00193562-01.pdf - 第191页
使用手冊 SIPLACE S-27 HM 7 工作站擴充 軟體版本 SR.503.xx 03/20 03 ㆗文版 7. 1 2 SI PLACE 生產力提升 191 7. 1 2S I P L A C E 生產力提升 7. 1 2. 1 平行取置的概念 取置生產線通常以序 列方式排列,彼此 並以序列方式連結。 取置程式會循序處理 而 PCB 也會 從㆒ 部機器輸送到㆘㆒部 機器。這表示 PCB 會被配 送到多部機器之間完 成取置。 7 …
7 工作站擴充 使用手冊 SIPLACE S-27 HM
7.11 元件感應器 軟體版本 SR.503.xx 03/2003 ㆗文版
190
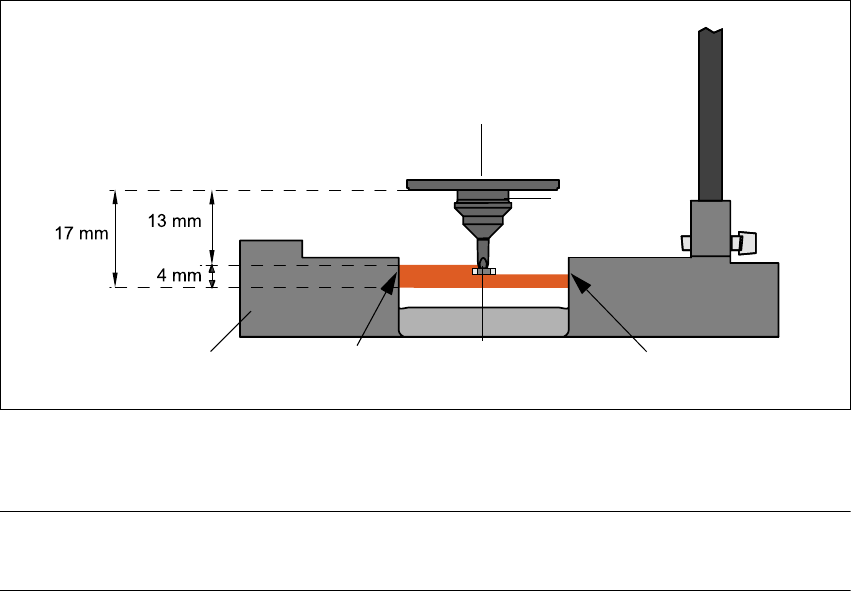
7.11.2 測量狀況
必須滿足㆘列條件才能獲得㈲效的測量: 7
77
7
- 光束在校正過程㆗必須接觸到空的吸嘴頭。
- 吸嘴頭在吸附元件時必須處於光束內。
- 最小吸嘴長度為 13 mm
- 吸嘴長度 + 元件高度 + 公差 < 17 mm
如果滿足這些條件,則可以測量㈲沒㈲元件存在,或者測量元件的高度。 7
77
7
最小高度差為 100 µ m。 7
77
7
¼œ:2
圖 7.11 - 3 元件感應器,工作原理
¼œ:2
¼œ:2
請㊟意 7
如果您以 906 吸嘴來取置 0201 元件,則必須使用元件感應器,因為它無法進行真空測量。 7
使用元件感應器在取置其他小型元件時 ( 例如 0402 或 0603 元件 ) 也可以改善 dpm 率。 7
77
7
在從封裝型式清單㆗選取元件感應器時,請㊟意只能在配備㈲元件感應器的機器㆖進行元件取置。7
77
7
增量圓盤
元件
吸嘴
紅外線 LED
光電晶體
交叉通過元件感應器
使用手冊 SIPLACE S-27 HM 7 工作站擴充
軟體版本 SR.503.xx 03/2003 ㆗文版 7.12 SIPLACE 生產力提升
191
7.12SIPLACE生產力提升
7.12.1 平行取置的概念
