FX-1R机器控制参数.pdf - 第63页
FX-1/FX-1R 机器控制参数 R e v 2 . 0 0 4-37 (5) 设置 № 类别 内 容 1 0 Y 轴左侧 (伺服) 2 1 Y 轴右侧 (伺服) 3 2 X 轴左侧 (线性) 4 3 X 轴右侧 (线性) 5 4 Z 轴左 1 贴片头 (伺服) 6 5 θ 轴左 1 贴片头 (伺服) 7 6 Z 轴 L2 贴片头 (伺服) 8 7 θ 轴 L2 贴片头 (伺服) 9 8 Z 轴 L3 贴片头 (伺服) 10 9 θ …
FX-1/FX-1R 机器控制参数 Rev2.00
4-36
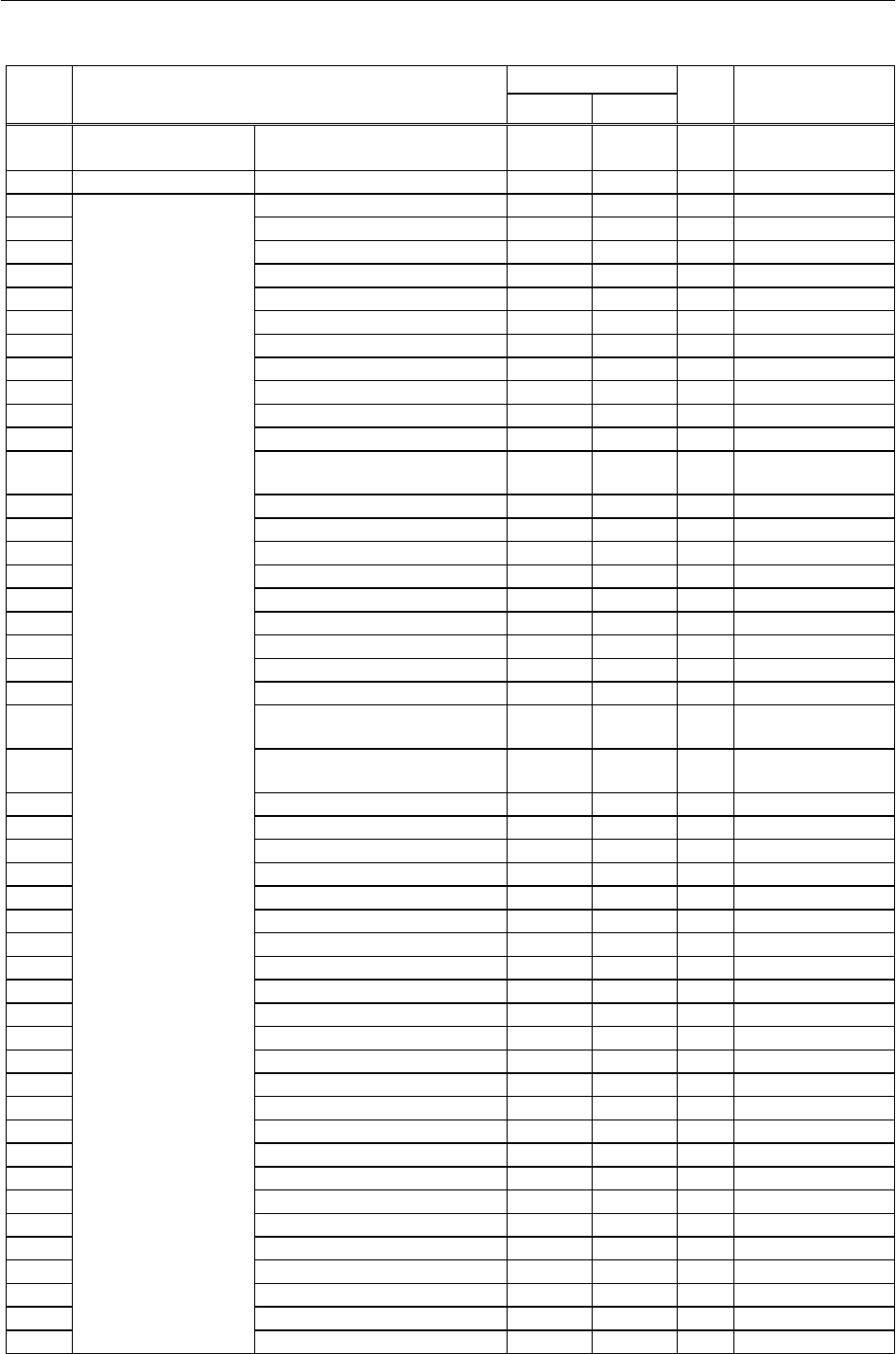
(3)设置项目(步进马达)
输入范围
№
项目
最小值 最大值
单
位
备考
1
伺服参数
控制参数
2
设置
0 25
(5)
設定参照
3
控制选项1
Pr.No 0200
4
控制选项2
Pr.No 0201
5
控制选项3
Pr.No 0202
6
-
Pr.No 0203
7
-
Pr.No 0204
0205
8
粗统一输出范围(下位)
Pr.No 0206
9
粗统一输出范围(上位)
Pr.No 0207
10
反作用力修正量
Pr.No 0208
11
-
Pr.No 0209
12
组号码
Pr.No 020A
13
插入直线控制选项
Pr.No 020B
14
插入直线速度限制值
Pr.No 020C
020D
15
-
Pr.No 020E
16
-
Pr.No 020F
17
速度选项
Pr.No 0210
18
-
Pr.No 0211
19
速度限制值
pps
Pr.No 0212
0213
20
起动速度
pps
Pr.No 0214
