vitrox-v510i-g2-series_.pdf - 第5页
许货 5 1 0 / G 2 S Advanced Optical Inspection ( AOI ) Specifications Software System Windows 7 Pro Parametric component models , s & Jf learning classifiers , color learning , geomelfrc pattern matching , auto pre as…
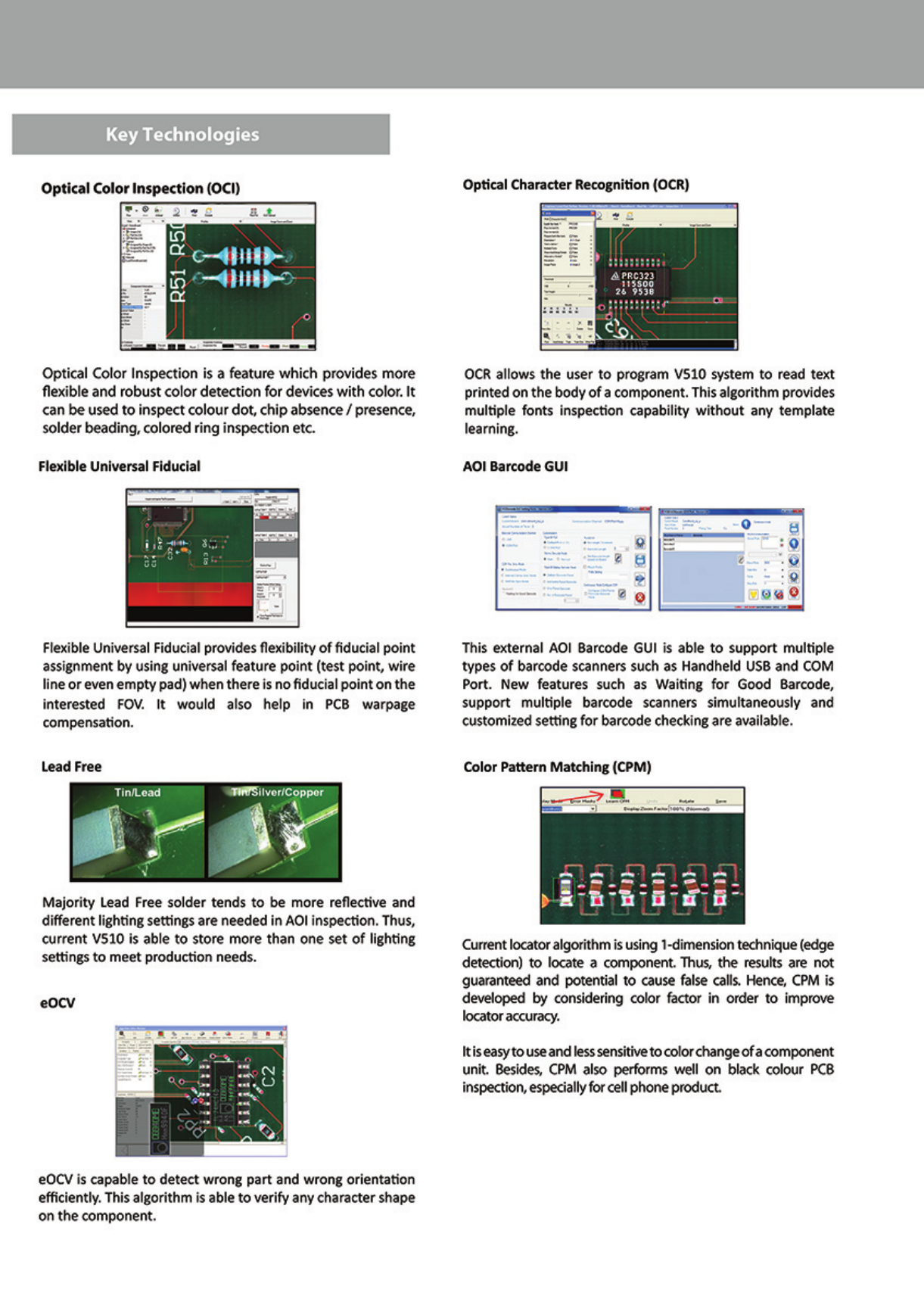
Optical
Character
Recognition
(
OCR
)
Optical
Color
Inspection
{
OCI
)
FTT
7
a
JL
P
Optical
Color
Inspection
is
a
feature
which
provides
more
flexible
and
robust
color
detection
for
devices
with
color
.
It
can
be
used
to
inspect
colour
dot
,
chip
absence
/
presence
,
solder
beading
,
colored
ring
inspection
etc
.
