XP固有值一览 Type-III V1 51 (2).pdf - 第5页
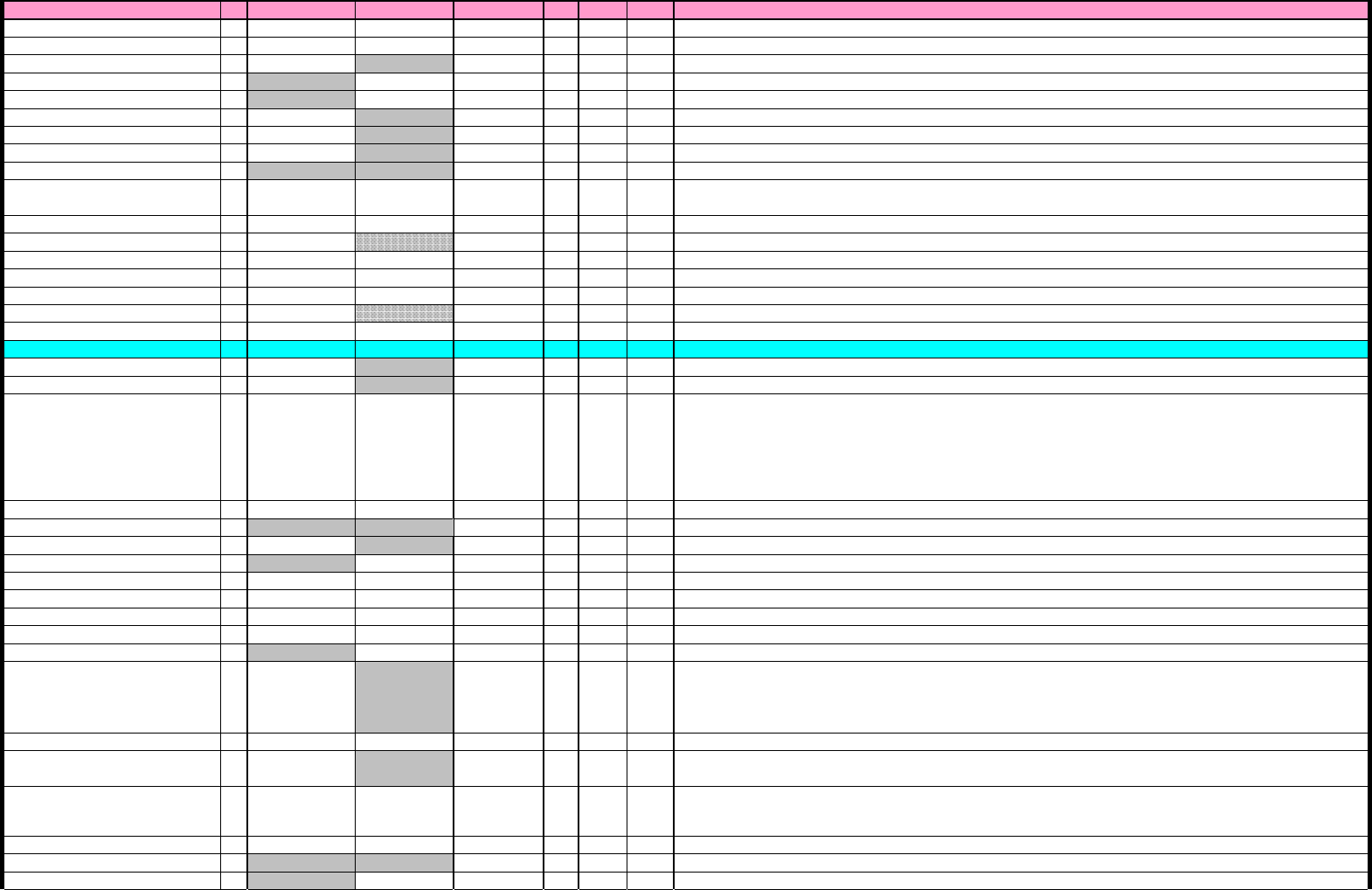
XP 固有値一覧 Type-III V1.51 2007-12-4現在 项目 XP-143E XP243E 输入范围 测定值 User编辑 重新接通电源 解说 __ErrStopBeforeFid = 0 0 0~1 --- 可 0:在先抓元件的影像处理错误时,机器不读取基准定位点而停止 1:不停止 __MarkEditWndAutoOpen = 1 1 0~1 --- 可 动显示 __OperationPanelDisp = 0 0 …
XP 固有値一覧 Type-III V1.51
2007-12-4現在
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
__targetOfst_Z = 0 0 没有范围
测定值
否
需要
绝对值译码器的修正量 [mm]
__targetOfst_Q
= 0 0 没有范围
测定值
否
需要
绝对值译码器的修正量 [mm]
__targetOfst_R
= 0 0 没有范围
测定值
否
需要
绝对值译码器的修正量 [mm]
__targetOfst_T
= 0 0 没有范围
测定值
否
需要
绝对值译码器的修正量 [mm]
__targetOfst_U
= 0 0 没有范围
测定值
否
需要
绝对值译码器的修正量 [mm]
__targetOfst_F
= 0 0 没有范围
测定值
否
需要
绝对值译码器的修正量 [mm]
__targetOfst_G
= 0 0 没有范围
测定值
否
需要
绝对值译码器的修正量 [mm]
__targetOfst_C
= 0 0 没有范围
测定值
否
需要
绝对值译码器的修正量 [mm]
__TestOption
= 0 0 0~1
--- 可
频闪灯不发光时的重新取入处理 0:无效 1:有效
X_StbTimeFast
= 20 10 0以上
测定值
否
[
msec
]
<TypeI>
贴装时的
X
轴静定时间
<TypeII
/
III>
低精度模式下
X
轴的静定时间
XP-142E… 10:Xno.517以前, 20:Xno.518以后
Y_StbTimeFast
= 10 15 0以上
测定值
否
[msec] <TypeI>贴装时的Y轴静定时间 <TypeII/III>低精度模式下Y轴的静定时间
R_StbTimeFast = 10 0 0以上
测定值
否
[msec] <TypeI>贴装时的R轴静定时间 <TypeII/III>低精度模式下R轴的静定时间
Q_StbTimeFast = 10 5 0以上
测定值
否
[msec] <TypeI>未使用 <TypeII/III>低精度模式下Q轴的静定时间
X_StbTimeSlow = 30 50 0以上
测定值
否
