3OM-1218-005.pdf - 第290页
6 - 66 041 1-001 [ 1 2] [ 1 2] [ 1 2] [ 1 2] [ 1 2] 线路板定位 线路板定位 线路板定位 线路板定位 线路板定位 是线路板定位方法、 Y 夹板定时器 [ 秒 ] 、 Z 夹板定时器 [ 秒 ] 、 传送带缓冲设定、线路板检出 OFF 延迟时间 [ 秒 ] 等的线路板 定位部的设定。 定位方法 定位方法 定位方法 定位方法 定位方法 设定线路板的运送、定位顺序。 从 “ 线路板传送优先 ”…
6-65041 1-001
[ 11][ 11]
[ 11][ 11]
[ 11]
供给传送带供给传送带
供给传送带供给传送带
供给传送带
时间时间
时间时间
时间
11
11
1
[[
[[
[
秒秒
秒秒
秒
]]
]]
]
设定与前工序的线路板输送中的供给传送带的动作限制时
间。
计算供给传送带动作的时间,使用于线路板拉出异常的监
视。
设定与前工序装置的线路板输送运送所需要的时间加上 2 秒
左右的数据。
时间时间
时间时间
时间
22
22
2
[[
[[
[
秒秒
秒秒
秒
]]
]]
]
设定传送带运送装置内线路板时供给传送带的动作限制时
间。
计算供给传送带动作的时间,使用于线路板拉出异常的监
视。
缓冲设定缓冲设定
缓冲设定缓冲设定
缓冲设定
选择供给传送带上的线路板 “ 使用 ” 、“ 不使用 ” 缓冲。
制动阀设定制动阀设定
制动阀设定制动阀设定
制动阀设定
选择 “ 使用 ” 或 “ 不使用 ” 制动阀设定。
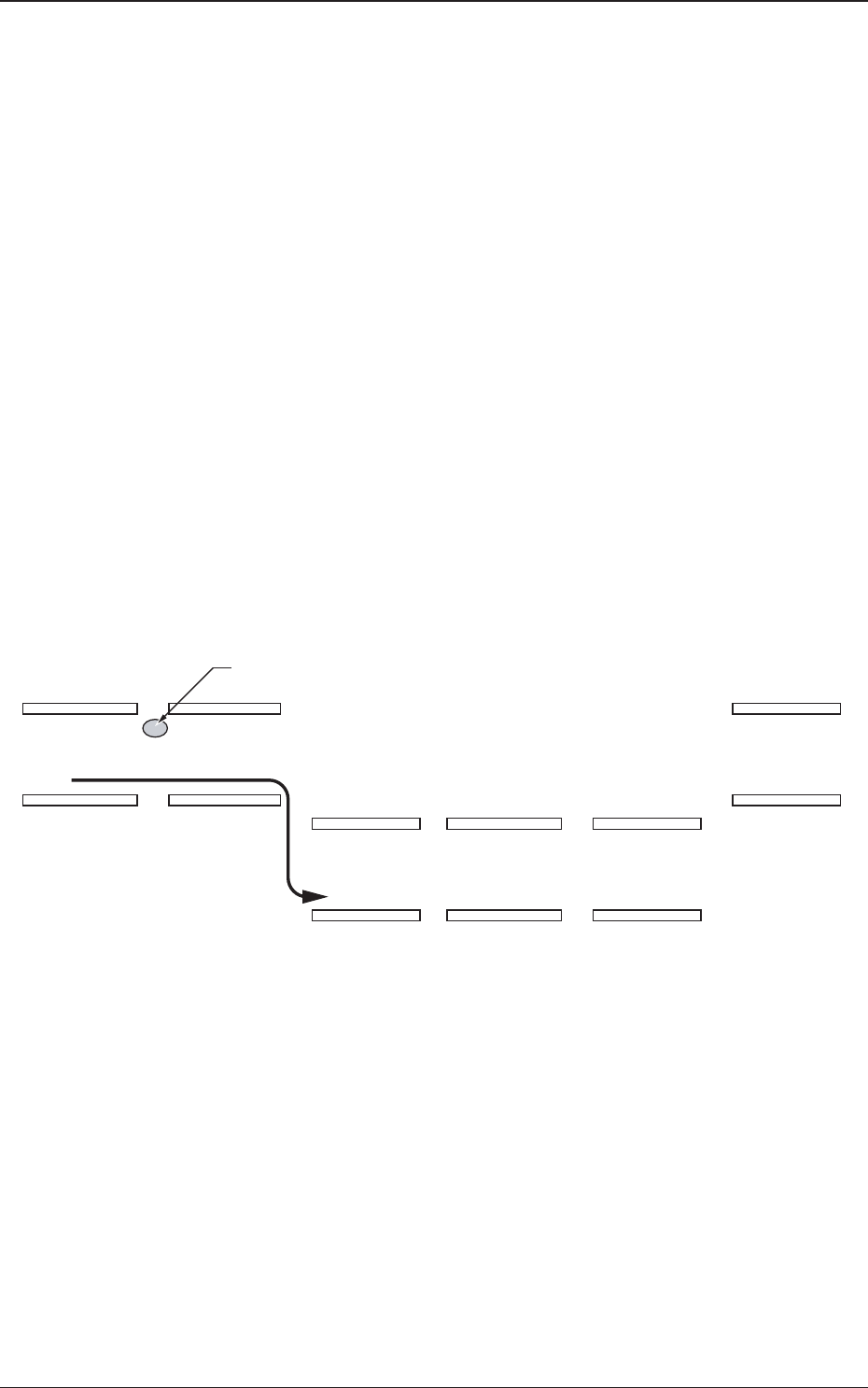
Fig.3F49Fig.3F49
Fig.3F49Fig.3F49
Fig.3F49
线路板跨过前工序输出传送带和供给传送带之间时,若供
给传送带移动到定位传送带位置,就会夹住线路板使其破
损。
装置处在取回线路板状态以外时,上升制动阀,线路板无
法从前工序进入。
供给传送带制动阀供给传送带制动阀
供给传送带制动阀供给传送带制动阀
供给传送带制动阀
供给传送带供给传送带
供给传送带供给传送带
供给传送带
前工序前工序
前工序前工序
前工序
输出传送带输出传送带
输出传送带输出传送带
输出传送带
定位定位
定位定位
定位
传送带传送带
传送带传送带
传送带
11
11
1
定位定位
定位定位
定位
传送带传送带
