_FX-3R_机器控制参数.pdf - 第32页
Rev 4 .0 机器控制参数 No. 项目 Symbol 输入范围 单位 备考 最小值 最大值 0260 插入直线组号 LGRP Pr.No 0260 0261 插入直线选项 LOP Pr.No 0261 0262 0263 插入直线速度限制值 LSL Pr.No 0262 0264 并列驱动组 TGRP Pr.No 0264 0265 並列驱动同步有効幅 TEV 指令单位 Pr.No 0265 0266 並列驱动同步速度 TES P…
Rev4.0
机器控制参数
No.
项目
Symbol
输入范围
单位
备考
最小值
最大值
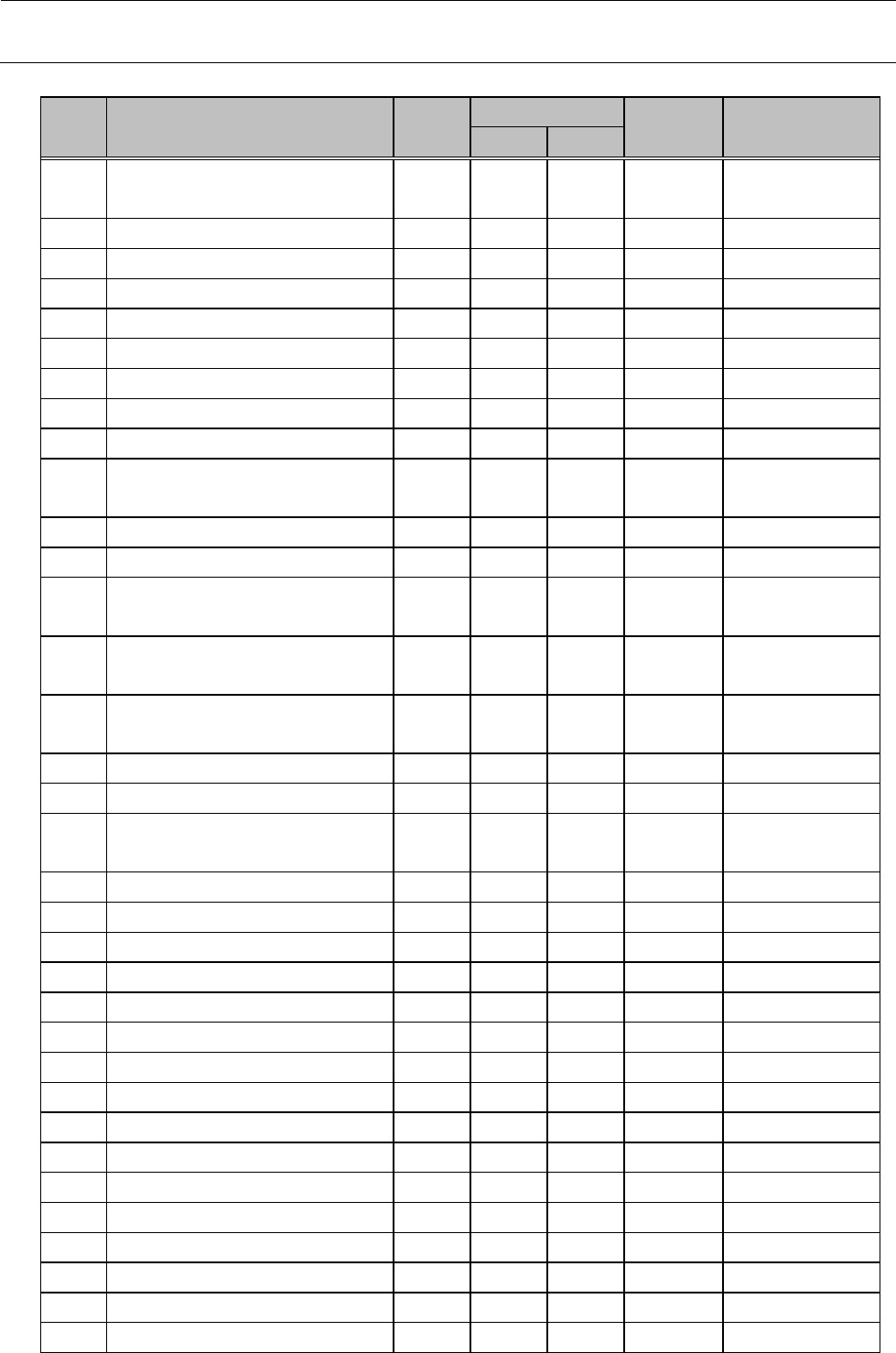
0238
0239
干涉检测幅 IW Pr.No 0238
023A 厂商设置用 Pr.No 023A
023B 厂商设置用 Pr.No 023B
023C 厂商设置用 Pr.No 023C
023D 厂商设置用 Pr.No 023D
023E 厂商设置用 Pr.No 023E
023F 厂商设置用 Pr.No 023F
0240 返回原点选项1 OPZ1 Pr.No 0240
0241 返回原点选项2 OPZ2 Pr.No 0241
0242
0243
返回原点速度 ZSP 速度单位 Pr.No 0242
