3d viTrox program.pdf - 第11页
六 : 重要参数讲解
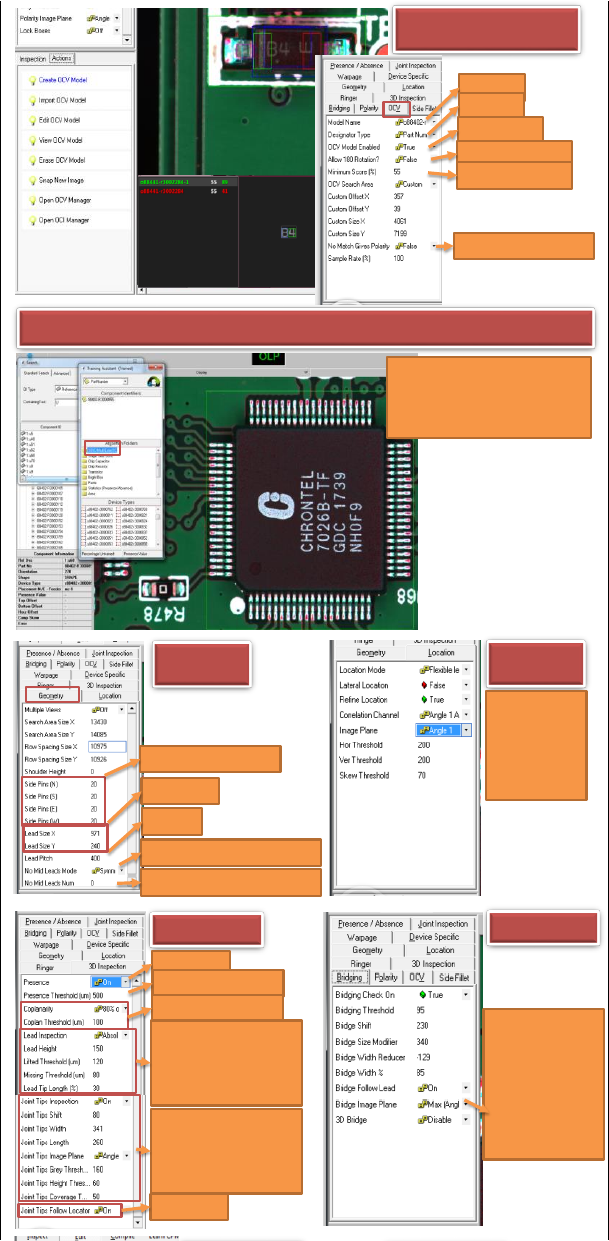
OCV 算法:检测错件,在极性不清
晰的情况下,也可用来检测极性
OCV选择
料号
OCV模式开启
是否允许180°反向
最小相似度
丝印错误,报极性不良
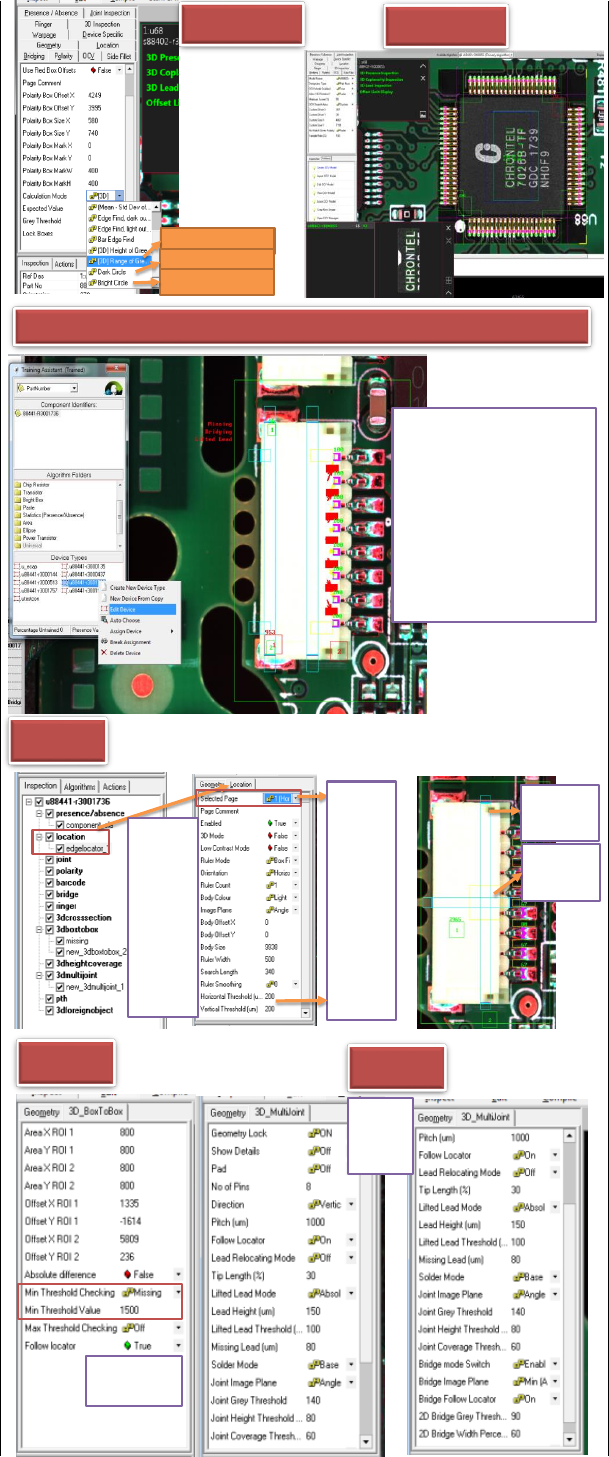
3.4、SOIC算法
第一步:使用SOIC创建新料号。
第二步:分配算法
第三步:进入编辑界面
几何外形
给定东南西北四面引脚个
引脚间
引脚长宽尺
缺引脚模式,用于不是对称引脚
缺引脚个数
Location
检测偏移,注意灯
光.