[msec] <TypeII/III>高精度模式下X轴的静定时间
Y_StbTimeSlow = 30 50 0以上
测定值
否
[msec] <TypeII/III>高精度模式下Y轴的静定时间
R_StbTimeSlow = 30 0 0以上
测定值
否
[msec] <TypeII/III>高精度模式下R轴的静定时间
Q_StbTimeSlow = 30 5 0以上
测定值
否
[msec] <TypeII/III>高精度模式下Q轴的静定时间
________OPERATION_2________ =
__DoNozzleCleaning = 1 0 -1~12
--- 可 不
要
设定每一块电路板的吸嘴的清扫根数。「-1」不清扫 「0」执行1根清扫动作 「1~12」执行指定根
__NozzleCleaningTime
= 300 0 0以上
--- 可 不
要
从具有吸嘴清扫功能的吸嘴喷出空气的时间[ms]
__DChangeTriger = 0 0 0~3
--- 可
料站/供料平台的切换触发器的指定
。
<XP141>0,2:补件 1::料尽(如果按下错误画面的料尽PB) 3:参考PD(未对应)
<XP142>
0:料尽或者影像处理出错时,移动至下一个料站
1,2:料尽时,移动至下一个料站。影像处理出错时机器停止。
3:参照元件数据Alt. Feeder Trigger, 移动至下一个料站,或者机器停止。
__ResetNGPartTrayUncondition = 0 0 0~1
--- 可
充满NG元件的时候,是否确认门的开启或关闭的设定。 0:确认 1:不确认
__NotSimpleOptimize
= 0 0 0~1
--- 可
0:使用简易优化 1:不使用简易优化
__NozzleSurfaceCheck
= 0 0 0~1
--- 可
检查吸嘴附有杂物的功能的指定。 0:未使用 1:使用
__UseVisionHeightOffset
= 0 0 0~1
--- 可
影像处理高度补正功能的指定。 0:未使用 1:使用
__FrontSideShtSpd
= 160 160 0以上
--- 否
前侧的侧光快门速度[μs]
__FrontFrontShtSpd
= 160 160 0以上
--- 否
前侧的前光快门速度[μs]
__RearSideShtSpd
= 160 160 0以上
--- 否
后侧的侧光快门速度 [μs]
__RearFrontShtSpd
= 160 160 0以上
--- 否
后侧的前光快门速度 [μs]
__OverviewCamShutterSpeed
= 0 10000 0以上
--- 否
视觉相机的快门速度 [μs]
__PlacingModeSwitch
= 00
<XP24*
,
341
>
0~1
<XP14*>
--- 可
<XP241
,
XP341>
切换贴装时的到达精度范围用的开关 0:不按VT区分到达精度 1:按VT100以上和不满区分到
