MOTOMAP7AR900.pdf - 第2页
多功能通用型机器人 ■ 机器人本体标准规格 ■ 控制柜 YRC 1000 标准规格 标准规格 GP 7 GP 8 规格 项目 YR - 1 - 06 VX 7 - A 00 型号 YR - 1 - 06 VX 8 - A 00 构造 防尘构造 IP 54 ( 背面 FAN 部 : IP 2 X ) 垂直多关节型 ( 6 个自由度 ) 构造 垂直多关节型 ( 6 个自由度 ) 外形尺寸 598 ( 宽 ) x 427 ( 深 ) x 49…
YASKAWA
多功能通用型机器人
MOTOMAN
-
GP
7
/
AR
900
可搬质量
:
7
kg
6
轴垂直多关节型
MOTOMAN
-
GP
8
/
AR
700
可搬质量
:
8
kg
6
轴垂直多关节型
J
空制柜
YRC
1000
提高生产力
通过同级别第一的可搬质量
、
速度
、
手腕轴容许扭矩
,
实现超强搬运能力
!
通过同级别第一的可搬质量
(
7
kg
/
8
kg
)
及手腕轴的容许负载扭矩提升
38
%
,
使搭载更多种类工件及抓手成为可能
。
实现全轴高速化
(
最大提升
39
%
)
。
通过改善加减速控制
,
无需依赖姿势
,
将加减速时间缩短至极限
。
设备更紧凑
通过更纤细
、
更方便使用的本体
、
手臂的构造
,
缩小设备空间
!
通过纤细的本体将设置空间降至最小
(
L
,
U
轴偏置最小
)
。
电缆可从本体底部引出
,
与侧面引出相比降低了与墙壁的干涉
。
提升最大运动范围及前后行程
,
可对应宽范围的作业空间
。
通过纤细
、
笔直
、
左右对称的手臂设计
,
即使在狭小空间内也可把与周边
设备的干涉控制到最小
。
提升导入
.
使用
.
维护的效率
!
I
超高环境性能
基本轴及手腕轴的标配保护等级为
IP
67
,
有效抑制粉尘
。
简单维护
更换机内电缆时无需接入电池也可保持原点数据
。
减少电缆
、
接头数量以提升作业性能
。
方便清洁的设计
表面采用尘埃不易附着的表面设计
。
采用
1
根供电电缆
,
减少配线工时
。
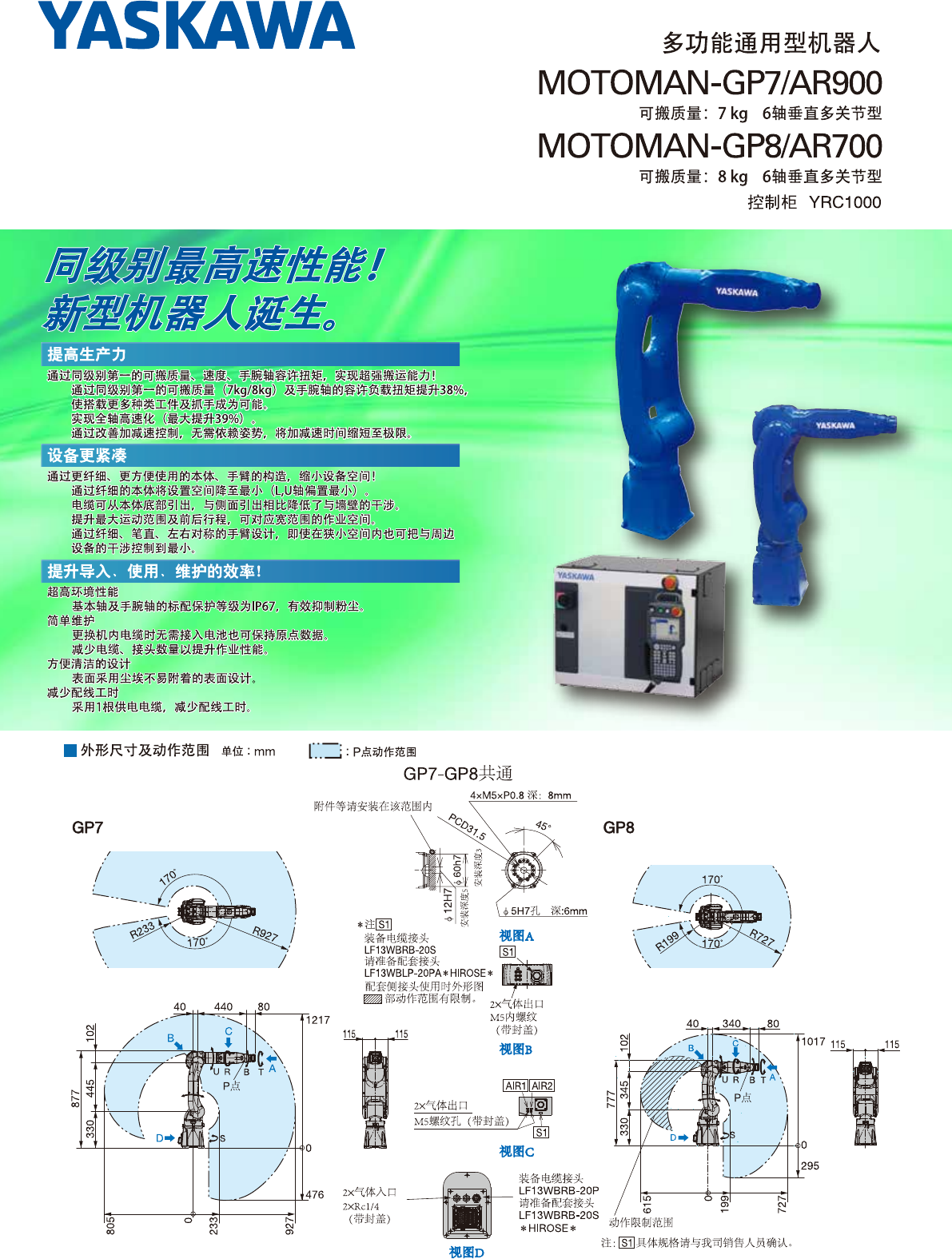
■
外形尺寸及动作范围单位
:
mm
;
:
P
点动作范围
GP
7
-
GP
8
共通
4
xM
5
xP
0.8
深
:
8
mm
附件等请安装在该范围内
GP
7
<
5
。
GP
8
铤
a
-
C
\
J
陡
4
>
5
H
7
