矩子JutzeAOI程式误报调试.pdf - 第17页
检查结果:结果符合上限和下限之间,判定结果为 OK 。 反之,判定结果为 NG LedBox 计算参数:引脚根部、引脚、焊锡、焊盘各赋予一套亮度和颜色 亮度参数(可用鼠标通过直方图来设定): a) 亮度上限:设定最高亮度值( 0~255 ) b) 亮度下限:设定最低亮度值( 0~255 ) 颜色参数(可用鼠标通过色彩图来设定): c) 红色上限:设定红色最大值( 0~173 ) d) 红色下限:设定红色最小值( 0~173 ) e) 绿…
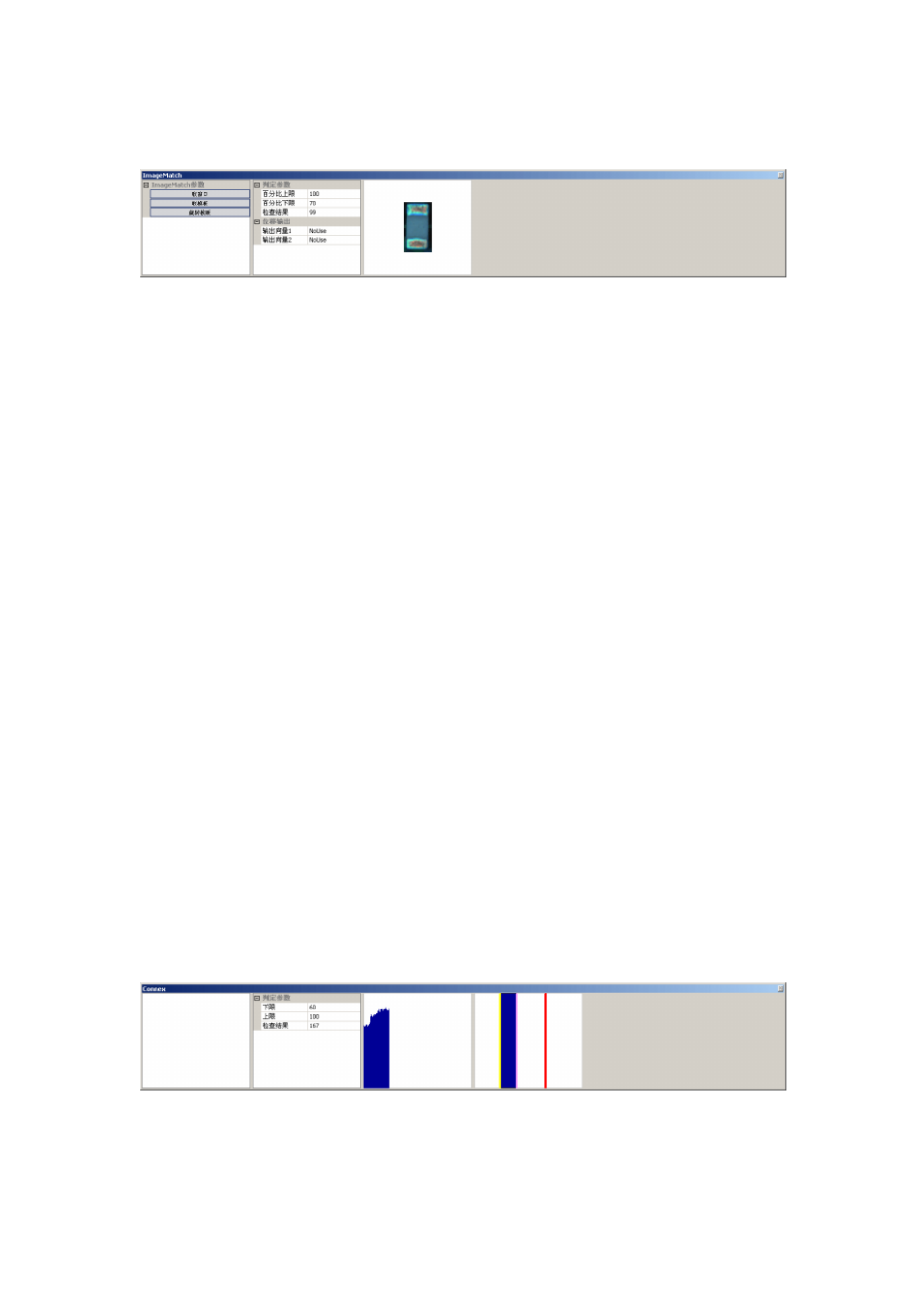
ImageMatch
图像获取方法:
a) 取窗口:按照设定检查窗口大小获取参考图像(目标图片大小)
b) 取模板:在检查窗口内搜寻和参考图像最接近图像,
c) 旋转模板:以原有模板为基础,调整参考图像的角度
判定参数:
f) 百分比上限:实际获取到的图像和参考图像进行相似度比对( 0-100)
g) 百分比下限:实际获取到的图像和参考图像进行相似度比对( 0-100)