平行
垂直
角度
3D检测
本体打开
本体高度,IC类型为默认
共面性检测
翘脚检测——absolutly
引脚高度--以实际为准
翘脚---超出实际高度120um
缺角---低于实际高度80um
翘脚大小--20-30
焊点检测
注意:灯光-Angle1
灰度值-140-160
高度-50-80
覆盖范围:40-60
跟随
短路检测
焊桥模式:Enable
灯光:
跟随引脚:ON
灰阶值:90-95
穿透宽度:60-95
3D 模式——特殊情况
用
注意灯光
Mix(Angle 1\2\3\4)
Polarity 算法:检测反
向
高度差(未截图进
暗圆
亮圆
OCV 算法
与B-type一致
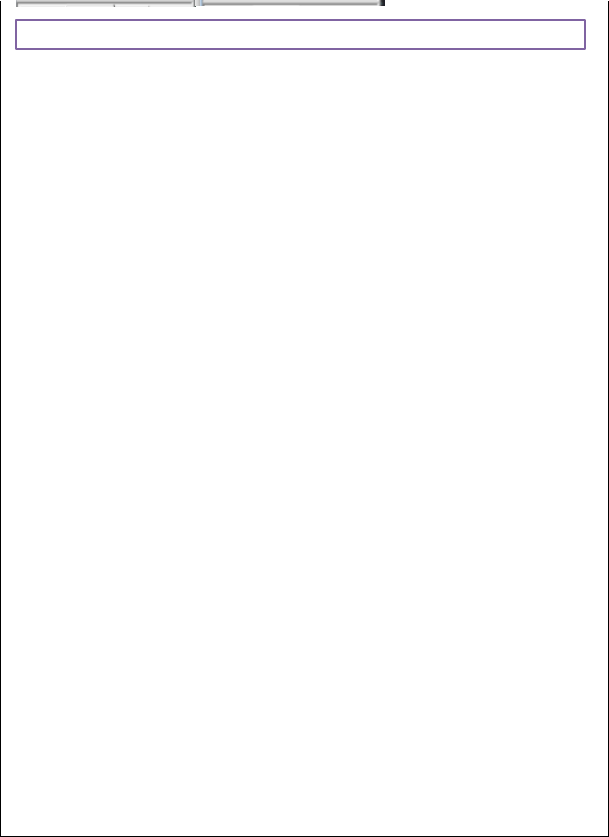
3.4、U-type算法
第一步:使用Universal创建新料号。
第二步:分配算法
第三步:进入编辑界面
Location
1、定位
2、焊点
3、极性
4、条码
5、短路
6、------
7、------
8、3D盒子对
比
9、3D高度覆
盖
10、翘脚和焊
点
1、定位条数
量
2、备注
3、开启
4、3D模式
5、-----
6、------
7、方向,H/V
8、个数
9、边缘L/D
10、灯光选择
-----
偏移值设置
1、H定位,蓝色
虚线是本体,青
色实线末端是定
位检测开始的地
2、V定位,蓝色
虚线是本体,青
色实线末端是定
位检测开始的地
3D_BOX To Box
1、可检测各类项目
2、小于设置值报不
3D_MutiJoint
检测翘脚
虚焊,与
b-type类型
一样
六 : 重要参数讲解