0215
21
-
Pr.No 0216
22
紧急停止时系数
ms Pr.No 0217
23
软限制上限
Pr.No 0218
0219
24
软限制下限
Pr.No 021A
021B
25
位置开关上限
Pr.No 021C
021D
26
位置开关下限
Pr.No 021E
021F
27
-
Pr.No 0220
28
-
Pr.No 0221
29
原点复位速度
pps
Pr.No 0222
0223
30
原点复位加速时系数
ms Pr.No 0224
31
原点复位减速时系数
ms Pr.No 0225
32
原点坐标
Pr.No 0226
0227
33
-
Pr.No 0228
0229
34
-
Pr.No 022A
35
-
Pr.No 022B
36
夹速度
pps Pr.No 022C
37
-
Pr.No 022D
38
-
Pr.No 022E
022F
39
电子齿轮分子
Pr.No 0230
0231
40
电子齿轮分母
Pr.No 0232
0233
41
速度单位倍数
Pr.No 0234
0235
42
原点扫描限制(下位)
Pr.No 0236
43
原点扫描限制(上位)
Pr.No 0237
44
-
Pr.No 0238
45
-
Pr.No 0239
46
-
Pr.No 023A
47
-
Pr.No 023B
48
厂商设置用
Pr.No 023E
49
参数值
厂商设置用
Pr.No 023F
FX-1/FX-1R 机器控制参数 Rev2.00
4-37
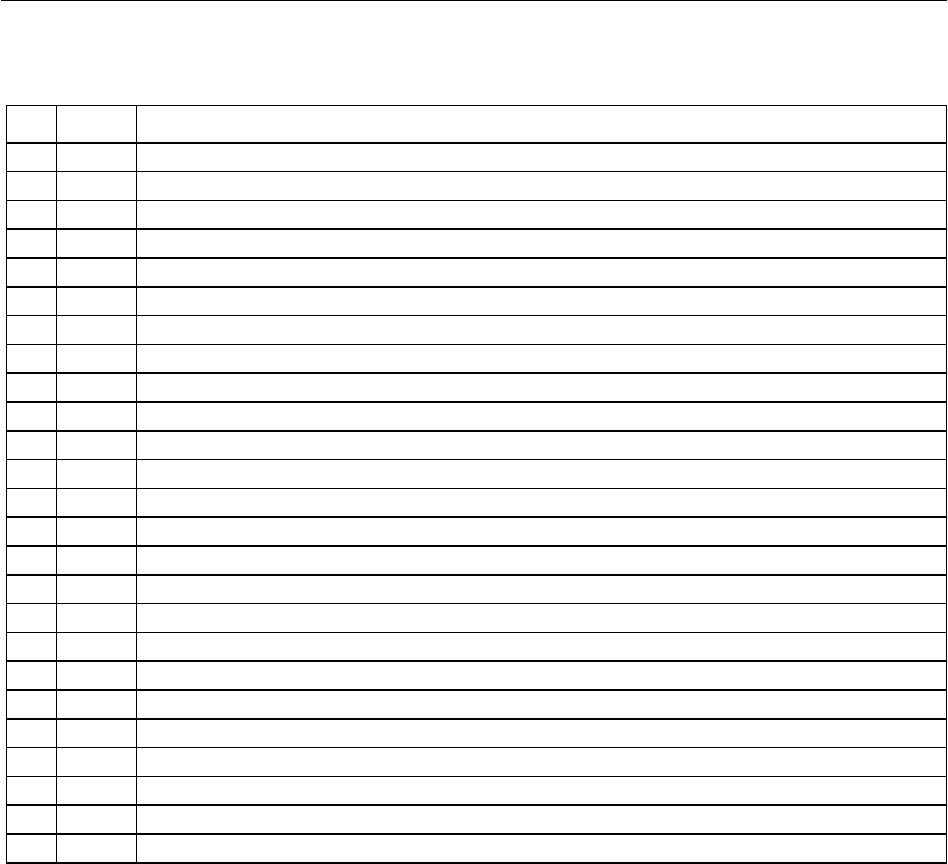
(5)
设置
№
类别 内 容
1 0
Y
轴左侧
(伺服)
2 1
Y
轴右侧
(伺服)
3 2