0244 返回原点加速时常数 ZTCA ms Pr.No 0244
0245 返回原点减速时常数 ZTCD ms Pr.No 0245
0246
0247
原点坐标 ZPS 指令单位 Pr.No 0246
0248
0249
原点偏移量 ZST 指令单位 Pr.No 0248
024A
024B
原点检索限度 ZL Pr.No 024A
024C Creep速度 CRF 速度单位 Pr.No 024C
024D 原点多圈旋转数据 LSO Pr.No 024D
024E
024F
原点1圈旋转位置 CYO Pr.No 024E
0250 厂商设置用 Pr.No 0250
0251 厂商设置用 Pr.No 0251
0252 厂商设置用 Pr.No 0252
0253 厂商设置用 Pr.No 0253
0254 厂商设置用 Pr.No 0254
0255 厂商设置用 Pr.No 0255
0256 厂商设置用 Pr.No 0256
0257 厂商设置用 Pr.No 0257
0258 厂商设置用 Pr.No 0258
0259 厂商设置用 Pr.No 0259
025A 厂商设置用 Pr.No 025A
025B 厂商设置用 Pr.No 025B
025C 厂商设置用 Pr.No 025C
025D 厂商设置用 Pr.No 025D
025E 厂商设置用 Pr.No 025E
025F 厂商设置用 Pr.No 025F
2-24
Rev4.0
机器控制参数
No.
项目
Symbol
输入范围
单位
备考
最小值
最大值
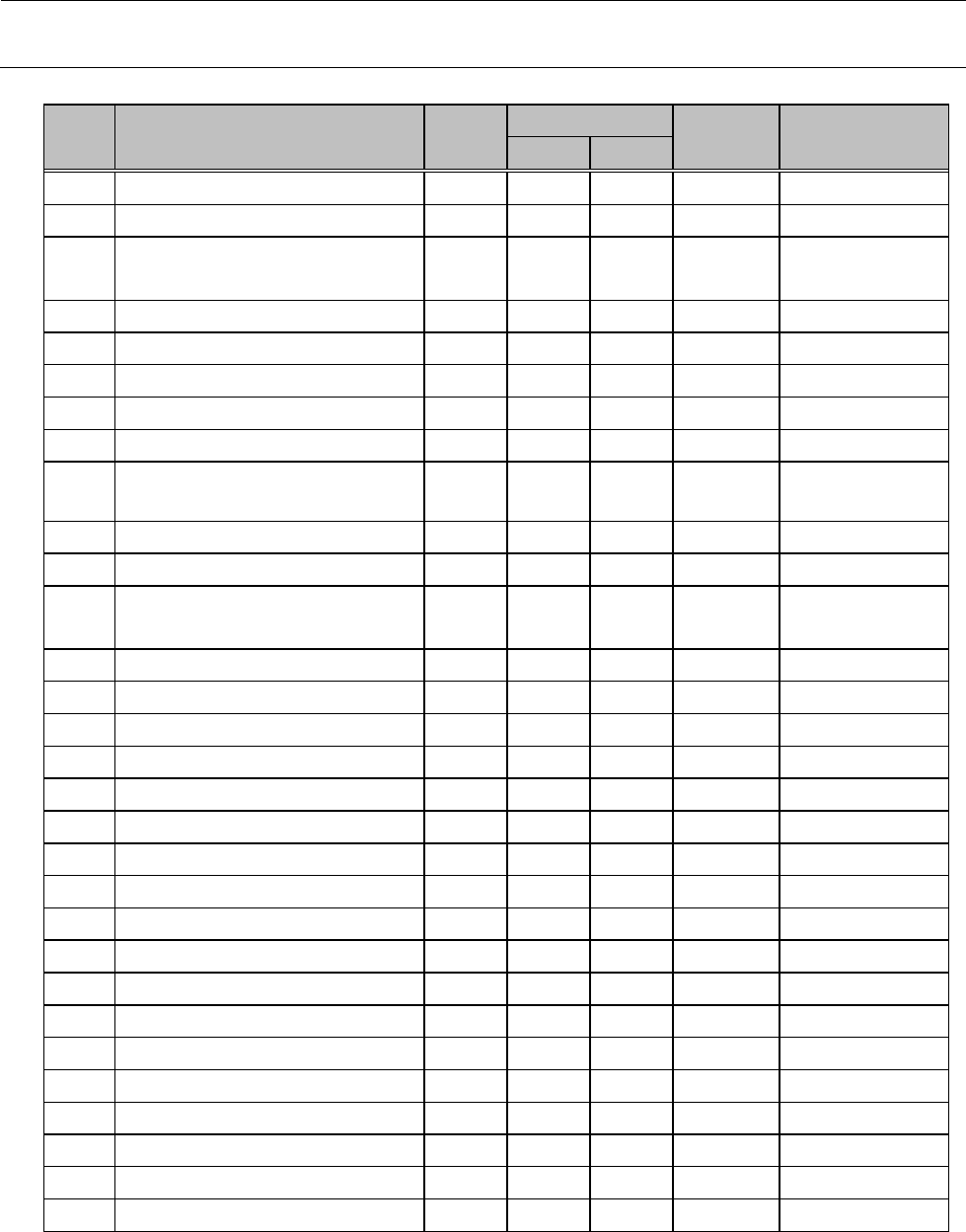
0260 插入直线组号 LGRP Pr.No 0260
0261 插入直线选项 LOP Pr.No 0261
0262
0263
插入直线速度限制值 LSL Pr.No 0262
0264 并列驱动组 TGRP Pr.No 0264
0265 並列驱动同步有効幅 TEV 指令单位 Pr.No 0265
0266 並列驱动同步速度 TES Pr.No 0266
0267 並列驱动偏差过大幅 TEO 指令单位 Pr.No 0267
0268 並列驱动轴单位倍率 TMAG Pr.No 0268
0269
并列驱动偏差查出过大开始延
迟
TED ms Pr.No 0269
026A 并列驱动偏移校正允许幅 TOFL 指令单位 Pr.No 026A
026B 並列驱动原点信号偏移量 TZOF Pr.No 026B
026C
026D
厂商设置用 Pr.No 026C
026E 厂商设置用 Pr.No 026E
026F 厂商设置用 Pr.No 026F
0270 厂商设置用 Pr.No 0270
0271 厂商设置用 Pr.No 0271
