CP45编程操作.pdf - 第2页
基板程式編輯 *Place o rigin=Dev ice要選Mov e cam再使用遙控器調整到正確的位置後要按Get才會存檔 + + 不用 相機留位置 auto 停在 mark 位 置 座標原點設定 吸嘴底部到基板高 軌道夾基板方式 基板檔板控 Back Up Table 上下控制 不夾基板 基板送出 基板送進 基板尺寸設定 軌道調整 客戶名稱 基板名稱 連板編輯 Mark編輯 壞板偵測 Mark編輯 好板偵測 Mark編輯
程式編輯主畫面
基板程式編輯
零件程式編輯
零件座標編輯
餵料器程式編輯
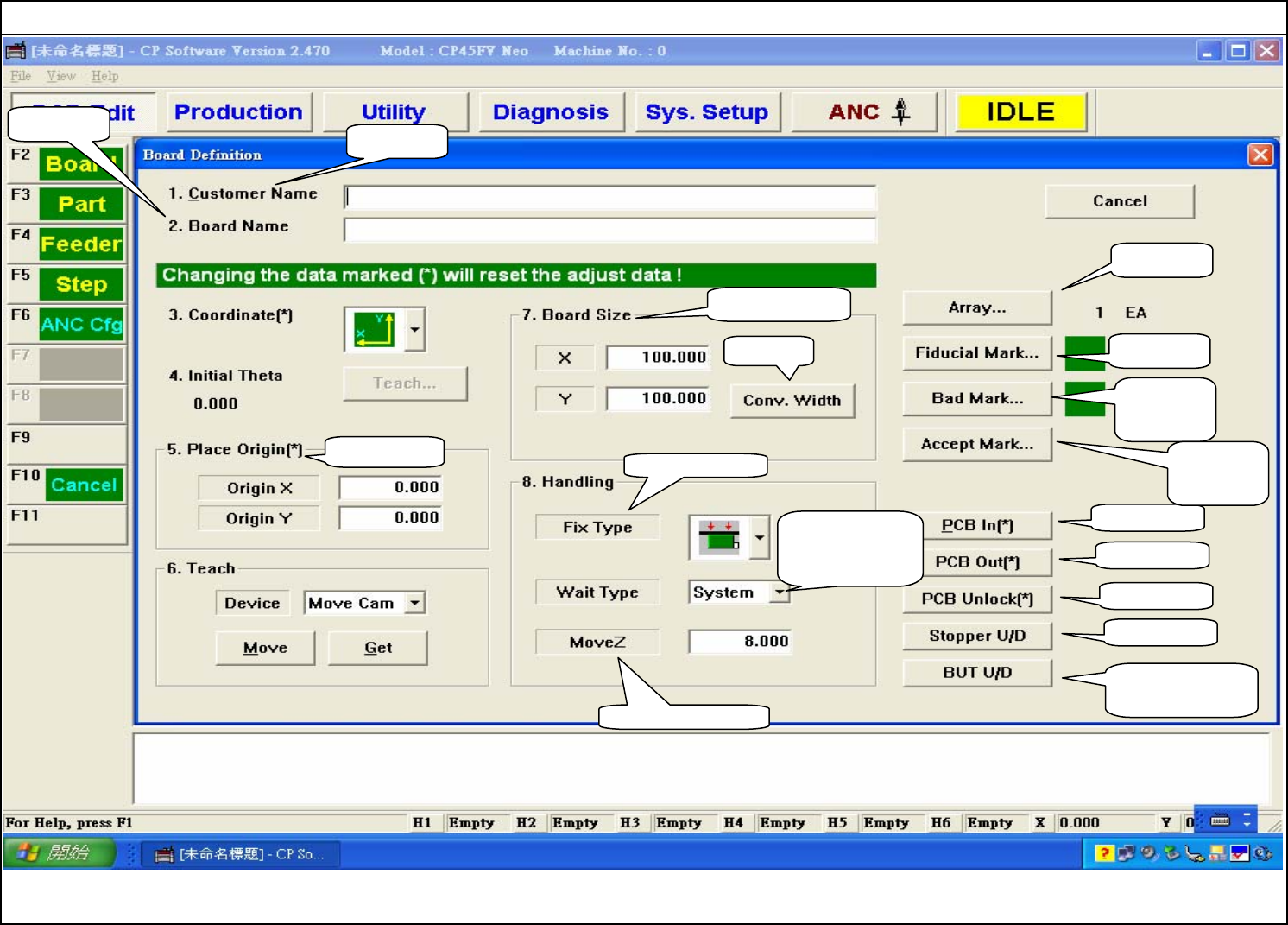
基板程式編輯
*Place origin=Device要選Move cam再使用遙控器調整到正確的位置後要按Get才會存檔
+
+
不用
相機留位置
auto停在 mark位
置
座標原點設定
吸嘴底部到基板高