达精度
<XP142>
__JogInterlockOFF
= 0 0 0~1
--- 否
JOG连锁功能 使用/未使用 0:使用 1:未使用
__PickPosAutoMeasure
= 0 0 0~2
--- 可
测定吸取位置功能
未使用/使用
0:
功能无效
1:
用在测定吸取位置画面内的指令进行
2:用测定吸取位置内的指令以及执行自动运转
__UseMachineNozzleOnly
= 0 0 0~1
---
可
设定为
1
后会有以下的变化
。
・自动运转准备处理时,无条件地使用对机器所设定的吸嘴进行运转准备处理。
・在编辑内的数据检查时,不是使用在生产程序中设定的吸嘴,而是使用在机器上设定的吸嘴进行数据检查。
__MiniSigWhiteLighting = 0 0 0~1
--- 可
操作权显示灯点亮条件设定 0:XP original 1:FUJI Standard
__VcmBreakChkSensor
= 0 0 0~1
--- 否
是否有真空破坏传感器 0:无 1:有
__NzlSizeChkFlag
= 0 0 0~1
--- 可
使用传感器进行吸嘴尺寸检查(选项功能) 0:没有传感器设置 1:有传感器设置
3/24
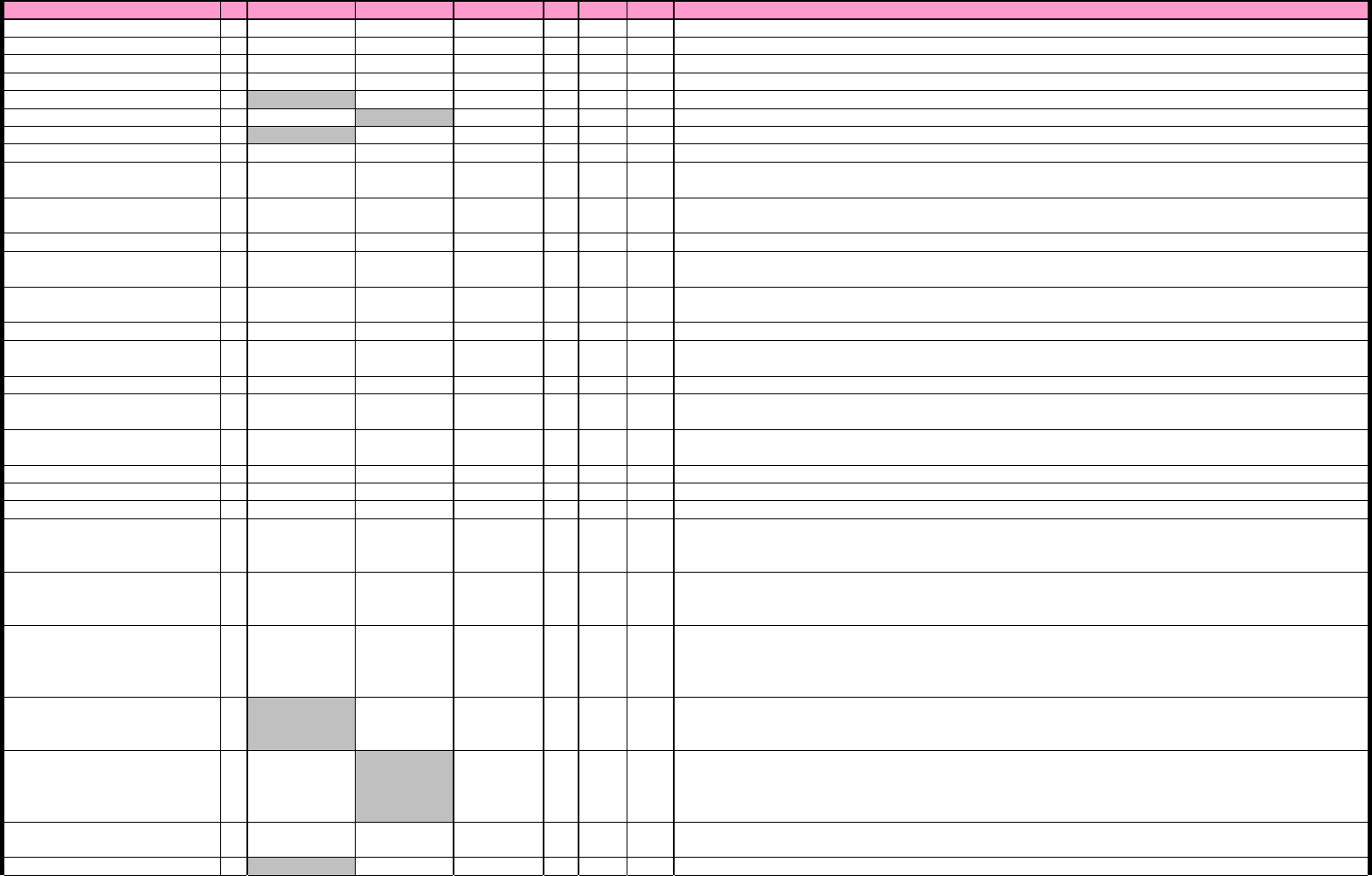
XP 固有値一覧 Type-III V1.51
2007-12-4現在
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
__ErrStopBeforeFid = 0 0 0~1
--- 可
0:在先抓元件的影像处理错误时,机器不读取基准定位点而停止 1:不停止
__MarkEditWndAutoOpen
= 1 1 0~1
---
可
动显示
__OperationPanelDisp = 0 0 0~1
---
可
操作画面切换显示功能(只有在自动运转中有效) 0 : 无效 1 : 有效
__AutoConvWidth = 0 0 0~1
---
可
自动运转开始时,搬运轨道宽度切换功能 0:无效 1:有效
__PlaceUpDelayTimer = 0 10 0~100
---
否
[msec]自动运转中真空破坏确认传感器OFF后到Z轴上升位置的延迟时间
__DisposePosAutoSW = 0 0 0~1
---
可
是否自动判别NG元件废弃处(箱or料盘) 0:参考元件数据 1:自动判别
__NotFeederPrecedenceAction = 0 0 0~1
--- 可
在料盘更换中,是否执行供料器元件的先行动作 0:执行 1:不执行
__FMarkReadBeforePickUp
= 0 0 0~1
--- 可
用TypeII/III读取基准定位点时,是否执行先抓动作 0:执行 1:不执行
__LoggingPort
= 00
0, 8000~
