00193921-03.pdf - 第144页
3 Technische Daten Betriebsanleitung SIPLACE H F-Serie 3.11 Visionmodule Softwareversion SR.50x.xx Ausgab e 01/2006 DE 144 3.1 1 V isionmodule Jeder 6- Segment- und jeder 12-Segme nt-Colle ct&Place- Kopf besitzt sein…
Betriebsanleitung SIPLACE HF-Serie 3 Technische Daten
Softwareversion SR.50x.xx Ausgabe 01/2006 DE 3.10 Portale
143
Die Y-Achse besteht im Wesentlichen aus folgenden Hauptbaugruppen: 3
– Y-Linear-Motor (Primärteil) (1)
– Permanentmagnet (Sekundärteil des Y-Linear-Motors) (2)
– Lineares Wegmesssystem (3)
– Führungssystem (4)
– Kabelschlepp (5)
3
Die Y-Achse wird von einem Linearmotor angetrieben. Der Sekundärteil des Antriebs besteht aus
Permanentmagneten und ist am Maschinenständer montiert. Der Primärteil ist mit dem Portal ver-
schraubt. 3
3.10.6 Technische Daten der Y-Achse
3
Antrieb direkt, Linearmotor
Max. Geschwindigkeit 2,5 m/sec.
Verfahrweg 1430 mm
Wegmesssystem Linearer Metallmaßstab
Maßstabslänge 1850 mm
Auflösung 1 µm
3 Technische Daten Betriebsanleitung SIPLACE HF-Serie
3.11 Visionmodule Softwareversion SR.50x.xx Ausgabe 01/2006 DE
144
3.11 Visionmodule
Jeder 6-Segment- und jeder 12-Segment-Collect&Place-Kopf besitzt sein eigenes Bauelemente-
Visionmodul (siehe Abb. 3.7 - 3
Seite 118 und Abb. 3.7 - 6 Seite 123). Die BE-Kamera, stationär,
P&P (Typ 22) 50 x 40 für den TwinHead ist am Maschinenrahmen befestigt. 3
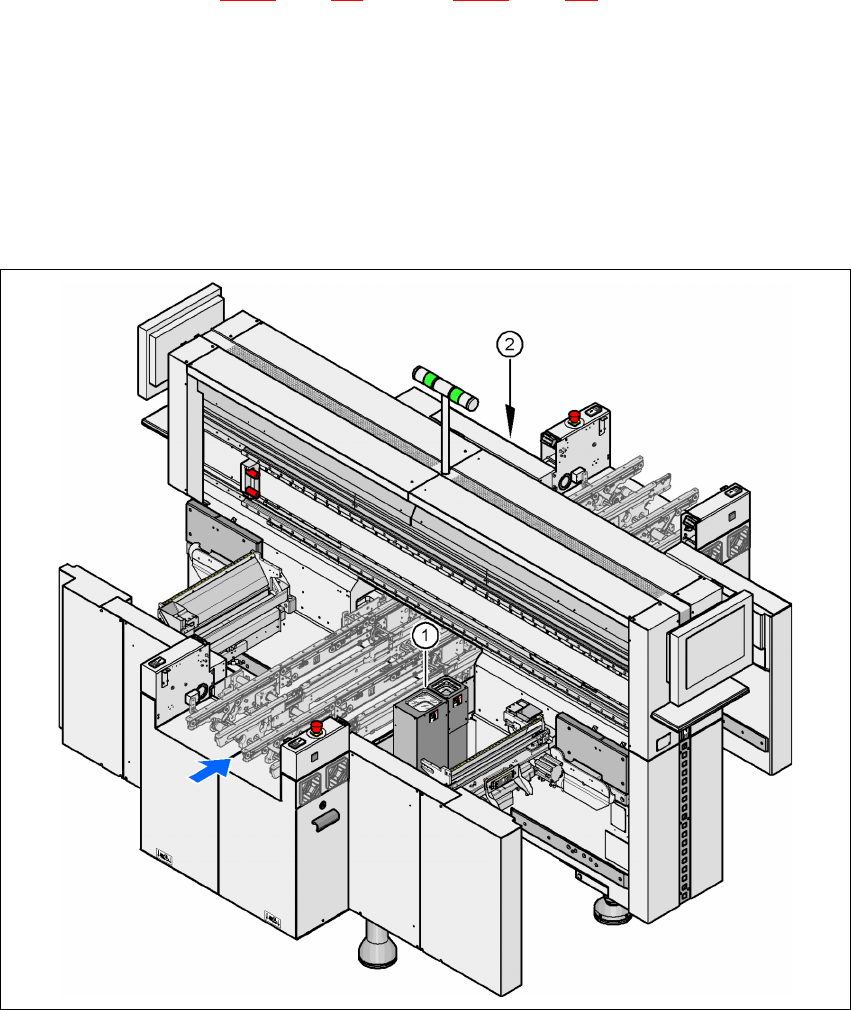
Montagepositionen der BE-Kamera, stationär, P&P (Typ 22) 50 x 40 3
3
3
Abb. 3.11 - 1 Montagepositionen der BE-Kamera, stationär, P&P (Typ 22) 50 x 40
3
(1) Montageposition für Stellplatz 1 (HF-Automat)
(2) Montageposition für Stellplatz 3 (HF- und HF/3-Automat)
TwinHead BE-Kamera, stationär, P&P (Typ 22) 50 x 40
Bestückbereich 1 Stellplatz 1 (HF-Automat)
Bestückbereich 2 Stellplatz 3 (HF- und HF/3-Automat)
Betriebsanleitung SIPLACE HF-Serie 3 Technische Daten
Softwareversion SR.50x.xx Ausgabe 01/2006 DE 3.11 Visionmodule
145
WARNUNG
KOPFCRASHGEFAHR 3
Bei einem Bestückkopfwechsel vom TwinHead zum Collect&Place-Kopf müssen die BE-
Kamera, stationär, P&P (Typ 22) 50 x 40 und die BE-Kamera, stationär, P&P (Typ 20) 8 x 8 des
TwinHead demontiert werden, sonst kollidiert der Collect&Place-Kopf mit den Kameragehäusen.
Mit Hilfe des BE-Visionmoduls wird 3
– die genaue Position des Bauelements an der Pipette und
– die Geometrie der Gehäuseform bestimmt.
Das LP-Visionmodul ermittelt mit Hilfe von Passmarken auf den Leiterplatten 3
– die Lage der Leiterplatte,
– ihren Verdrehwinkel
– und den Verzug der Leiterplatte.
Die LP-Kameras sind an der Unterseite der Portale befestigt. Mit Hilfe von Passmarken auf den
Zuführmodulen ermitteln sie die exakte Abholposition von Bauelementen, was speziell für kleine
Bauelemente von Bedeutung ist. 3