OCR
allows
the
user
to
program
V
510
system
to
read
text
printed
on
the
body
of
a
component
.
This
algorithm
provides
multiple
fonts
inspection
capability
without
any
template
learning
.
Flexible
Universal
Fiducial
AOI
Barcode
GUI
Flexible
Universal
Fiducial
provides
flexibility
of
fiducial
point
assignment
by
using
universal
feature
point
(
test
point
,
wire
line
or
even
empty
pad
)
when
there
is
no
fiducial
point
on
the
interested
FOV
,
It
would
also
help
in
PCB
war
page
compensation
.
This
external
AOI
Barcode
GUI
Is
able
to
support
multiple
types
of
barcode
scanners
such
as
Handheld
USB
and
COM
Port
.
New
features
such
as
Waiting
for
Good
Barcode
,
support
multiple
barcode
scanners
simuEtdneously
and
customized
setting
for
barcode
checking
are
available
.
Lead
Free
Color
Pattern
Matching
(
CPM
)
Majority
Lead
Free
solder
tends
to
be
more
reflective
and
different
lighting
settings
are
needed
in
AOI
inspection
.
Thus
,
current
V
510
is
able
to
store
more
than
one
S
t
of
lighting
settings
to
meet
production
needs
.
Current
locator
algorithm
is
using
1
-
dimension
technique
(
edge
detection
)
to
locate
a
component
.
Thus
,
the
results
are
not
guaranteed
and
potential
to
cause
false
calls
,
Hence
,
CPM
is
developed
by
considering
color
factor
in
order
to
improve
bcator
accuracy
.
eOCV
It
is
easy
to
use
and
tess
sensitive
to
color
change
of
a
component
unit
.
Besides
,
CPM
also
performs
well
on
btack
colour
PCS
inspection
,
especially
for
cell
phone
product
eOCV
is
capable
to
detect
wrong
part
and
wrong
orientation
efficiently
.
This
algorithm
is
able
to
verify
any
character
shape
on
the
component
.
s
'
;
在
PRC
321
Key
Technologies
i j o
i
&
二一
o
ff
.
i
=
aH
_
0
h
二
L
*
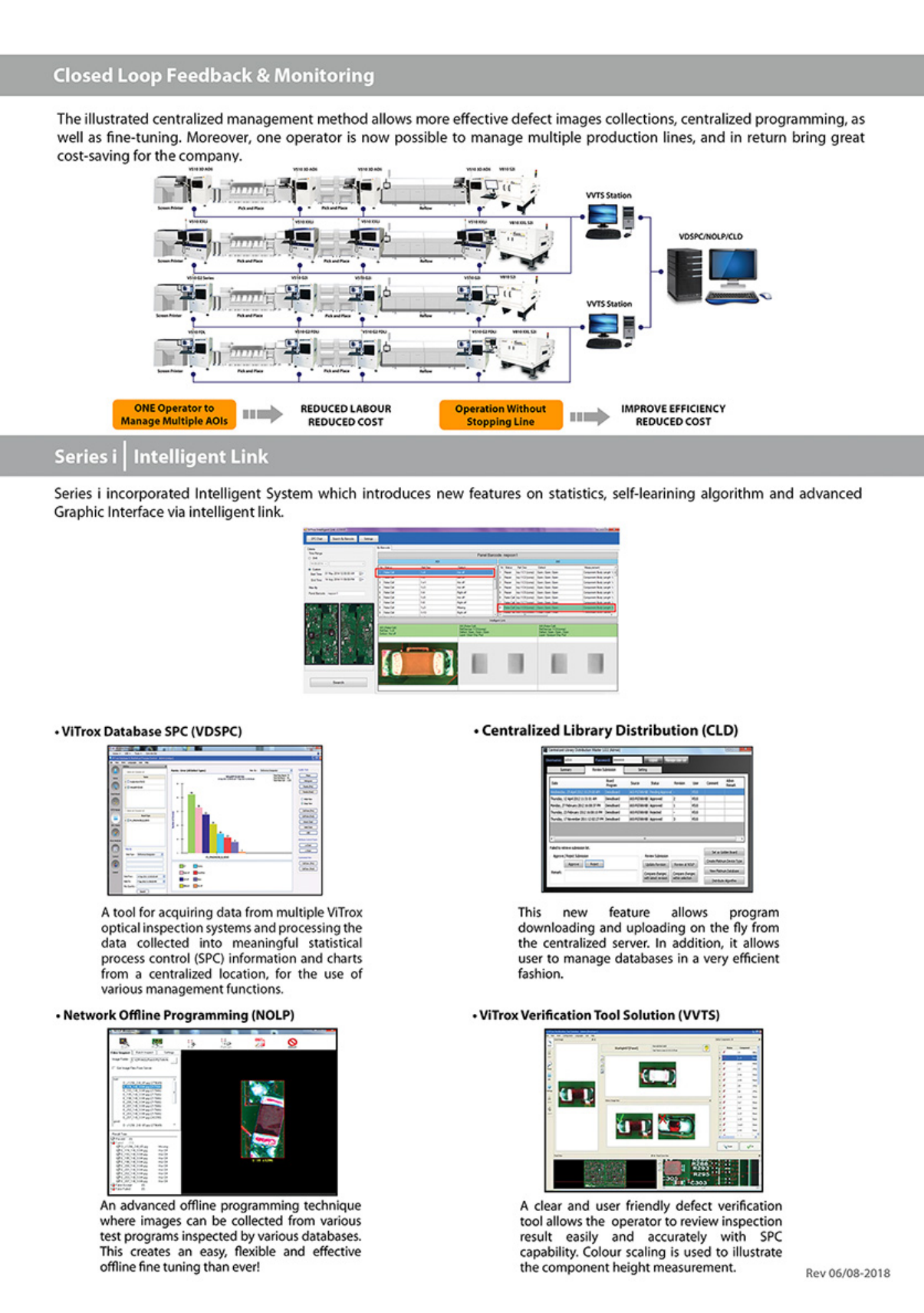
ViTrox
Database
SFC
(
VDSPC
)
_
Centralized
Library