0272 厂商设置用 Pr.No 0272
0273 厂商设置用 Pr.No 0273
0274 厂商设置用 Pr.No 0274
0275 厂商设置用 Pr.No 0275
0276 厂商设置用 Pr.No 0276
0277 厂商设置用 Pr.No 0277
0278 厂商设置用 Pr.No 0278
0279 厂商设置用 Pr.No 0279
027A 厂商设置用 Pr.No 027A
027B 厂商设置用 Pr.No 027B
027C 厂商设置用 Pr.No 027C
027D 厂商设置用 Pr.No 027D
027E 厂商设置用 Pr.No 027E
027F 厂商设置用 Pr.No 027F
2-25
Rev4.0
机器控制参数
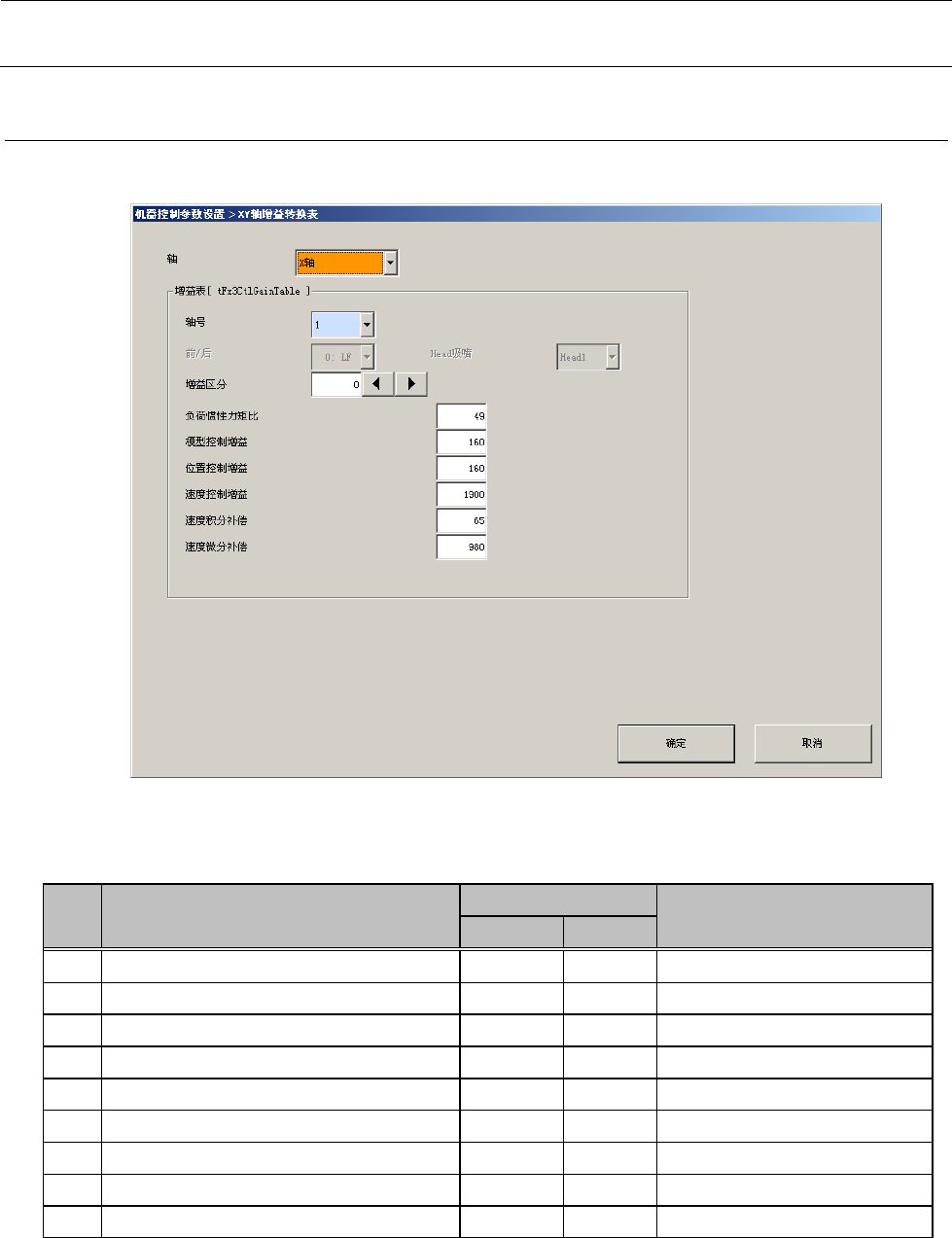
2-2-6 XY轴增益转换表
在已经选择的轴中将显示适当的增益转换数据。
2-2-6-1 设定项目
No.
项目
输入范围
备考
最小值
最大值
1 轴号 1 4
2 前/后 0 3 θ轴选择时进行转换。
3 Head吸嘴 Head1 Head6
4 增益区分 0 9
5 负荷惯性力矩比 0 65535
6 模型控制增益 0 65535
7 位置控制增益 0 65535
8 速度控制增益 0 65535
9 速度积分补偿 0 65535
2-26