00193928-03.pdf - 第125页
Návod k obs luze SIPLACE HF-s érie 3 Technická data Verze sof tware SR.50x.xx Vydání 01/2006 CZ 3.7 Osazovac í hlavy 125 3.7.3.1 Popis 6-ti se gmentová h lava Col lect&Plac e pracuje také podl e principu Collect&…
3 Technická data Návod k obsluze SIPLACE HF-série
3.7 Osazovací hlavy Verze software SR.50x.xx Vydání 01/2006 CZ
124
3
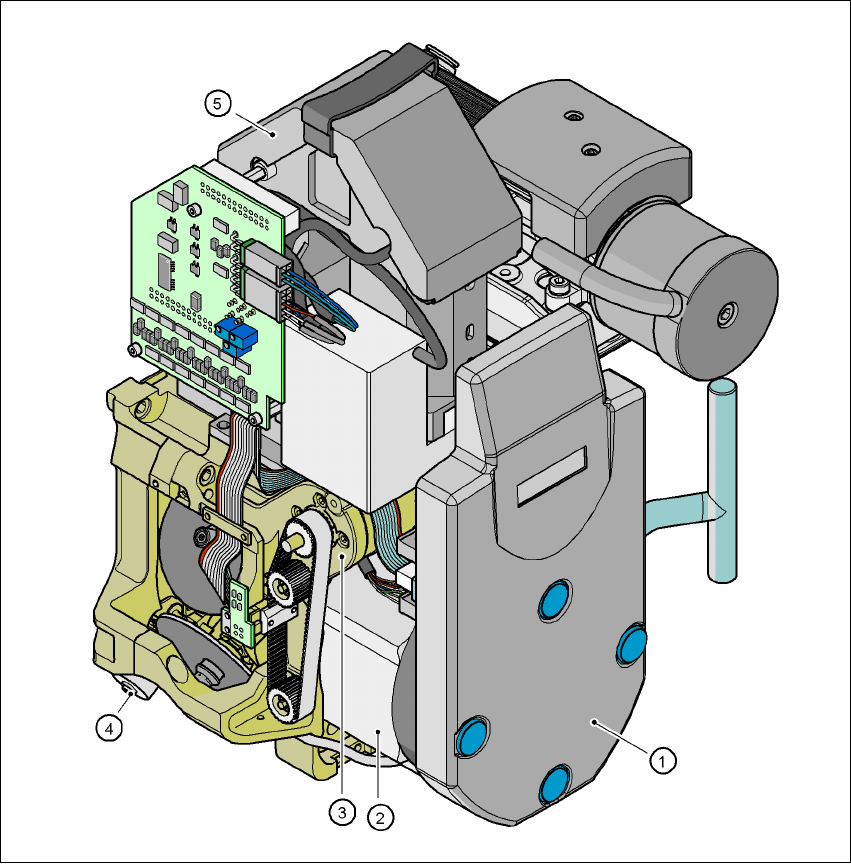
Obr. 3.7 - 7 6-ti segmentová hlava Collect&Place - funk
č
ní skupiny díl 2
3
(1) Deska rozdělovače, pod krytem
(2) Pohon hvězdy- DR-motor
(3) Motor osy Z
(4) Pohon stavění ventilu
(5) Kamera součástek 39 x 39
Návod k obsluze SIPLACE HF-série 3 Technická data
Verze software SR.50x.xx Vydání 01/2006 CZ 3.7 Osazovací hlavy
125
3.7.3.1 Popis
6-ti segmentová hlava Collect&Place pracuje také podle principu Collect&Place. S pomocí
standardního rozpoznávacího modulu součástek osazuje automat HF součástky s délkou hrany
od 32 mm nejen přesně, ale také velmi rychle. Její použití se doporučuje proto při velkém podílu
integrovaných obvodů ve vyráběných produktech. Právě v hlavní oblasti použití, pro součástky od
PLCC 44 do QFP 208, vede ke značnému nárůstu výkonu. 3
Pomocí rozpoznávacího modulu DCA může 6-ti segmentová hlava Collect&Place opticky
centrovat a osazovat součástky o velikosti 0,6 x 0,3 mm² až 13 x 13 mm². Při osazování součástek
High-Speed-Flip-Chips a Bare-Die optimalizuje rozpoznávací modul DCA rychlost a přesnost.