传送带传送带
传送带
22
22
2
输出传送带输出传送带
输出传送带输出传送带
输出传送带
2.2 2.2
2.2 2.2
2.2
运行参数运行参数
运行参数运行参数
运行参数

6-66041 1-001
[ 1 2][ 1 2]
[ 1 2][ 1 2]
[ 1 2]
线路板定位线路板定位
线路板定位线路板定位
线路板定位
是线路板定位方法、Y 夹板定时器[ 秒] 、Z 夹板定时器[ 秒] 、
传送带缓冲设定、线路板检出 OFF 延迟时间[ 秒] 等的线路板
定位部的设定。
定位方法定位方法
定位方法定位方法
定位方法
设定线路板的运送、定位顺序。
从 “ 线路板传送优先 ” 、“ 贴装坐标优先 ” 中选择。
线路板传送优先线路板传送优先
线路板传送优先线路板传送优先
线路板传送优先 : 指定定位用的线路板传感器位置的
相反侧为线路板贴装坐标基准时选
择。
贴装坐标优先贴装坐标优先
贴装坐标优先贴装坐标优先
贴装坐标优先 : 指定线路板传感器侧为贴装坐标基
准时选择。
2.2 2.2
2.2 2.2
2.2
运行参数运行参数
运行参数运行参数
运行参数
6-67041 1-001
YY
YY
Y
夹板定时器夹板定时器
夹板定时器夹板定时器
夹板定时器
[[
[[
[
秒秒
秒秒
秒
]]
]]
]
设定对准 Y 方向( 线路板横方向的定位) 的 Y 推杆的送出及返
回动作时间( 两者相同) 。
因为 Y 推杆的移动距离短,不带送出及返回的传感器。因此
用软件定时器规定动作的时间。
• 输入确实完成对准 Y 方向动作的时间。
• 使用于夹板 ON、OFF 时的软件的动作定时器。
• 为避免对准 Y 方向时的冲击,调整 Y 推杆的送出及返回速
度时有必要变更设定。
该值太大就会使线路板定位及解除时间过长,因此请注意。
ZZ
ZZ
Z
夹板定时器夹板定时器
夹板定时器夹板定时器
夹板定时器
[[
[[
[
秒秒
秒秒
秒
]]
]]
]
设定 Z 夹板定时器的时间。
使用于夹板 ON、OFF 时的软件的动作定时器。
传送带缓冲设定传送带缓冲设定
传送带缓冲设定传送带缓冲设定
传送带缓冲设定
选择定位传送带上的线路板 “ 使用 ” 、“ 不使用 ” 缓冲。
“ 线路板传送优先 ” 中,线路板尺寸不足 150mm 时有效。
Note
2.2 2.2
2.2 2.2
2.2
运行参数运行参数
运行参数运行参数
运行参数