Spec of AX-3 AX-5 June 2005 LR.pdf - 第11页
Each placement robot is fitted with a placement head. The placement head executes the following tasks: Z-movement Rz-movement Component alignment Board alignment Force sensing and control Trolley and feeder detection Too…
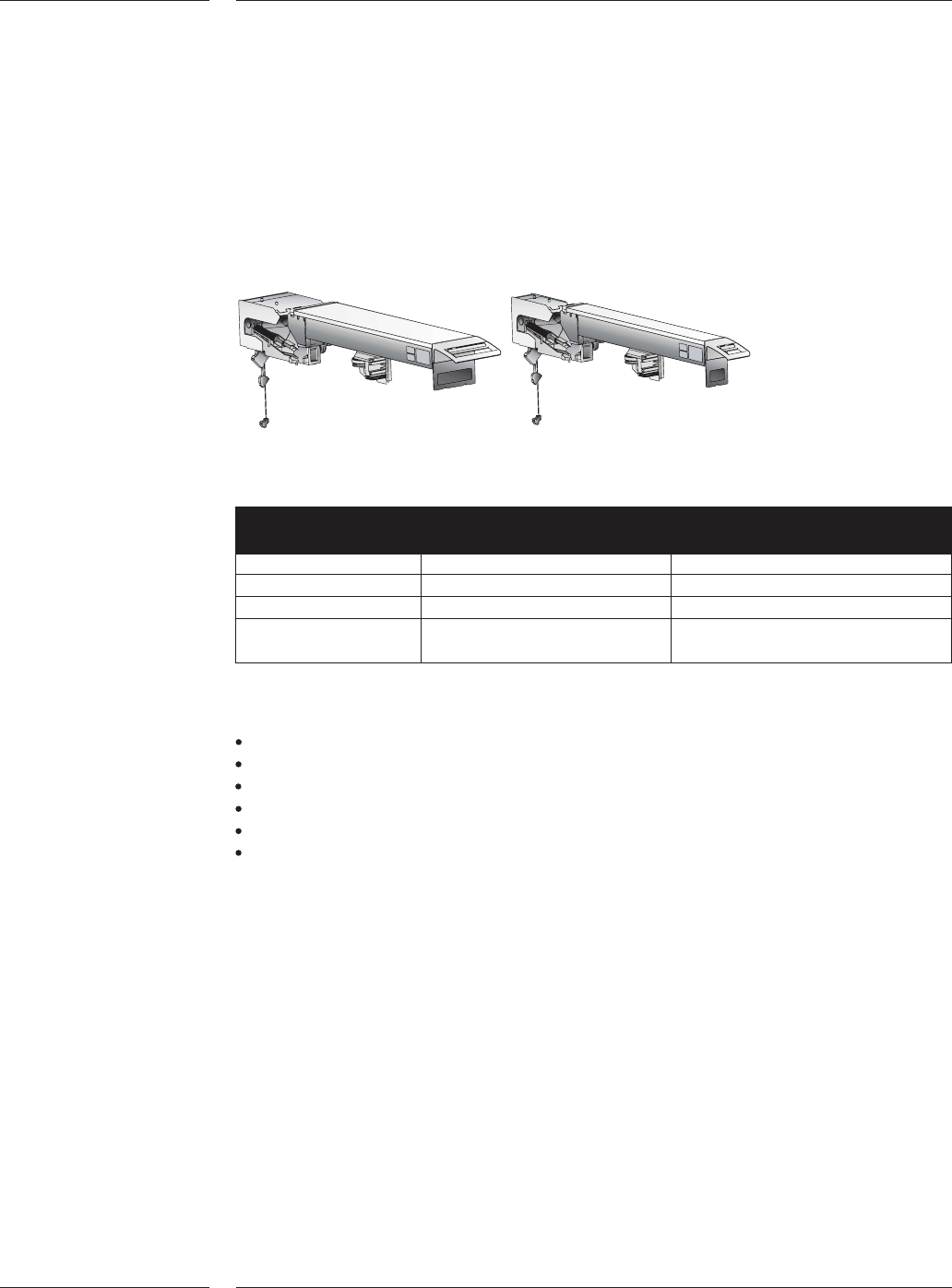
The pick and place module of the AX has three sub modules: the placement robot,
the placement controller and the placement head. The AX can be equipped with two
types of placement robots or a mix of the two; the standard placement robot and
the compact placement robot. Both placement robots use the same hardware and
software and achieve the same specifications. A compact placement robot is half
the width of a standard placement robot. This allows scaling the AX platform in out-
put while maintaining the available feeding positions.