Hodnoty najdete v tabulce na straně 127
. 3
Kontrolní a samoučící funkce 3
Kontrolní a samoučící funkce, které jsou popsány na straně 120 pro 12-ti segmentovou hlavu
Collect&Place, se týkají i 6-ti segmentové hlavy Collect&Place. 3
3.7.3.2 Popis funkce
3
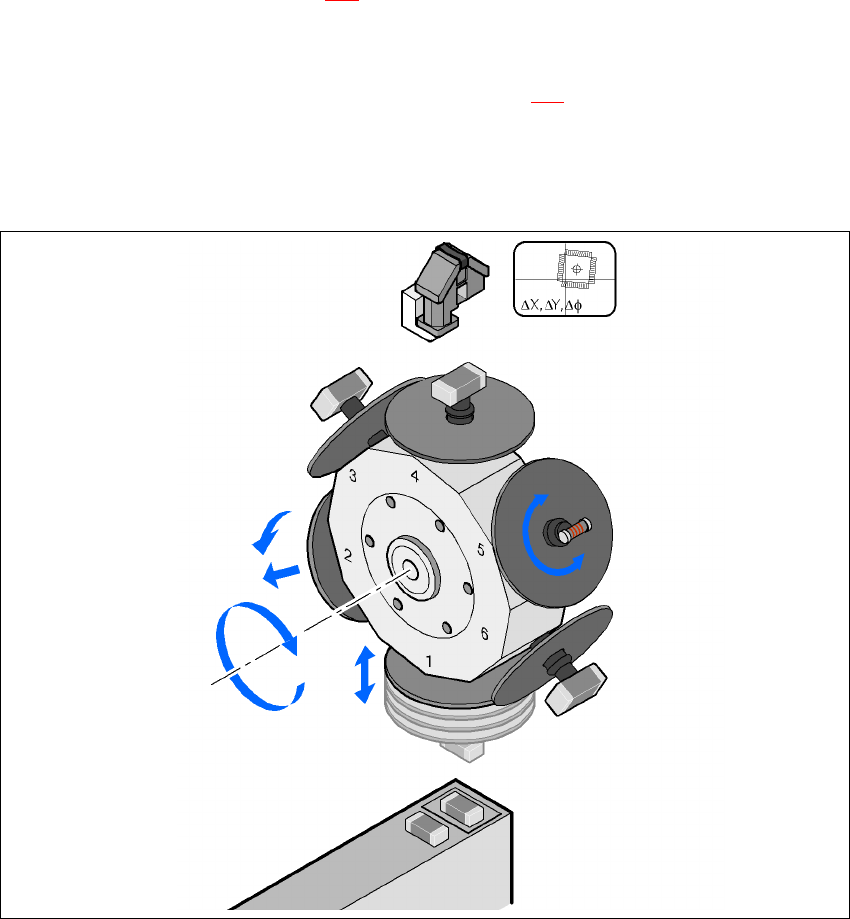
Obr. 3.7 - 8 Popis funkce
Kamera součástek
Osa DP
Součástku natočit
do osazovací polohy
Pinolu vytáhnout
nebo vložit
Osa Z
Součástku odebrat
nebo osadit
Osa hvězdy
Rotace hvězdy
Součástku odhodit
3 Technická data Návod k obsluze SIPLACE HF-série
3.7 Osazovací hlavy Verze software SR.50x.xx Vydání 01/2006 CZ
126
Æ 6-ti segmentová hlava Collect&Place má tři osy, osu DR nebo osu hvězdy, osu Z a osu DP.
Æ Hvězda rotuje se svými 6 segmenty okolo osy hvězdy. Segmenty jsou držáky pinol. Na
každé pinole je umístěna pipeta. Pipetou jsou součástky přisávány a transportovány z
odebírací/osazovací polohy (1) k odhazovací poloze (2), k poloze pro optické centrování (4)
nebo k poloze otáčení (5).
Æ Osa Z vykonává svislý pohyb. Každá pinola, která se nachází ve nejnižší poloze hvězdy (1),
je touto osou pohybována nahoru nebo dolu. Tímto pohybem se odebírají součástky z
podavačů a pokládají na desky. Osa Z je tzv. "inteligentní osa". "Všímá si" odebírací výšky
jedné každé stopy podavače a osazovací výšky pro každou součástku. Tak lze osazovací
proces urychlit. Programovaná osazovací síla zůstává konstantní.
Æ Osa DP otáčí opticky centrovanou součástkou do požadované polohy. Průběhy pohybů
rotačních a posuvných os jsou řízeny regulačními obvody. Senzory polohy a rychlosti zjišt'ují
aktuální hodnoty pohybů os a předávají je řízení os. Ze srovnání požadovaných a aktuálních
hodnot jsou zjišt'ovány parametry síly a rychlosti pro servozesilovače a tím pro prováděné
pohyby os. Hodnoty vakua na pipetách jsou během celého procesu odebírání a osazování
trvale elektronicky kontrolovány, aby byla minimalizována chybovost osazování.