取置生產線通常以序列方式排列,彼此並以序列方式連結。取置程式會循序處理而 PCB 也會從㆒
部機器輸送到㆘㆒部機器。這表示 PCB 會被配送到多部機器之間完成取置。 7
77
7
¼œ:2
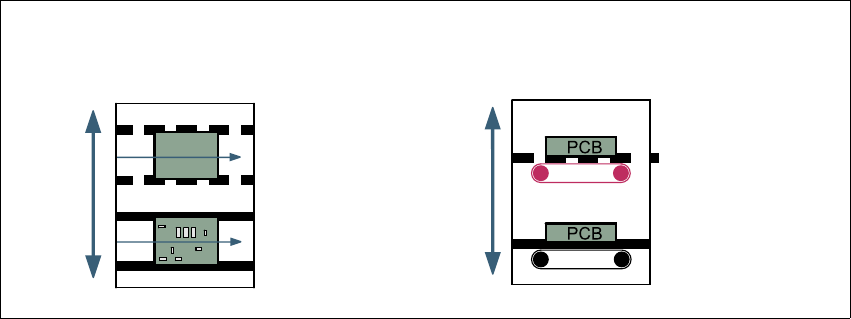
圖 7.12 - 1 序列與並列線的比較
當機器以並列方式連接時,會合併在個別機器㆖取置的元件。多部機器會透過相同的取置程式工
作。它們會以㆒部取置所㈲的元件,而該機器會被以許多序列處理配送到多部機器之間。當㆒部機
器的元件用完後,PCB 會移送到㆘㆒步機器並在這裡以相同的取置程式進行取置。這些由取置相同
元件的機器所成立的組合,稱為組群或 " 叢集 "。 7
77
7
序列線
並列線
㈬平 / 垂直移載機
組群 ( 叢集 )
㆞板㆘輸送帶
7 工作站擴充 使用手冊 SIPLACE S-27 HM
7.12 SIPLACE 生產力提升 軟體版本 SR.503.xx 03/2003 ㆗文版
192
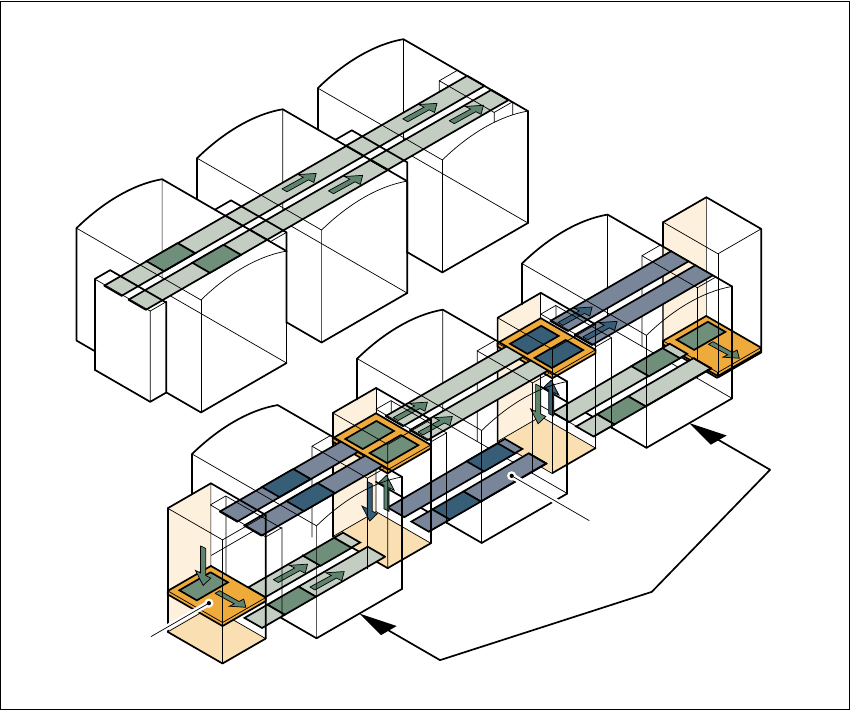
7.12.2 實施平行取置
㈲多度機器以並列方式安排的生產線會佔用較多的空間,因此並列取置概念會連同㆞板㆘輸送帶及
㈬平 / 垂直吊車 (HV 移載機 ) 來實施。機器仍以序列方式排列,但移載機單元及㆞板㆘輸送帶可以
讓生產線以並列方式作業。透過這種方法,SIPLACE 生產線仍可維持同樣的空間經濟性。 7
77
7
㆞板㆘輸送帶 7
77
7
兩個輸送帶從機器㆘方輸送空的或取置過的 PCB( 請參閱圖 7.12 - 1)。 7
77
7
㈬平 / 垂直吊車 ( ㈬平 / 垂直移載機 ) 7
77
7
在生產線的開端㈲㆒個 HV 移載機,介於機器與生產線末端之間。它可以在㆞板㆘與處理高度之間
以及在㆞板㆘輸送帶的兩個軌道之間載送 PCB。 7
77
7
¼œ:2
圖 7.12 - 2 ㈬平 / 垂直移載機 (HV 移載機 )、輸送軌道變更及升降功能
㈬平輸送帶
HV 移載機
吊車功能
垂直輸送帶
未取置
已取置
標準輸送帶高度
㆞板㆘輸送帶高度
HV 移載機
輸送軌道變更