8999
--- 可
生产信息记录、UDP送信用的接口号码(增加版本:TypeI V1.42、TypeII V1.00)
__CCIMFTemplateMode
= 0 0 0~1
--- 可
只有
Vision Type 18
的元件数据
、
模板数据在生产程序(
*.PGO
)内没有发现时
,
使用数据检查
,
来指
定是错误还是从模板文件(*.TPL)读入的切换。
__BrightCheckErrorMode
= 0 0 0~1
--- 可
自动生产中的吸嘴亮度测定出错误发生时,是否中止生产 0:错误停止 1:错误通过
__PreConvCoverInterLock 0 0 0~2
可
在前道工序机器之间的联锁功能
0:动力电源OFF 1:只有在变更搬运轨道宽度时停止 2:无效 ※ 运转准备的重新启动
__NextConvCoverInterLock 0 0 0~2
可
在后道工序机器之间的联锁功能
0:动力电源OFF 1:只有在变更搬运轨道宽度时停止 2:无效 ※ 运转准备的重新启动
__PartLibraryCentricMode
= 0 0 0~1
--- 可
元件数据库中心模式(在读入生产程序时选择是否优先读取数据库的元件数据。) 0:通常模式(默认
__KITServerPort
= 8000 8000
0, 1000~
64000
--- 可 需要
设定KIT Server通信用接口号码。
__FlexaDataShareMode
= 0 0 0~1
--- 可 不
要
设定FujiFlexa数据访问功能。 0:不访问数据 1:访问数据
__FlexaUploadOverride
= 0 0 0~1
--- 可 不要
在
Fuji Flexa
中保存元件数据(形状数据)时指定保存处
。
0:在Override中有数据时保存到为Override,没有时保存到Generic。 1:时常保存在Override
__FlexaOverrideMC = 0 0 0~1
--- 可 不要
指定使用
FujiFlexa
数据访问功能时
Override
机种名
。0:
机器的机种名的
Override。1:
参考保存的
Override进行以下的变更 。
__FlexaServerPort
= 53344 53344 1024~
--- 可 不
要
Fuji Flexa的接口号码
__FlexaLogonType
= 1 1 0~1
--- 可 不
要
使用Fuji Flexa数据访问功能注册到Fuji Flexa的帐户方法。0:注册在机器上的帐户 1:固有值「
__FlexaDataSaveMode
= 0 0 0~2
--- 可 不
要
FujiFlexa数据访问功能设定时的Job保存的访问限制 0:没有限制 1:只能覆盖 2:不可以保存
__FidReadStbChkTimeout = 1000 1000 0~5000
--- 可
等待读取基准定位点结果收敛超时[