Distribution
(
CLD
)
圍
Closed
Loop
Feedback
&
Monitoring
The
illustrated
centralized
:
managemem
method
allows
more
effective
defect
images
collections
,
centralized
programming
,
as
well
as
fine
-
tuning
.
Moreover
,
one
operator
is
now
possible
to
manage
multiple
production
lines
,
and
in
return
bring
great
cost
-
savmg
for
the
company
.
TT
;
i
,
fc
-
'
"
Jfc
'
一
^
h
單
8
足
'
WTStLifcn
St
I
■
岭
ONE
Operator
to
Mj
)
nAg
«
Muiltipk
AOtl
RiDUCeD
lASOUR
ftEDMCi
&
COST
0
|
v
«
ral
^
n
Without
Stopping
Line
IMPROVE
EfFlC
!
ENCY
REDUCED
GOST
■
■
岭
Series
i
Intelligent
Link
Series
i
incorporated
Intelligent
System
which
introduces
new
features
statistics
,
s
^
lf
-
learining
algorithm
and
advanced
Graphic
Interface
via
intelligent
link
.
■
.
-
J
.
f
s
r
.
f
5
:
i
:
S
=
?
A
tool
for
acquiring
data
from
multiple
ViTrox
optical
inspection
systems
and
processing
the
data
colteeted
into
meaningful
statistical
process
control
(
SPC
)
information
and
charts
from
a
centralized
locat
'
ion
,
for
the
use
of
various
management
functions
,
■
Network
Offline
Programming
(
IMDLP
)
This
new
Feature
allows
program
downloading
and
uploading
on
the
%
from
the
centralized
server
.
In
addition
,
it
allows
user
to
manage
databases
In
a
very
efficient
fashion
.
*
ViTrox
Verification
Tool
Solution
(
WTS
)
:
T
:
D
3
S
3033
U
An
advanced
offline
programming
!
technkjue
where
images
can
be
collected
from
various
test
programs
inspected
by
various
databaiei
-
This
creates
an
easy
,
flexible
and
effective
offlinre
fine
tuning
than
ever
!
A
dear
and
user
friendly
defect
verification
tool
allows
the
operator
to
review
inspection
result
easily
md
accurately
with
SPC
capability
.
Colour
scaling
is
used
to
illustrate
the
component
height
measurement
.
Rev
06703
-
2018
你
m
M
ii
-
i
'
t
~
-
i f
-
.
