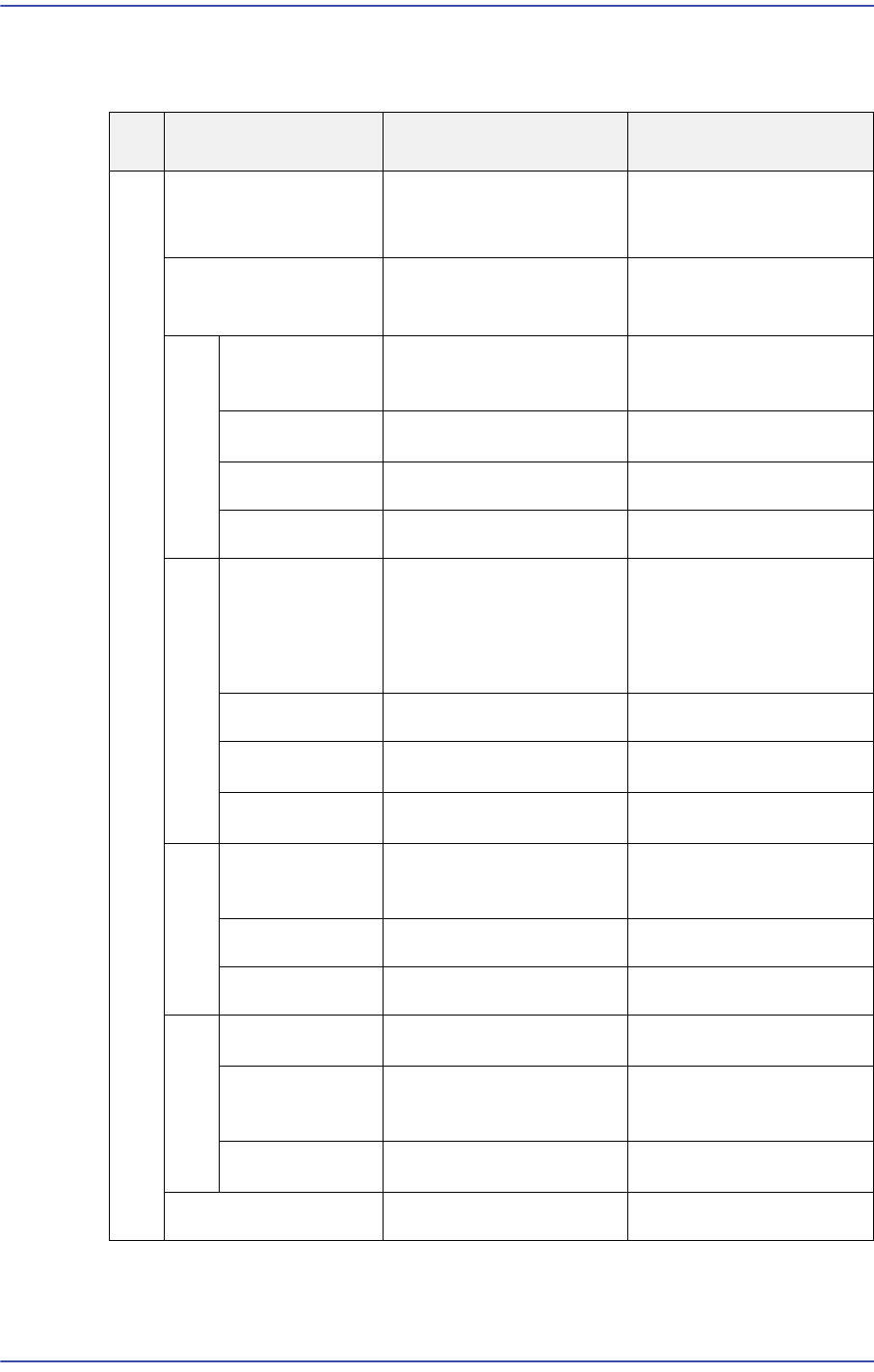
2.5. Head的规格
表
2.1 Head
的规格
区分
项 目 规 格 备 注
Head
SPINDLE
Gantry1(正面) : 10个
Gantry2(背面) : 10个
4 Nozzle 选项
Head 的间距 15 mm
8mm, 12mm, 16mm 吸
着可能的程度
Z轴
机械装置
AC Servo motor + Belt &
LM
Motor: 20W
动作范围
最大 88 mm
Stopper to stopper
移动精度
0.003 mm/pulse
反复精度
± 0.01 mm
R轴
机械装置
Micro stepping motor +
Belt & Pulley
Head 1/2, 3/4, 5/6, 7/8,
9/10 Pair
Head 11/12, 13/14, 15/
16, 17/18, 19/20 Pair
动作范围
Unlimited
移动精度
0.018 °/pulse
反复精度
± 0.05 °
Swing Mirror
机械装置
AC servo motor + Belt &
Cam
Motor: 50 W
移动精度
0.018˚/pulse
反复精度
±0.02˚
Nozzle holder