ms
]
推荐设定值:1000
※请在主升降器减背压改造机器上使用。
__FidReadStbChkValue
= 5 5 0~20
--- 可
等待读取基准定位点结果收敛判定值
[
μm
]
推荐设定值:5
※请在主升降器减背压改造机器上使用。
__FMarkReadQuickMode
= 0 0 0~2
--- 可
读取基准定位点时的缩时功能(第2个以后不重复读的模式
。
)
0:无效
1:有效
2:第1次的影像处理结果仅仅在既定值内时有效
__FMarkReadLightingMode
= 0 0 0~1
--- 可
在读取基准定位点时使用光源的指定(仅仅是XP242/XP243)
0: 使用中心光源(标准)
1: 不使用中心光源
__SelectVisionStage
= 0 0 0~2
--- 可
在元件影像处理时使用的光源的设定(仅仅是XP142)
※用于光源发生故障时的应急处理
。
0: 自动(标准)
1: Stage1
2: Stage2
__ErrDlgCloseMode
= 0 0 0~1
--- 可 不要
在显示错误画面中启动条件齐备后运转准备按钮处于可以按下的状态
,
是否在按下
SW
后使关闭错误
画面的功能
__MediumPartsRejectTray
= 1 1 0~1
--- 否 不
要
是否使用中型排出盘的指定。 「0」不使用 「1」使用
4/24
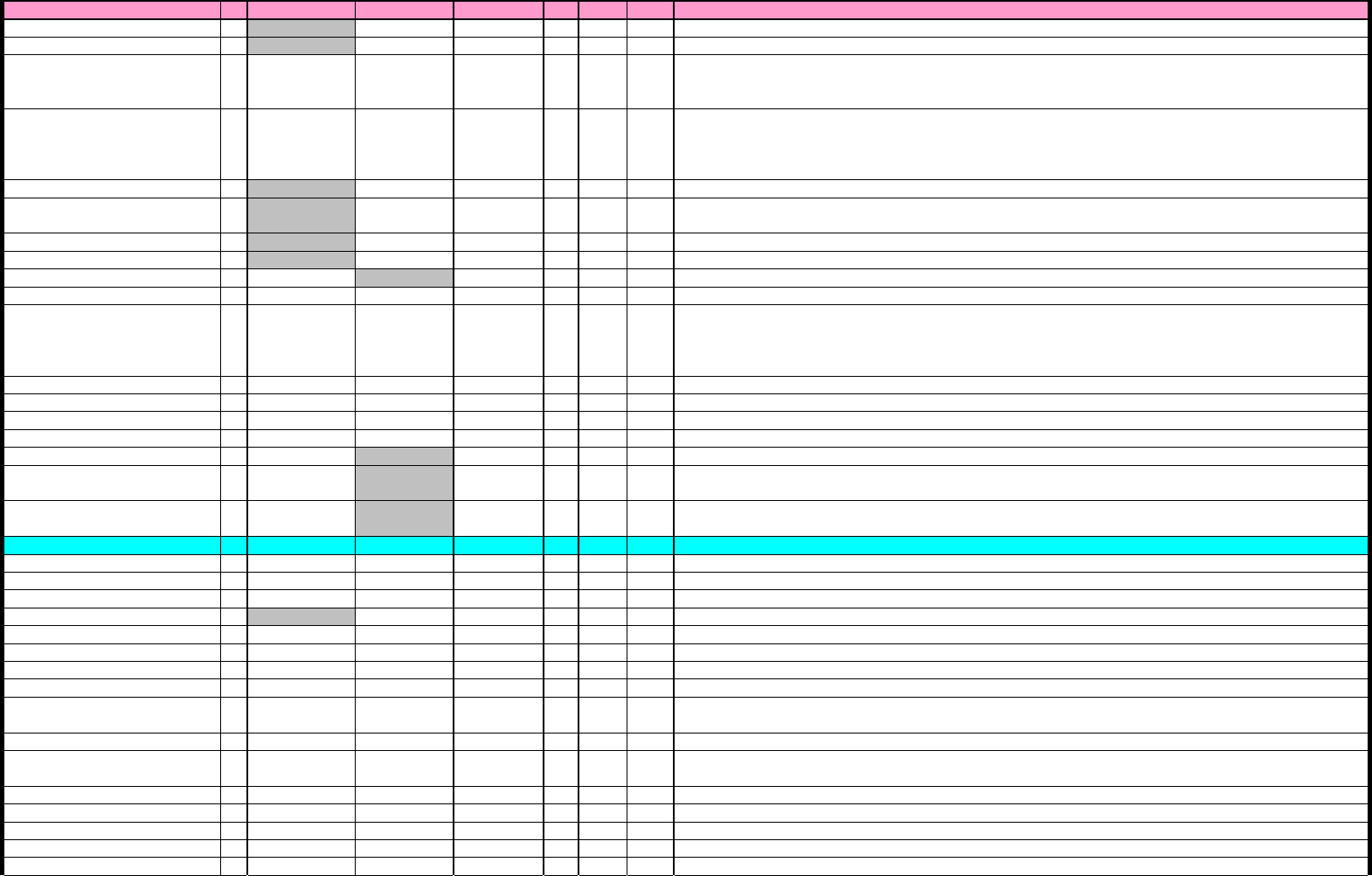
XP 固有値一覧 Type-III V1.51
2007-12-4現在
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
__LeadProtectPickTimer = 0 40 0以上
--- 否 不
要
防止引脚弯曲的吸取下降端时间
__VcmPickChkSensor
= 0 1 0~1
--- 可 不
要
由真空传感器决定是否确认吸取元件 0:不进行 1:进行(进行时有必要调整真空传感器)
__MfuBuzzer = 0 0 0~1
可
MFU上升·下降时鸣响警告音的功能 0:无效 1:有效
__ErrScreenChangeData
= 0 0 0~2
可
在错误画面显示上
,
设定显示的内容
。
0:元件号
1:指令(供料器安装画面)
2:元件号和指令
__MidEjectPartsSize
= 0 20 0~20
--- 可
XP242
的中型排出料盘可以废弃的元件长度[
mm
]
__FeederFlagInitialValue = 0 0 0~4
--- 可
供料器的默认值的设定(仅仅是XP242)
0:N, 1:M1, 2:M2, 3:MF, 4:FIDL读取时的自动设定。
__ConvertPackageType5 = 0 1 0~1
--- 可
p
acka
g
eT
yp
e
自动变换
for
引脚弯曲防止(仅仅是