X 轴左侧 (线性)
4 3
X 轴右侧 (线性)
5 4
Z 轴左 1 贴片头 (伺服)
6 5
θ
轴左
1
贴片头
(伺服)
7 6
Z
轴
L2
贴片头
(伺服)
8 7
θ 轴 L2 贴片头 (伺服)
9 8
Z 轴 L3 贴片头 (伺服)
10 9
θ 轴 L3 贴片头 (伺服)
11 10
Z 轴左 4 贴片头 (伺服)
12 11
θ
轴左
4
贴片头
(伺服)
13 12
Z 轴右 1 贴片头 (伺服)
14 13
θ 轴右 1 贴片头 (伺服)
15 14
Z
轴
R2
贴片头
(伺服)
16 15
θ 轴 R2 贴片头 (伺服)
17 16
Z
轴
R3
贴片头
(伺服)
18 17
θ 轴 R3 贴片头 (伺服)
19 18
Z 轴右 4 贴片头 (伺服)
20 19
θ 轴右 4 贴片头 (伺服)
21 20
Y
台轴
(伺服)
22 21
支撑台马达 (步进)
23 22
CENTER 自动宽度调整马达(步进)
24 23
中心马达 (步进)
25 24
IN/OUT 自动宽度调整马达 (步进)
FX-1/FX-1R 机器控制参数 Rev2.00
4-38
4.2.9
4.2.94.2.9
4.2.9 Y
YY
Y 设置
设置设置
设置
图
图图
图
4.2
4.24.2
4.2-
--
-12
1212
12
Y
YY
Y 设置
设置设置
设置
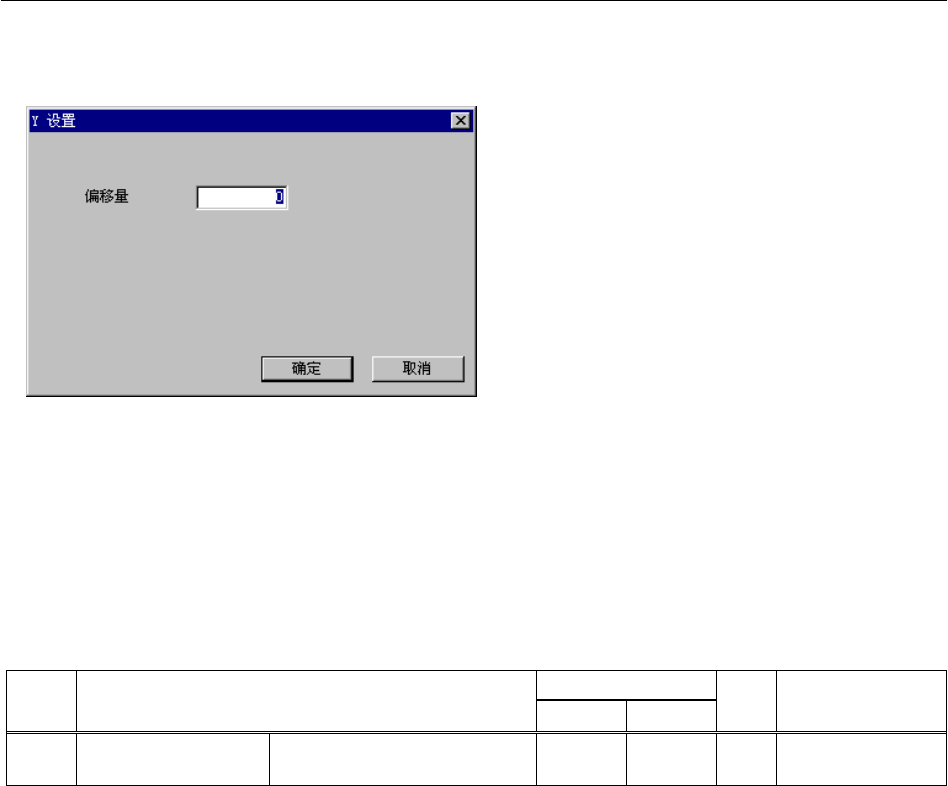
(1) 设置画面的显示方法
菜单: [输入]→[XY]→[伺服参数]→[Y 设置]
起动: [XY]按键→[伺服参数]Tab→[Y 设置]按键
(2)设置项目
输入范围
№
项目
最小值 最大值
单
位
备考
1
偏移量
0.1
µm