00195794-0102_UM_D4_ZH.pdf - 第99页
用户手册 SIPLACE D4 3 贴片机的技术数据 源自软件版本 SR.605.xx 07/2008 英文版 3.5 贴片头 99 3.5.1.3 使用真空泵的操作 12 段位器收集贴片头可以进行转换以适应真 空泵的操作,从而更有效地制造真空 状态 (见第 6.12 节,第 245 页) 。 程序设定功率级 1 2 3 4 5 程序设定的贴片力 [N] 2.4 ± 0.5 2.4 ± 0.5 3 + 1 4 + 1 5 + 1 吸嘴类…
3 贴片机的技术数据 用户手册 SIPLACE D4
3.5 贴片头 源自软件版本 SR.605.xx 07/2008 英文版
98
的芯片贴片枪。这不仅能节省空间:直径越小,离心力越小,这与一般的芯片贴片枪不同。还极
大地减少了在传送过程中,元件滑落的危险。
另一个优点是:收集 & 贴片头的循环时间与所有的元件都相同,换句话说,贴片速率不取决于元
件的大小。
3.5.1.2 技术数据
3
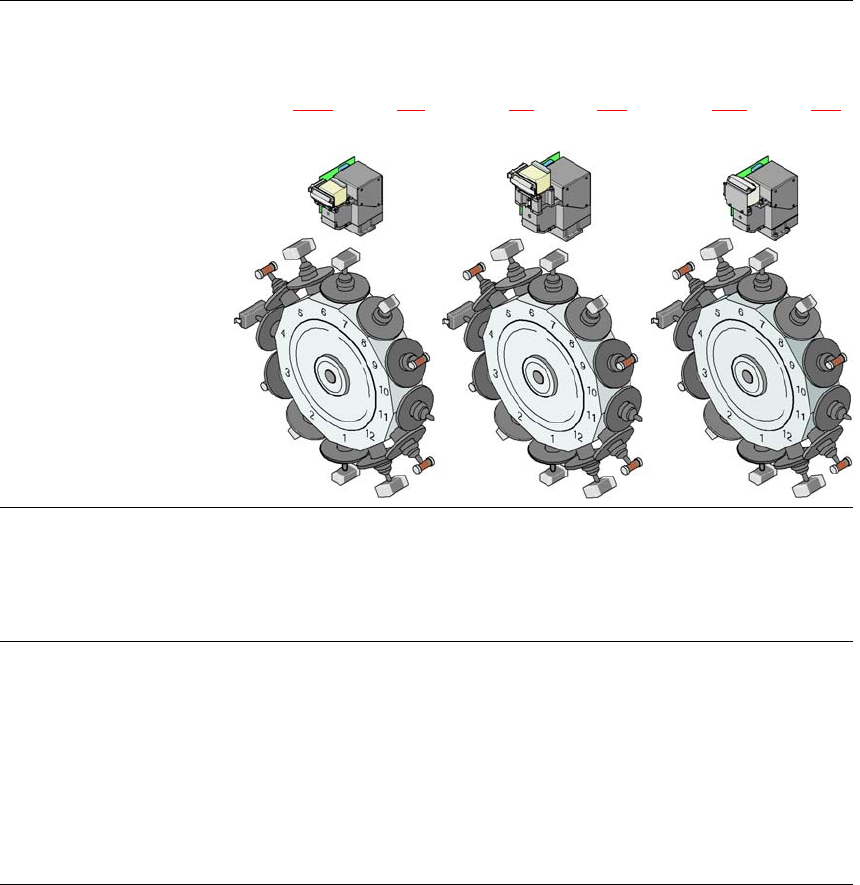
12 段位器收集贴片头,
带有元件照相机 (28
型, 18 x 18,数字)
(见第 3.8.1
节,第 116
页)
12 段位器收集贴片头,
带有元件照相机 (29
型, 27 x 27,数字)
(见第 6.9 节,第 243
页)
12 段位器收集贴片头,
带有元件照相机 (38
型, 16 x 16,数字)
(见第 6.10 节,第 244
页)
元件范围
a
从 0402 到 PLCC44、
BGA、 μBGA、倒装片、
TSOP、 QFP、 SO 至
SO32、 DRAM
从 0201
b
到倒装片、
bare die、 PLCC44、
BGA、 *BGA、 TSOP、
QFP、 SO 至 SO32、
DRAM
01005
c
至 16 x 16 mm²
元件规格
最大高度
最小管脚间距
最小管脚宽度
最小球面间距
最小球面管脚直径
最小尺寸
最大尺寸
最大重量
6 mm
0.5 mm
0.2 mm
0.35 mm
0.2 mm
1.0 x 0.5 mm²