Standard placement robot and compact placement robot
Standard placement Compact placement
robot robot
Working area 200 x 590mm 80 x 590mm
Weight 52 kg 32 kg
Dimensions (LxWxH) 1625 x 240 x 250mm 1625 x 120 x 250mm
Max. number of
partnumbers 26 11
Placement robot specifics:
Direct drive Y spindle using high-resolution rotary encoders
Linear X motor and encoder
Placement head interface
Safety interlocks
Quick exchange connection cables to placement controller
Air controller and local vacuum system (venturi)
2.4 Placement
robot
Figure 2
Contents
8 of 34
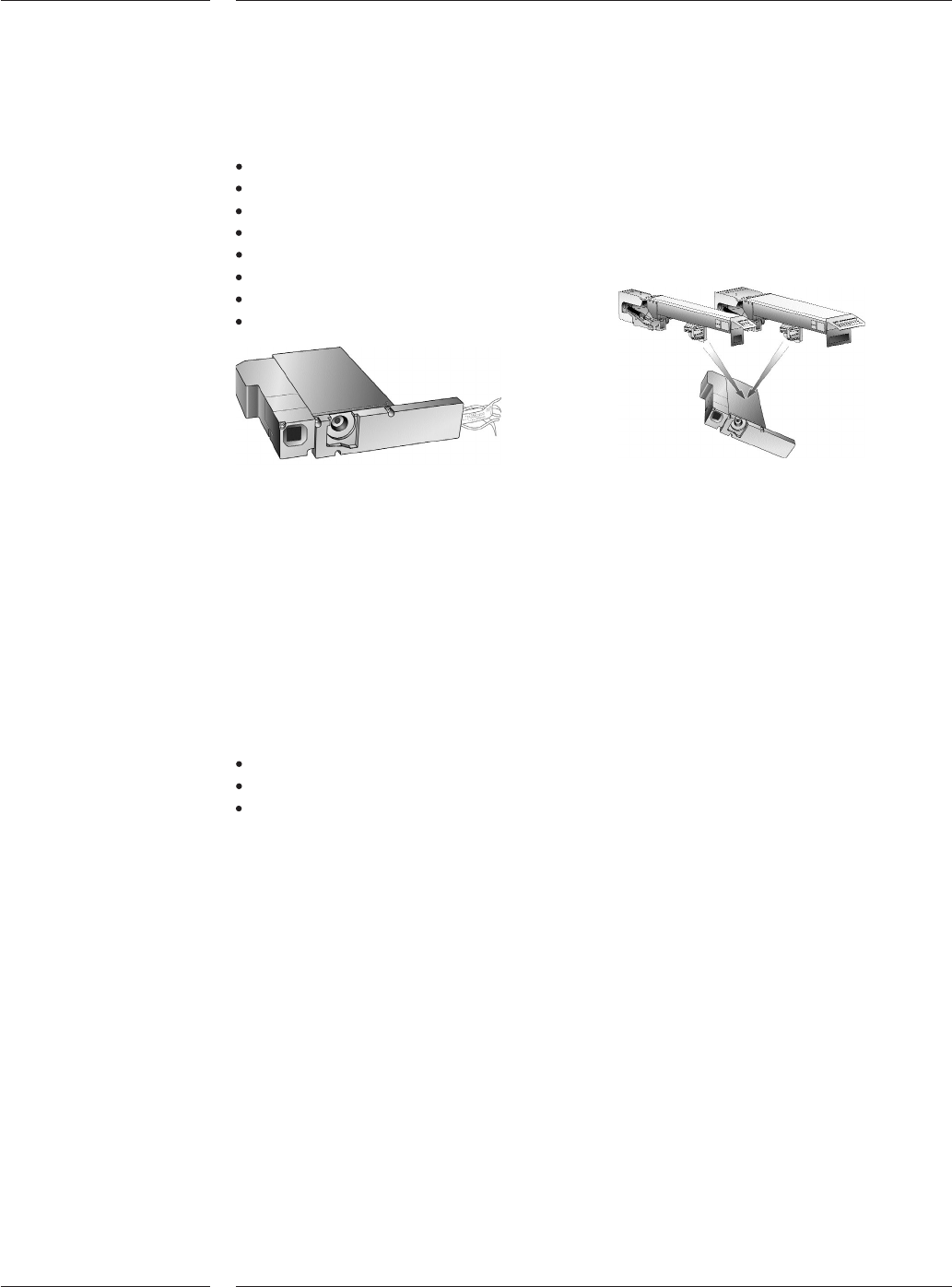
Each placement robot is fitted with a placement head. The placement head
executes the following tasks:
Z-movement
Rz-movement
Component alignment
Board alignment
Force sensing and control
Trolley and feeder detection
Toolbit exchange unit detection
Board warpage correction
Placement head
The Z-stroke uses a linear motor. This linear motor controls the pickup force,
placement Z-speed and placement dwell and impact force.
Board warpage correction
When a board enters the placement area, every placement head measures the
impact position and calculates the appropriate Z-height to correct for any applicable
board warpage. This adaptive Z-height feature enables that the appropriate
placement dwell force and impact force is well within the tolerance of process
requirements.