XP242
)
__KeepTrayData50 = 0 0 0~1
--- 可
是否按
MTU
的各个料槽记忆在过去使用的元件吸取位置信息
0:
无效
1:
有效
__LSafetyCovChk = 0 0 0~1
--- 可 不
要
L
型安全盖罩有无
「
0
」无
「
1
」有
__UseNonDisposeMode = 0 0 0~1
--- 可 不
要
是否使用
Non-dis
p
ose
贴装模式
1:
使用
0:
不使用
__RefRecoveryTimesFrom = 0 0 0~2
--- 可 不要
参考元件数据的「Recovery Times」和[动作条件设定]画面的「补件数」中某一个。
0:以「Recovery Times」为优先参考设定值是“0”的时候参考[动作条件设定]画面。(以前)
1:参考「Recovery Times」。
2:参考[动作条件设定]画面的「补件数」
__UseOutBuffer = 1 1 0~1
--- 可
0:
不使用
OutBuffer。 1:
使用
OutBuffer。
__InBufferWarmup
= 2 2 0~2
--- 可
不要
INBuffer
的准备动作
0:
不使用
1:
仅仅在启动时第
一
次执行
2:
按
一
定周期执行
__OutBufferWarmup = 2 2 0~2
--- 可
不要
OutBuffer
的准备动作
。 0:
不使用
1:
仅仅在启动时第
一
次执行
2:
按
一
定周期执行
__BufferWarmupInterval = 5 5 1~120
--- 可
不要
IN
/
OutBuffer
的准备动作周期[
sec
]
__NzlChangerChkMode = 0 0 0~1
--- 可 不
要
进行存储器的吸嘴尺寸检查的触发器设定
0:
只是在拆下了存储器时
1:
也可以在安全门被打开时
__TapeLeafFloatConfirmMode = 0 0 0~1
--- 可
料带导盖浮起传感器测出后的解除错误的方法
0:安全门的开闭 1:按下信息框的[OK]
__NzlPresenceChkFlag = 0 0 0~3
--- 可
是否执行吸嘴有无检测
0:不执行 1:只是在工作头上执行 2:只是在存储器内执行 3:在工作头和存储器上执行
__________VISION___________ =
__FiducialMarkImperfect = 0 0 0~1
--- 可
需要
是否对应不完全圆形基准定位点 0:不对应 1:对应
__FiducialMeasureFailRatio
= 0 0 0~100
--- 可
基准定位点的影像处理时的Measure查找线失败率「%」。 ※变更固有值后,有必要重新读取程序进
__BoardSkipMarkBrightnessLevel = 0 0 0~255
--- 可
子电路板跳过定位点读取用的亮度阈值 ※输入范围:0~255 (在0以下256以上时设定为