-
f
-
…
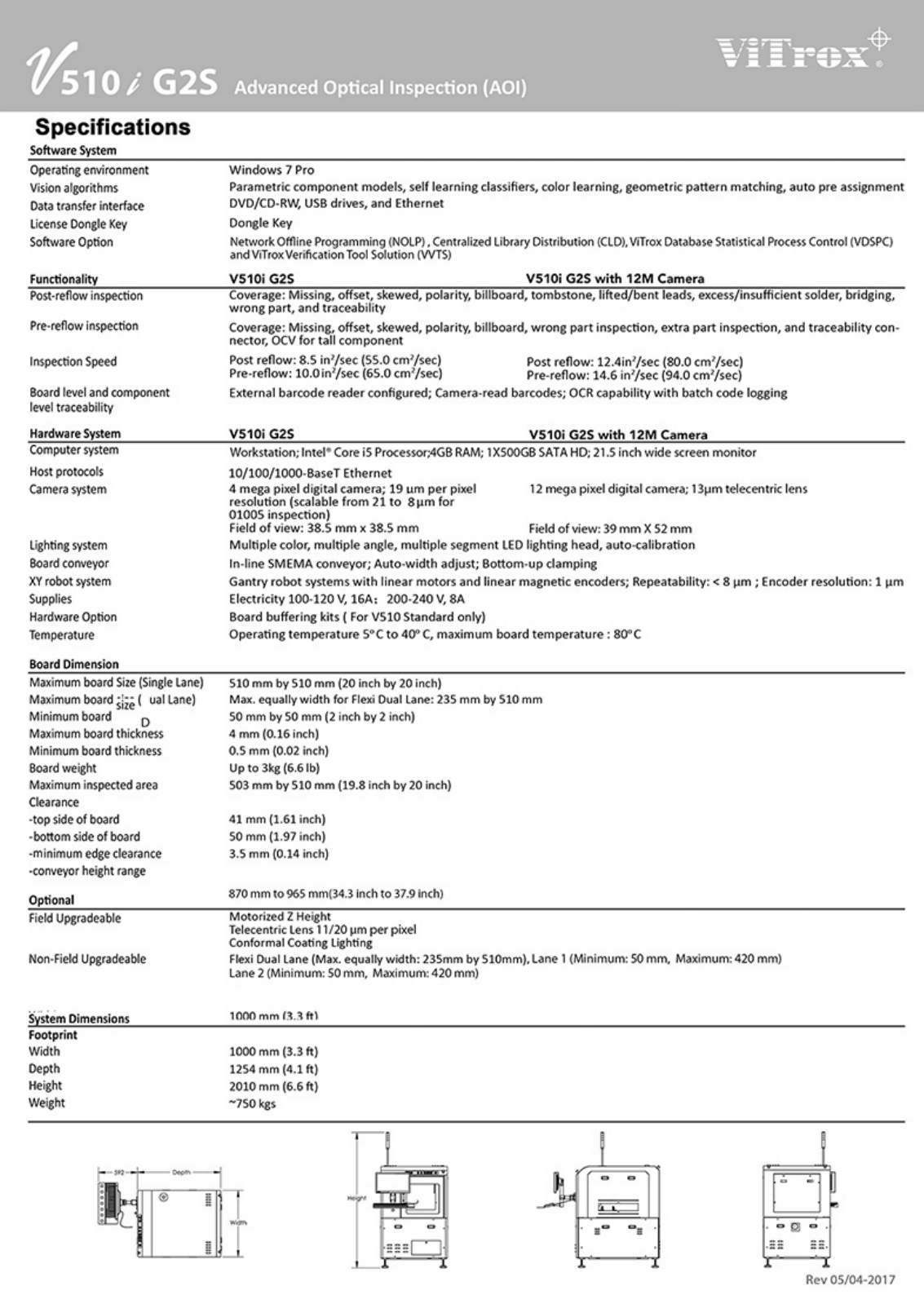
许货
510
/
G
2
S
Advanced
Optical
Inspection
(
AOI
)
Specifications
Software
System
Windows
7
Pro
Parametric
component
models
,
s
&
Jf
learning
classifiers
,
color
learning
,
geomelfrc
pattern
matching
,
auto
pre
assignment
DVD
/
CD
-
RW
,
USB
dfiws
,
and
Ethernet
□
ongie
Key
W
^
workOfftine
Programming
<
NOLP
}
,
Cental
ized
Library
Dittribwlion
(
CLD
^
ViTrox
Daiabase
Statistical
Pr
<
Ke
«
Control
(
VDSPC
)
an
<
J
WTr
<
w
Verification
Tool
SoJution
{
WTS
>
Opefating
environ
meni
Vision
af
^
orithms
Da
£
s
tran
&
Fer
interface
license
Dongle
Key
Software
Option
Functionatity
VSIOi
G
2
S
V
510
i
G
2
S
with
12
M
Camer
A
ge
:
Missings
offset
,
skewed
,
po
*
afity
*
billboard
,
tombstone
,
llfled
/
bent
leads
,
excess
/
insufficlent
solder
,
bridging
POSt
-
reflOW
irtSp
^
ti
⑽
Covera
wrong
Coverage
:
Mi
&
sing
,
offset
,
skewed
,
polarity
,
billboard
,
wrong
part
in
&
pectionj
extra
pan
『
nsiMCtioiL
and
traceability
con
-
nector
,
OCV
for
tali
component
Pre
^
reflow
inspection
Post
r
^
fldw
:
S
.