軌道夾基板方式
基板檔板控
Back Up Table
上下控制
不夾基板
基板送出
基板送進
基板尺寸設定
軌道調整
客戶名稱
基板名稱
連板編輯
Mark編輯
壞板偵測
Mark編輯
好板偵測
Mark編輯
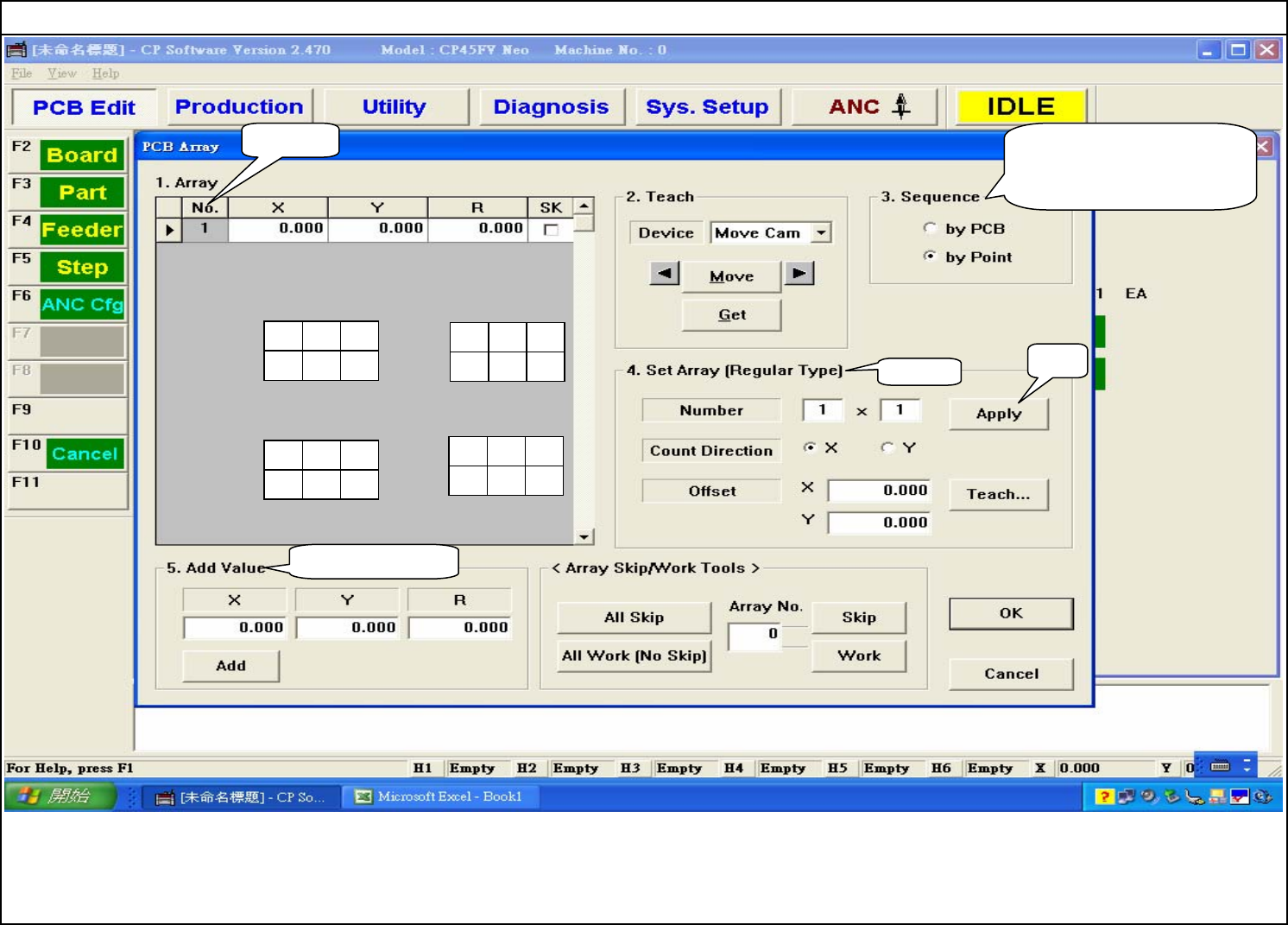
2.少連板設定=點基板編號→使用遙控器找第二點→Get→使用遙控器找第三點→Get……
1.設定連板數量=在Number輸入X或Y數量→Apply
3.多連板設定=點Teach→使用遙控器找第一點→Enter→使用遙控器找第二點→Enter
連板設定步驟:
連板編輯
所有連板Offset修改
基板編號
置件方式:
1.by PCB= 一小板一小板置件
2.by point= 依零件順序置件
連板設定
確認
6 4 2
35 1
6 5 4
23 1
4 5 6
21 3
2 4 6
31 5
流向由左至右
X算法
Y算法
流向由右至左
X算法
Y算法