孑
[
■
'
^
:
6
mm
*
注
[
11
]
装备电缆接头
LF
13
WBRB
-
20
S
请准备配套接头
LF
13
WBLP
-
20
PA
*
HIROSE
*
视图
A
颐
fir
配套侧接头使用时外形图
部动作范围有限制
。
2
X
气体出口
M
5
内螺纹
(
带封盖
)
视图
B
1217
C
1
_
15
115
B
SI
6
、
1017
115
115
寸
P
点
AIR
1
AIR
2
卜
00
2
X
气体出口
M
5
螺纹孔
(
带封盖
)
D
岭
S
0
■
O
0
视图
C
295
装备电缆接头
LF
13
WBRB
-
20
P
请准备配套接头
LF
13
WBRB
-
20
S
*
HIROSE
*
2
X
气体入口
2
XRcl
/
4
(
带封盖
)
皂
o
»
476
ft
c
\
j
s
—
o
►
o
co
io
动作限制范围
注
:
HD
具体规格请与我司销售人员确认
。
§
3
视图
D

多功能通用型机器人
■
机器人本体标准规格
■
控制柜
YRC
1000
标准规格
标准规格
GP
7
GP
8
规格
项目
YR
-
1
-
06
VX
7
-
A
00
型号
YR
-
1
-
06
VX
8
-
A
00
构造
防尘构造
IP
54
(
背面
FAN
部
:
IP
2
X
)
垂直多关节型
(
6
个自由度
)
构造
垂直多关节型
(
6
个自由度
)
外形尺寸
598
(
宽
)
x
427
(
深
)
x
490
(
高
)
mm
,
125
L
7
kg
可搬质量
M
8
kg
75
kg
以下
(
可内置外部
3
轴
)
毛重
重复定位精度
2
±
0.03
mm
±
0.02
mm
冷却方式
间接冷却
S
轴
(
旋转
)
动作范围
-
170
。
一
+
170
。
-
170
°
—
+
170
°
L
轴
(
下臂
)
-
65
。
一
+
145
。
65
。
一
+
145
。
通电时
:
0
C
~
+
4513
,
保管时
:
-
10
C
~
+
60
t
周围温度
U
轴
(
上臂
)
-
116
°
-
+
255
°
-
113
。
一
+
225
。
相对湿度
最大
90
%
(
无结露
)
R
轴
(
手腕旋转
-
190
。
一
+
190
。
-
190
。
一
+
190
。
标局
2000
m
(
但会存在温度延迟
)
(
注
)
标高
1000
m
以上的条件
:
按周围最高温度每上升
100
m
减少
1
%
。
B
轴
(
手腕摆动
]
"
-
135
。
一
+
135
。
-
135
°
—
+
135
°
T
轴
(
手腕回转
y
一
360
。
一
+
360
。
-
360
°
-
+
360
°
S
轴
(
旋转
)
最大速度
电源规格
6.54
rad
/
s
,
3757
s
7.94
rad
/
s
,
4557
s
三相
AC
380
V
~
440
V
(
+
10
%
-
15
%
)
50
/
60
Hz
(
±
2
%
)
(
中性点接地
)
L
轴
(
下臂
)
5.50
rad
/
s
,
3157
s
6.72
rad
/
s
,
3857
s
接地
C
种接地
(
400
V
级
)
U
轴
(
上臂
)
7.15
rad
/
s
,
4107
s
9.07
rad
/
s
,
5207
s
输入输出信号
专用信号
:
输入
19
,
输出
:
6
通用信号
:
输入
40
,
输出
:
40
(
晶体管输出
:
32
继电器输出
:
印
R
轴
(
手腕旋转
y
9.59
rad
/
s
,
5507
s
9.59
rad
/
s
,
5507
s
B
轴
(
手腕摆动
)
9.59
rad
/
s
,
5507
s
9.59
rad
/
s
,
5507
s
位置控制方式
串行通讯方式
(
编码器规格
}
T
轴
(
手腕回转
)
17.45
rad
/
s
,
10007
s
17.45
rad
/
s
,
10007
s
容许力矩
R
轴
(
手腕旋转
)
17
N
-
m
17
N
.
m
记忆容量
JOB
:
200
,
000
程序点
,
10
,
000
机器人命令
CIO
梯形图
:
20
,
000
程序点
B
轴
(
手腕摆动
)
17
N
-
m
17
N
*
m
T
轴
(
手腕回转
)
10
N
-
m
10
N
-
m
PCI
express
:
2
卡槽
增加插槽
容许惯性力矩
(
GD
2
/
4
)
R
轴
(
手腕旋转
)
0.5
kg
.
m
2
0.5
kg
.
m
2
2
个
(
10
BASE
-
T
/
100
BASE
-
TX
)
LAN
(
上位连接
)
B
轴
(
手腕摆动
)
0.5
kg
.
m
2
0.5
kg
.
m
2
串
IHI
/
F
RS
-
232
C
:
1
个
T
轴
(
手腕回转
)
0.2
kg
.
m
2
0.2
kg
.