S
(
SS
.
O
cmVs
®
^
)
Pre
-
reflow
:
lO
.
OinVsec
<
6
S
.
O
cm
?
/
sec
)
iriipe
<
tion
Speed
Post
fc
(
\
ow
:
12.4
ifi
7
sec
(
80.0
cmVwc
)
Pre
-
reflow
:
J
4.6
inV
$
&
c
(
94.0
crriJ
/
sec
)
Exi
^
mal
barc
^
d
^
{
:
dnfigLir
^
d
;
C
^
rtiera
-
r
^
ad
barconie
$
;
OCR
capability
with
batch
code
logging
Scurd
fevel
and
component
lew
!
tfac
^
bility
Hardware
System
VStOi
G
2
S
VS
10
i
G
2
S
with
12
M
Camera
Compiler
system
Workstation
;
Intd
*
Core
iS
Processor
;
4
GB
RAM
;
IX
500
GB
SAT
A
HO
-
21
,
5
inch
wide
«
reen
monitor
10
/
100
/
1000
,
BaseT
Ethernet
4
mega
pixel
digital
camera
;
19
tim
p
^
r
pixel
r
&
solutfon
(
&
C
3
lable
from
21
to
3
|
im
Fof
0100
S
inspection
)
Fi
^
fd
of
vi
^
w
:
3
S
.
S
mm
x
3
S
-
5
mm
Multiple
color
,
rnultipie
angSe
,
rnuStiple
segment
LED
lighting
head
,
autocallbration
In
-
lSne
SMEMA
conveyorJ
Aulo
-
width
adjustj
Bottom
-
up
clamping
Gantrv
robot
systems
with
linear
motors
and
linear
magnelit
encoders
;
Repeatability
:
<
8
jim
;
Encoder
reMlution
:
1
Electricily
100420
兄
16
A
:
200
-
240
V
.
8
A
Board
buffering
kiits
{
For
VS
10
Standard
onSy
)
Operating
temperature
S
^
C
to
40
°
Ct
maximum
board
temperature
:
80
^
C
Host
proiocoEs
.
Camera
system
12
mega
pixel
digital
carrwra
;
telecertlfk
lens
Field
of
view
:
^
9
mm
X
52
mm
Lighting
system
Boafd
tcn
^
vor
XY
robot
system
Supplies
Hardware
Option
Temperature
Burd
Dim
«
n
$
ion
Maximum
board
Size
(
Single
Lane
)
M
jxSmym
board
^
|
j
-
(
ual
Lane
)
Minimum
board
M
^
imurn
bowd
thickn
<
$
$
Minimum
bo
^
rd
thickness
Board
weight
Maxsmum
inspected
area
Clearance
娜
side
of
board
-
bottom
side
of
board
-
minimum
edge
clearance
■
conveyor
height
range
S
1
Q
mm
by
5
IQ
mm
(
2
Q
inch
,
by
Z
0
mch
]
MaaL
equally
width
for
Flftd
Dual
Lane
:
23
S
mm
by
SlO
mm
50
mm
by
SO
mm
(
2
inch
by
2
inch
)
A
mm
(
0
-
16
inch
<
)
O
S
mm
(
0.02
inch
]
Up
to
3
kg
(
6.61
b
)
503
mm
by
SlO
mm
(
19.8
m
£
h
by
20
inch
)
!
:
>
^
1
mm
(
l
.
l
inch
)
50
mm
(
1
,
97
inch
)
3
,
S
mm
(
0.14
inch
)
.
Q
7
Q
mm
to
965
rnm
(
34
,
J
inch
XO
37.9
inch
)
Optional
Motorized
Z
Height
t
^
l
^
cfintric
Conformal
Ftexi
Dual
Larte
(
Max
.
equally
width
:
235
mm
by
510
mm
}
rLane
1
(
Minimum
!
:
5 0
M a x i m u m
;
420
mm
)
Lane
2
(
Minrittum
;
SO
mmr
Maximum
:
420
mm
)
field
up
|
radeable
Lens
11
/
20
jim
ptf
Coating
lighting
pixel
Non
-
Fieki
UpgradeablG
Iflfy
)
mm
.
ffl
System
Dimensions
Footprint
Width
Depth
Height
we
#
t
1000
mm
12
&
4
mm
(
4.1
ft
)
2010
mm
(
6
-
6
ft
)
750
kgs
1
i
■
一咐
.
fe
_
窃
A
■
°
a
-
-
a
'
-
=
E
Rev
0
S
/
04
-
2017