AX Placement head force specifications
Placement force range 2N to 8N, lower forces with restrictions
Programmable placement force stepsize 0.1N
Placement force control by linear motor current servo loop
2.5 Placement
head
Figure 3
Contents
9 of 34
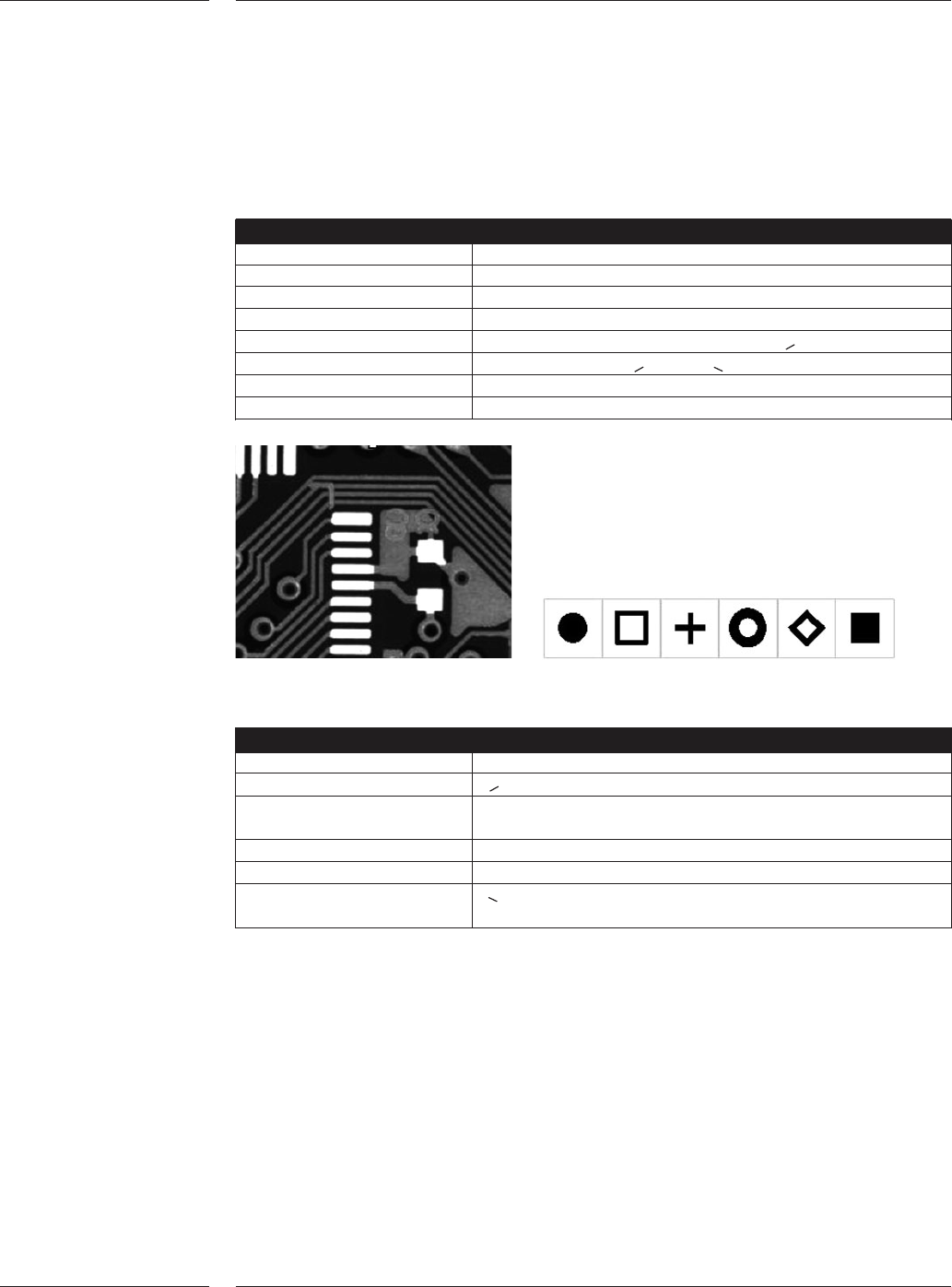
Each placement head has its own board alignment camera. The board alignment
camera is used for fiducial and artwork alignment. The board alignment camera is
also used for the position detection of feeder trolleys, toolbit exchange unit, dump
bin, component vision camera and badmark sensing.
Board alignment camera
Camera Field of View 8.6 x 6.8mm
Camera pixels 1024 x 768
Camera pixel resolution 8.4 µm
Illumination Bright field & dark field
Fiducial types All regular types with a contrast level of >30%
Fiducial shape size Fiducial shape size >0.3mm, <3.0 mm
Free zone around fiducial No features allowed within 0.1mm, no look-a-likes
within 2.6mm from fiducial
Examples of artwork and typical fiducials
Badmark sensing
Bad mark type Black or whyte dot, or fiducial shape
Size >φ 1mm
Color Bad marks can be dark in a light background or light in
a dark background
Contrast At least 30 %
Badmark levels 3
Number of bad marks <2048
per board
2.6 Board
alignment
Figure 4
Features
10 of 34