检查结果:结果符合上限和下限之间,判定结果为 OK。反之,判定结果为 NG
位移输出:
输出向量:一个窗口只包含 X/Y 方向其中一个偏移量
Connex
判定参数:
a) 上限:窗口内亮度连通的最大值( 0-255)
b) 下限:窗口内亮度连通的最小值( 0-255)
检查结果:结果符合上限和下限之间,判定结果为 OK。反之,判定结果为 NG
LedBox
计算参数:引脚根部、引脚、焊锡、焊盘各赋予一套亮度和颜色
亮度参数(可用鼠标通过直方图来设定):
a) 亮度上限:设定最高亮度值( 0~255)
b) 亮度下限:设定最低亮度值( 0~255)
颜色参数(可用鼠标通过色彩图来设定):
c) 红色上限:设定红色最大值( 0~173)
d) 红色下限:设定红色最小值( 0~173)
e) 绿色上限:设定绿色最大值( 0~173)
f) 绿色下限:设定绿色最小值( 0~173)
g) 蓝色上限:设定蓝色最大值( 0~173)
h) 蓝色下限:设定蓝色最小值( 0~173)
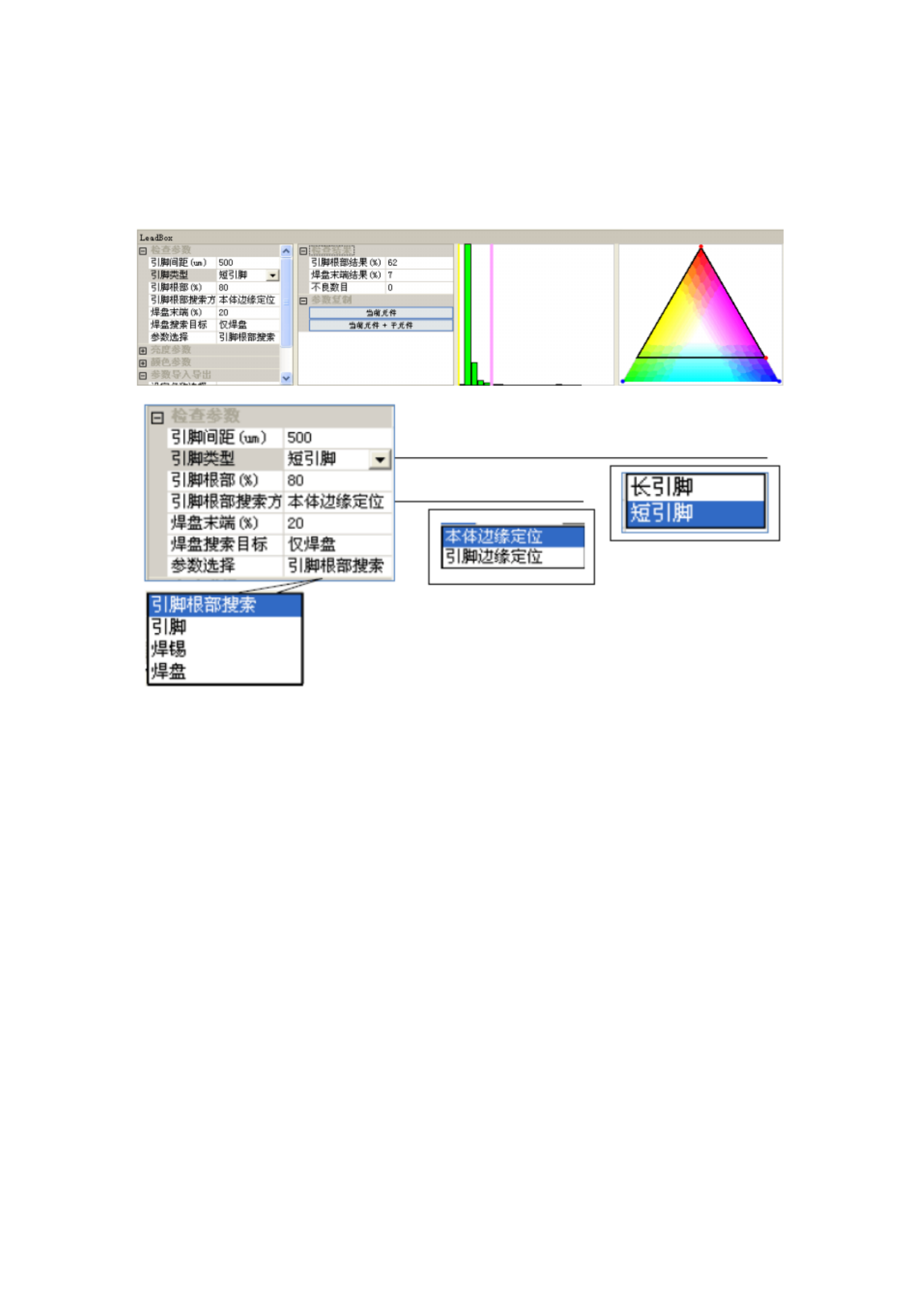
