ReleaseNote_V3.49STD_R4.000_for_V30VGOS.pdf
YAMAMA㻌MOTOR㻌CO.,㻌LTD Robotics㻌Operations 表紙 2018/8/28 ※㻌リリースノートの㻌[機種]㻌列は、以下の定義で記載し ています。 ライン カテゴリ YG12 シリーズ YG300 YS12 シリーズ YS24 シリーズ YS24X シリーズ YS100 YS88 YSH20 YC8 YSP YSP20 YG12㻌 YG300 YS12 YS24SL YS24XSL YS100 YS88 …
YAMAMA㻌MOTOR㻌CO.,㻌LTD
Robotics㻌Operations
表紙 2018/8/28
※㻌リリースノートの㻌[機種]㻌列は、以下の定義で記載しています。
ライン
カテゴリ
YG12
シリーズ
YG300 YS12
シリーズ
YS24
シリーズ
YS24X
シリーズ
YS100 YS88 YSH20 YC8 YSP YSP20
YG12㻌 YG300 YS12 YS24SL YS24XSL YS100 YS88 YSH20-FF YC8 YSP YSP20
YG12F YS12P YS24DL YS24XDL YSH20-4M
YS12F YS24DS YS24XDS
VGOSソフトウェアリリースノート
シリーズ
機種
全マシン
V3.49STDR4.000
VGOSソフトウェアV3.49STDR4.000を発行します
マウンタ
YS㻌シリーズYGシリーズ
印刷機
MDOCV30-00001 1/4
YAMAMA㻌MOTOR㻌CO.,㻌LTD
Robotics㻌Operations
Release㻌Note 2018/8/28
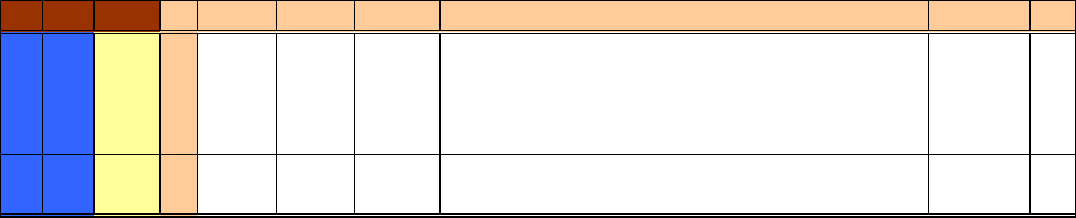
Ver
VerVer
Ver Rev
RevRev
Rev 照合No
照合No照合No
照合No Ref
RefRef
Ref 分類
分類分類
分類 機種
機種機種
機種 キーワード
キーワードキーワード
キーワード 内容
内容内容
内容 処理結果
処理結果処理結果
処理結果
別資
別資別資
別資
料
料料
料
3.49 4.000 TK57215
TK57215TK57215
TK57215 1
11
1 機能追加 YSP 搬送
[マシン設定]-[マシンデータ]-[機械座標]-[位置座標/仕様]-[高速同時搬送設定]で、
高速同時搬送の「使用」または「未使用」が設定できる機能を追加しました。(初期値は
「使用」です)
「使用」:印刷済み基板が、出口位置への搬送完了を待たずに次基板を印刷位置搬送
する
「未使用」:印刷済み基板が、出口位置への搬送完了後に次基板を印刷位置搬送する
※Y.FcaTの対応バージョンは、V1.65STDR1.000以降です。
対応しました。
3.49 4.000 TK53351
TK53351TK53351
TK53351 2
22
2 不具合 マシン共通 表示灯
表示灯点灯条件編集機能にて、生産予定枚数完了の[ブザー]を「ON」に設定した場
合、「Ea902:生産枚数が生産予定枚数に達しました」を表示する前に表示灯点灯及び
ブザーONのみ先に行われてしまう不具合がありました。
対応しました。
MDOCV30-00001 2/4
YAMAMA㻌MOTOR㻌CO.,㻌LTD
Robotics㻌Operations
Cover 2018/8/28
※㻌The㻌column㻌of㻌[Type]㻌in㻌the㻌release㻌note㻌is㻌defined㻌as㻌follows
Line
Category
YG12
Series
YG300 YS12
Series
YS24
Series
YS24X
Series
YS100 YS88 YSH20 YC8 YSP YSP20
YG12㻌 YG300 YS12 YS24SL YS24XSL YS100 YS88 YSH20-FF YC8 YSP YSP20
YG12F YS12P YS24DL YS24XDL YSH20-4M
YS12F YS24DS YS24XDS
VGOSSoftwareReleaseNote
V3.49STDR4.000
Type
All㻌Machine
Series
YG㻌Series YS㻌Series
Mounter Printer
MDOCV30-00001 3/4