Clamping 方法
Taper clamp + Ball
Clamping ball
的数
3 个
Cushion
没有Cushion Nozzle Cushion 设置
识别方法
Fly Camera (CCD)
安装数码照明装置
2-9
设备的规格
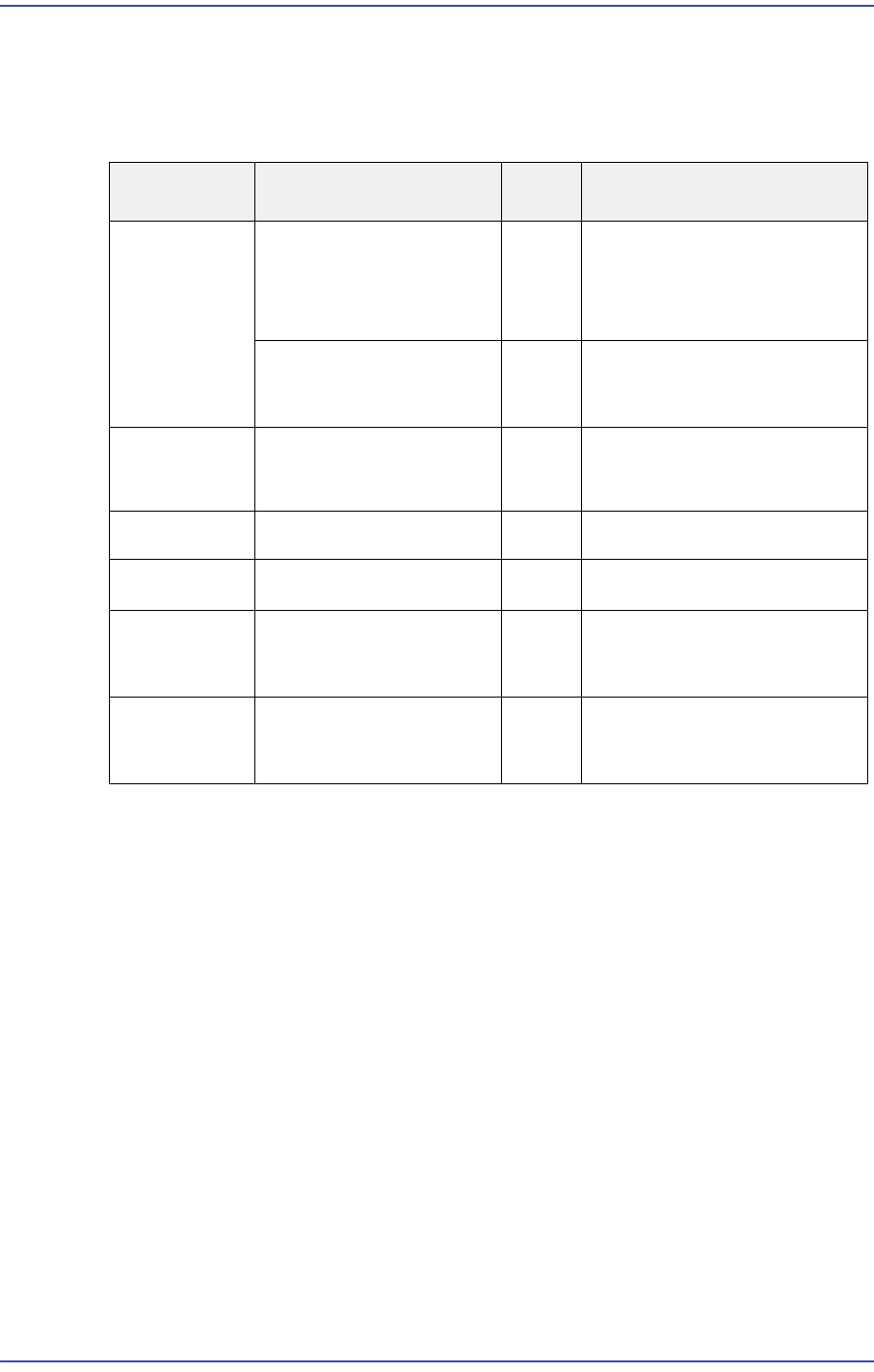
2.6. PCB 规格
2.6.1. PCB的规格,弯曲允许误差
O: 标准, ◎: Factory Option, X: 适用不可
表
2.1 PCB
规格
区分
规 格
SM471
备 注
PCB 的
最大尺寸
(L)510mm x (W)460mm
(L)460mm x (W)250mm
O
Single Lane
超(L)460mm: Buffer 适用不可
Dual Lane
(L)610mm x (W)460mm
(L)610mm x (W)250mm
◎
Single Lane
Dual Lane
PCB 的
最小尺寸
(L)50mm x (W)40mm
O
厚度
0.38 mm ~ 4.2 mm
移送可能PCB
2.0 Kg
允许弯曲度
公差
(上):0.5mm
(下):1.5mm
部件上下对应
(上):12mm
(下):30mm
根据支架的位置而可能有所
差异