检查参数:
引脚间距:提供常规标准间距,也可自定义间距
引脚类型:分长引脚和短引脚
引脚根部 %:符合亮度和颜色的引脚长度占搜索窗口的长度百分比* 1
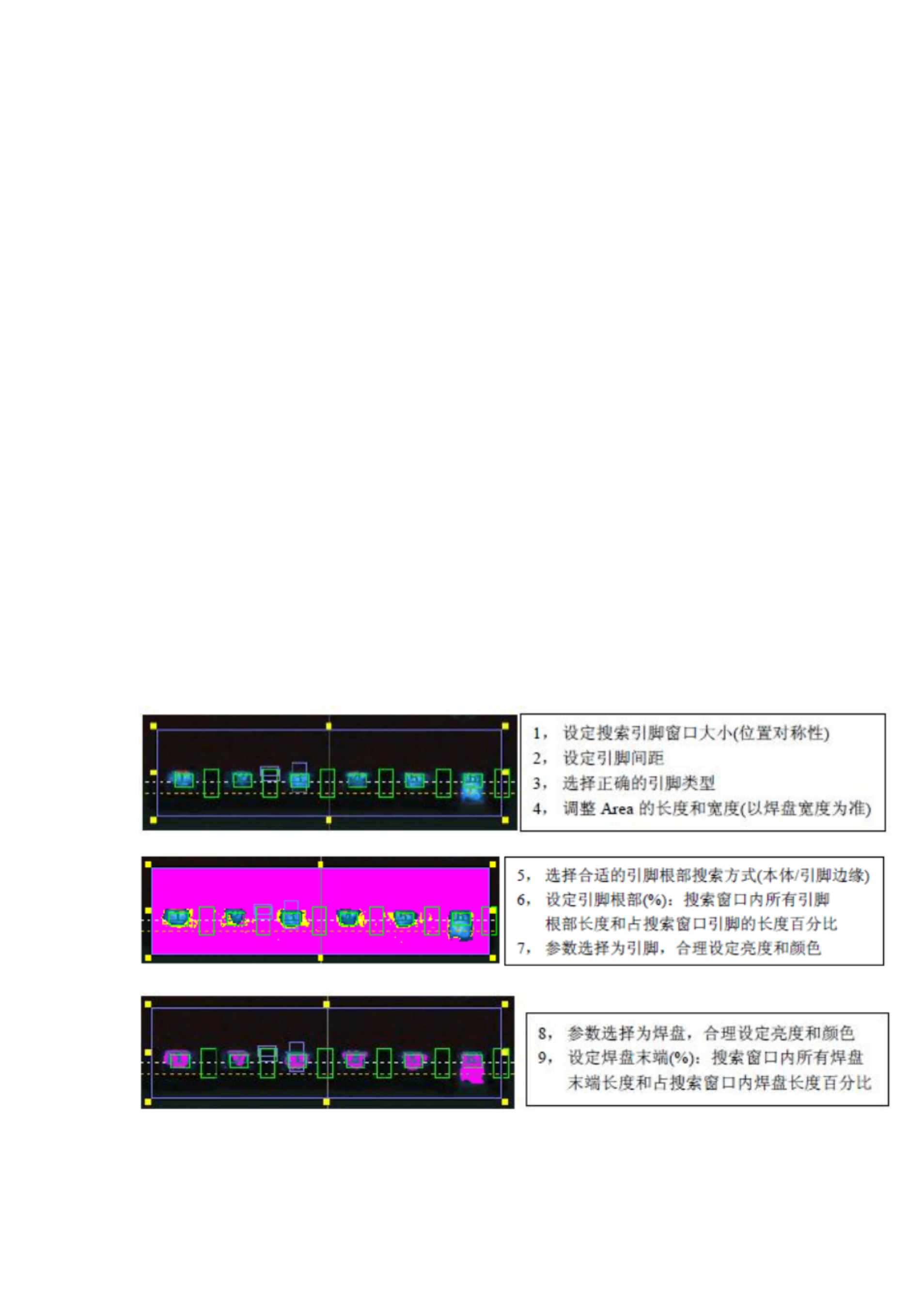
引脚根部搜索方法:分本体边缘定位和引脚边缘定位
焊盘末端 %:符合亮度和颜色的焊盘长度占搜索窗口的长度百分比* 2
焊盘搜索目标:分焊盘 、焊锡 、焊盘 +焊锡
参数选择:引脚根部搜索 、引脚、焊锡 、焊盘
判定参数:
a) 根据引脚根部设定参数:计算出最接近设定值的百分比作为引脚根部 (白色虚线 )
b) 根据焊盘末端设定参数:计算出最接近设定值的百分比作为焊盘前端 (黄色虚线 )
检查结果:统计所有检查窗口结果均符合上限和下限之间,判定不良数目: 0。
反之,按实际不良窗口进行统计数目 。
参数复制
a) 不含子元件的元件库,可使用 【当前元件 】对LedBox算法中的窗口进行复制
b) 含有子元件的元件库,可使用 【当前元件 +子元件 】对LedBox 算法中的窗口进行
LedBox算法注解