SM471_Introduction(Chi_Ver1).pdf - 第79页
6-1 Module Function 第 6 章 . Module Function 6.1. Head 组件 ( Head Assembly ) 6.1.1. Head 组件 图 6.1 Head Assembly 1: Air Module 2: Fiducial Camera 3: Mirr or Axis motor 4: Fly Camera 5: R Axis motor 6: Z Axis motor 吸头组件 ( …
5-6
Samsung Component Placer SM471 Introduction
5.4.2. The Sensor Part List
表
5.1 The taxble of sensor part list
No PART NO PART NAME TYPE
Q’TY
REMARK
1 J3212022A PHOTO_SENSOR EE-SX674 6 X/Y-AXIS HOME/LIMIT
2 J3212027A Z-HOME_SENSOR 10
3 J32121021A R-HOME_SENSOR 1
4 J90831135A ANC SENSOR SM33-CV010 1 ANC SENSOR OPEN / CLOSE
5 J90831287B FEEDER UNLOCK SENSOR SM411-
CS034-3
4 FEEDER UNLOCK CHECK
6 J3211048A PHOTO SENSOR E3S-LS3N 4 PCB DETECTING (Work Station)
7 J3212004A PHOTO SENSOR EE-SX672A 5 AUTO PCB WIDTH-HOME/LIMIT
8 J3212027A PHOTO_SENSOR 5
9 J34091002A SAFETY DOOR SWITCH D4NS-2BF 2 CHECK DOOR OPEN
10 J3212002A VACUUM SENSOR 4
11 J90831139A FRONT AREA SENSOR SM33-CV016 1 SAFETY SENSOR
J90831141A REAR AREA SM33-CV018 1 SAFETY SENSOR
6-1
Module Function
第6章. Module Function
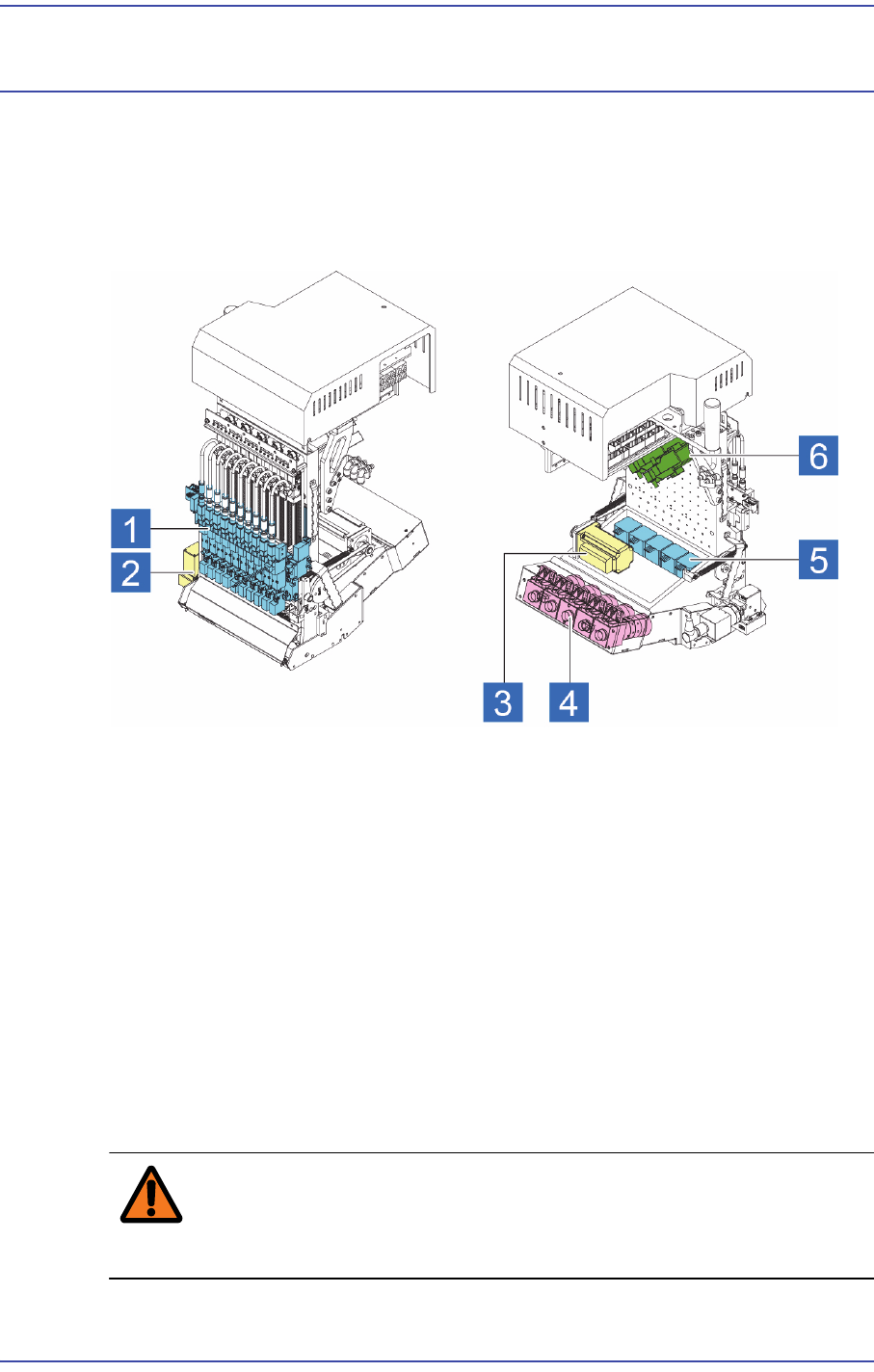
6.1. Head组件(Head Assembly)
6.1.1. Head组件
图
6.1 Head Assembly
1: Air Module
2: Fiducial Camera
3: Mirror Axis motor
4: Fly Camera
5: R Axis motor
6: Z Axis motor
吸头组件(Head Assembly)用一个模块制作,此模块由10个轴单元(Spindle
Units)来构成。
每个Spindle有各自的Flying Vision Camera,因为它采用了非接触式部品排列方
式(中心定位方式),使得设备运行操作更加稳定。为了从带式喂料器(Tape