__BottomMarkPresentLevel 0 0 0~255
--- 可 不
要
在判断有无底定位点后,定位点有无亮度差的基准值
__LookUpTableOff
= 0 0 0~1
--- 可
是否进行使用的元件数据的Gain of Contrast Offset的影像的对比度补正 0:有效 1:无
__VT10RecoverySearch
= 1 1 0~1
--- 可
需要
变更VisionType10的影像处理方法后的再次执行检索 0:无效 1:有效
__VT100DustInspectExtendOff = 0 0 0~1
--- 可
需要
在VisionType100的影像处理中提高防尘性的处理设定 0:有效 1:无效
__VT230WideAreaSearch
= 1 1 0~1
--- 可
需要
在VisionType230的影像处理的引脚广范围识别设定 0:无效 1:有效
__BrightCheckErrorOffset
= 15 15 0~255
--- 可
亮度检查的阈值的默认值
。
用目测判断吸嘴中没有异物的状态时在不发生亮度错误的情况下输入数
值。以15前后输入数值。设定了必要值以上的数值时会以有无元件的检查判断为无元件。。
__VisionProcessUpgrade
= 0 0 0~1
--- 可
在VisionType20、180的影像处理中设定是否实施引脚检查。 0:不检查(Result作为1动作)
__MatrixShutterSpeed
= 6200 5000
10000~
30000
--- 可 不要
矩阵测定时的XC-HR50定位点相机快门速度(μsec)的设定。单位[μsec]。
__MarkCameraShutterSpeed
= 4000 5000 0~50000
--- 可
需要
定位点相机用的快门速度(μsec)的设定。单位[μsec](只有XC-HR50、XC-56有效)
__ReversAMPartsLampShutterSpeed = 15000 5000 0以上
--- 可 不
要
背面精度测定元件灯(侧射)用快门速度(μsec)。只有XC-HR50、XC-56有效
__BoardExistCheckBrightnessLevel = 150 150 0~255
--- 否 不
要
是否有子电路板(到达)检测 “刀峰”黑白判断阈值(比值低:黑,比值高:白,但是在0以下或者
__BoardExistCheckWhiteWidthMin = 200000 200000 没有范围
--- 否 不
要
是否有子电路板(到达)检测 裂缝白部宽度最小值[nm](MS单位)
__BoardExistCheckWhiteWidthMax = 1200000 1200000 没有范围
--- 否 不
要
是否有子电路板(到达)检测 裂缝黑部宽度最大值[nm](MS单位)
5/24