18.7 x 18.7 mm²
2 g
6 mm
0.3 mm
0.15 mm
0.25 mm
0.14 mm
0.6 x 0.3 mm²
b
18.7 x 18.7 mm²
2 g
6 mm
0.25 mm
0.1 mm
0.25 mm
0.14 mm
0.4 x 0.2 mm²
16 x 16 mm²
2 g
用户手册 SIPLACE D4 3 贴片机的技术数据
源自软件版本 SR.605.xx 07/2008 英文版 3.5 贴片头
99
3.5.1.3 使用真空泵的操作
12 段位器收集贴片头可以进行转换以适应真空泵的操作,从而更有效地制造真空状态 (见第
6.12
节,第 245 页)。
程序设定功率级
1
2
3
4
5
程序设定的贴片力 [N]
2.4 ± 0.5
2.4 ± 0.5
3 + 1
4 + 1
5 + 1
吸嘴类型
9xx 9xx 9xx
X/Y 轴精确度
d
± 50 μm/3σ, ± 67 μm/4σ ± 50 μm/3σ, ± 67 μm/4σ ± 50 µm/3σ, ± 67 µm/4σ
角度精确度
± 0.53°/3σ, ± 0.71°/4σ ± 0.53°/3σ, ± 0.71°/4σ ± 0.53°/3σ, ± 0.71°/4σ
元件范围
98% 98.5% 96%
元件照相机类型
28 29 38
照明级别
555
可能的照明级别设置
256
5
256
5
256
5
a) 请注意,可以放置的元件范围还会受到衬垫几何形状、客户特定的标准和封装公差的影响。
b) 带有 0201 封装
c) 带有 01005 封装
d) 精确值可使用与厂商无关的 IPC 标准测量得出
3 贴片机的技术数据 用户手册 SIPLACE D4
3.6 悬臂系统 源自软件版本 SR.605.xx 07/2008 英文版
100
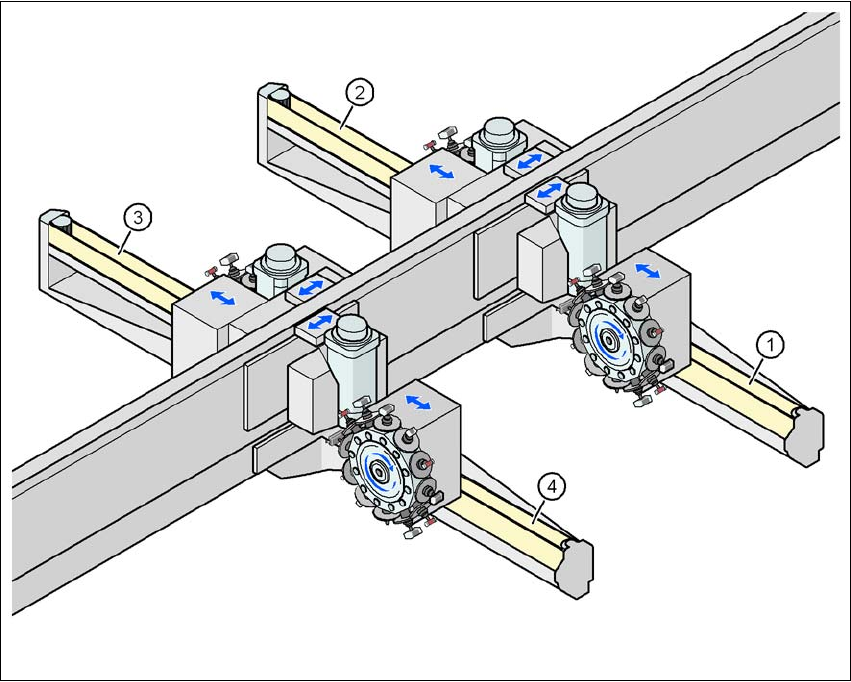
3.6 悬臂系统
3.6.1 悬臂位置
3
图
3.6 - 1
悬臂位置
(1) 悬臂 1
(2) 悬臂 2
(3) 悬臂 3
(4) 悬臂 4
悬臂系统由两个功能组构成:
– X 轴
– Y 轴
贴片区 2
贴片区 1