m
2
本体质量
34
kg
32
kg
控制方式
伺服软件
防护等级
本体
:
IP
67
,
手腕轴
:
IP
67
驱动单元
AC
伺服用伺服包
0
^
-
+
45
^
安装环境
喷漆色
前面
:
浅灰色
(
相当于色卡
N
7
_
7
)
本体
:
深灰色
(
相当于色卡
N
3
)
湿度
20
%
-
80
%
RH
(
无结露
)
振动
4.9
m
/
s
2
以下
其他
不可有引火性及腐蚀性气体
,
液体
远离电气噪音源
■
示教编程器规格
1
kVA
电源容量
*
3
规格
项目
置地式
,
倒挂式
,
壁挂式
,
倾
安装方式
外形尺寸
152
(
宽
)
x
53
(
深
)
x
299
(
厚
)
mm
*
1
:
U
臂上的负载随手腕部负载重量变化
。
*
2
:
JISB
8432
为基准
。
*
3
:
因用途
,
动作模式而异
。
*
4
:
壁挂式
,
倾斜式安装时
,
S
轴的动作会有限制
。
(
注
)
本表是以
SI
单位系为记载
。
毛重
0.730
kg
材质
强化塑料
选择键
,
轴操作键
,
数值
/
应用键
,
带钥匙的
切换模式键
(
示教模式
、
在线模式
、
远程模式
)
,
急停键
,
功能键
,
SD
卡
I
/
F
装置
(
SD
卡为选配
)
,
USB
端口
(
USB
2.0
1
个
)
操作机器
5
_
7
英寸
TFT
彩色液晶触摸屏
VGA
(
640
X
480
像素
)
(
汉字
、
平假名
、
片假名
、
英文
、
数字
、
其他
)
显示屏
防护等级
IP
54
电 缆 长 度 标 准
:
8
m
,
最大
(
选配
)
:
36
m
(
追加延长线缆
)
■
降低
S
轴旋转时的干涉半径
■
关节部旋转时的干涉半径
现有机型
:
MH
5
(
L
)
S
II
干涉半径
182
mm
新型机型
:
GP
7
,
GP
8
干涉半径
140
mm
现有机型
:
MH
5
(
L
)
S
II
干涉半径
73
mm
新型机型
:
GP
7
,
GP
8
干 涉 半 径
6 7
mm
供电电缆从侧面引出及从底部引出
(
选项
)
-
使用前请熟读说明书及其附属文件等
,
化确使用
。
-
此目录记载的产品为一般产业用机器人莫托曼
(
MOTOMAN
)
。
如
M
0
T
0
MAN
发生的故障及错误操作直接威胁到人生安全
,
或被适用于危害人体安全的用途时请到我司营业厅窗口询问
,
我们将作出改善
。
•
为了使您更容易理解
,
本资料内所使用的照片是除去法定安全栏后摄影的
。
另外
,
图解等都为意向图
。
安全注意
A
安川電機
(
中国
)
有限公司机器人事业部
上海机器人中心
上海市静安区万荣路
700
号
D
2
200072
TEL
021
-
36567900
FAX
021
-
56720075
上海市黄浦区湖滨路
222
号领展企业广场一座
22
楼
200021
TEL
021
-
53852200
FAX
021
-
53853299
广州机器人中心
安川電機
(
中国
)
有限公司广州分公司
广州市天河区黄埔大道西平云路
163
号广电平云广场
B
塔
1
层
06
单元
510656
TEL
020
-
38780005
FAX
020
-
38780565
广州市天河区黄埔大道西平云路
163
号广电平云广场
B
塔
1
层
06
单元
510656
TEL
020
-
38780005
FAX
020
-
38780565
成都机器人中心
安川電機
(
中国
)
有限公司成都分公司
四川省成都市高新西区西芯大道
3
号国腾科技园区内
5
栋
1
层
104
室
611731
TEL
028
-
86719370
FAX
028
-
86719371
四川省成都市高新西区西芯大道
3
号国腾科技园区内
5
栋
1
层
104
室
611731
TEL
028
-
86719370
FAX
028
-
86719371
安川
(
中国
)
机器人有限公司
江苏省常州市武进高新区武进西大道
59
号
510620
TEL
0519
-
86220612
FAX
0519
-
86220611
YASKAWA
如果本产品的最终使用者是军方
,
并将本产品用于兵器制造使用时
,
将被视为
[
外国外汇及
外国贸易法
]
所规定的出口限制对象
,
被出口时请详细并且慎重的审查必要的出口手续
。
因产品改良原因而发生功率
,
规格
,
尺寸等一部分的更改时
,
恕不另行通知
。
安川電機
(
中国
)
有限公司
关于该资料的询问
,
请询问相关代理店或上记公司
。
资料编号
:
R
-
200
-
00003
-
17002
<
2
>
2017
年
6
月作成