Feeder)同时Pickup所有Spindle,安 装 Spindle 时每个 Spindle之间留有间隙
(15mm)。
警 告 当吸头的Z轴下降时,将手伸到吸头下面可能有受伤的危险。
设备运行时不可以将手伸到吸头下面。
6-2
Samsung Component Placer SM471 Introduction
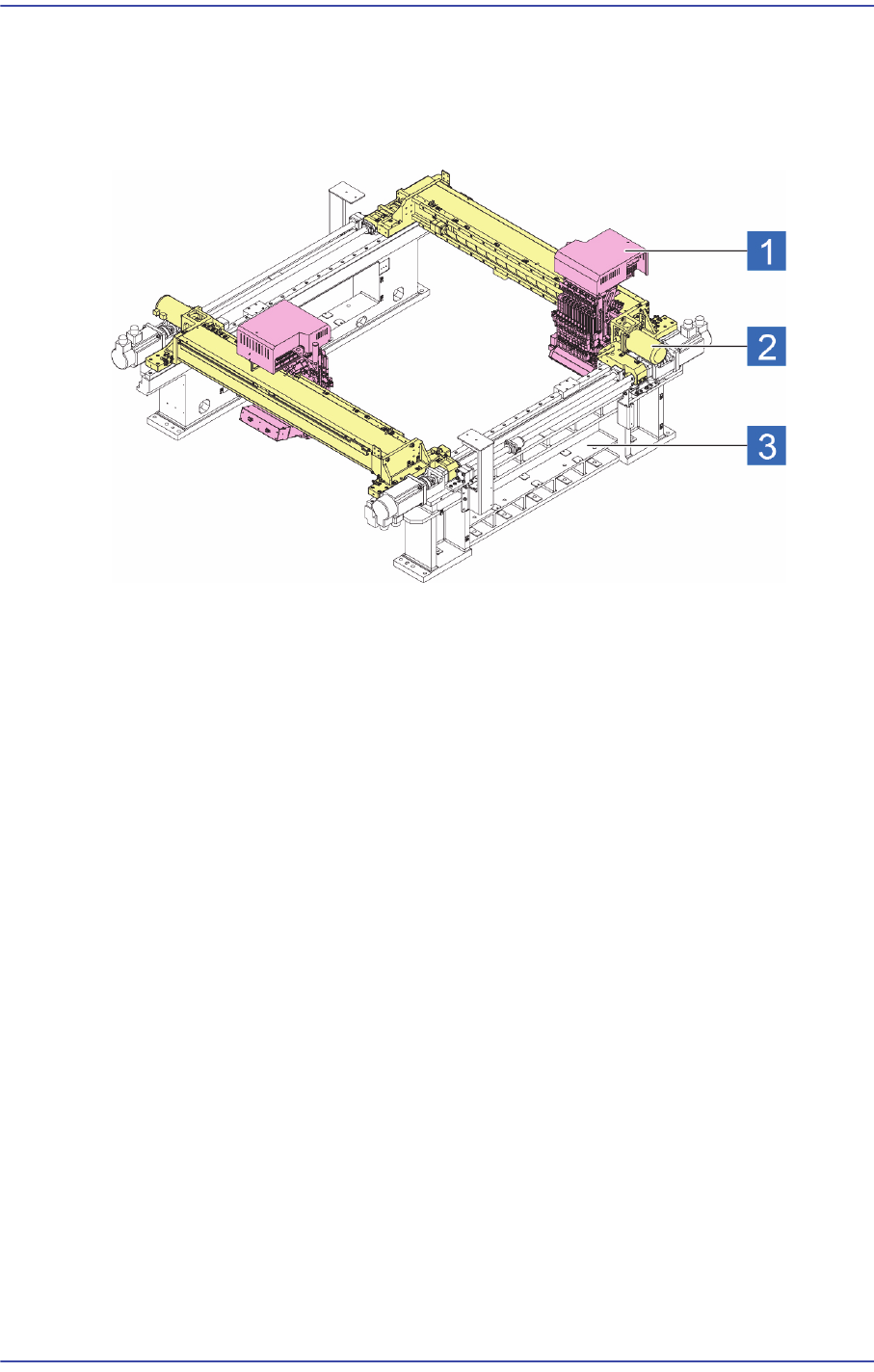
6.2. X-Y 框架部分
6.2.1. 结构
图
6.2 X-Y
框架部分
1: Head
2: X Frame
3: Y Frame
6.3. PCB Transport System
6.3.1. 构成
PCB传送系统负责输送来自前段设备的基板,为贴装元件定位并固定基板。 SM471
有两个Work Conveyor Lane,微 型 PCB可同时在前后工作领域装载两个PCB进行贴
装。
由调进前一个装备投入的PCB分配成前后Work Conveyor Lane的Entry Shuttle
Conveyor(St00),固 定 PCB 完成贴装操作的 Work Conveyor及从两个 Lane 收集已操
作PCB的 Exit Shuttle Conveyor(St02)两列三段构成,可最大限度地缩短 PCB交替时
间,采取了 PCB底面固定方式,提高了 PCB扁平度。
可以适应从小型 PCB(40.0mm×50.0mm)到大型 PCB Transport System PCB
(510.0mm×460.0mm) 的比较广泛的范围。 请参考 “2.6.1 PCB的规格,弯曲允许误
差“ 。 PCB 传送系统的构成分为如下。