TM2381_僼傿僨儏乕僔儍儖慡擣幆婡擻偺岠棪壔.pdf - 第3页
ヤマハ発動機株式会社IM 事業部 マウンター技術部ソフト開発グループ MD OC-SOFT50080 3/5 3. 3. 3. 3. 機能 仕様 機能仕 様 機能仕 様 機能仕 様 3.1 3.1 3.1 3.1 フィデューシ ャルマーク フィデュ ーシャルマーク フィデュ ーシャルマーク フィデュ ーシャルマーク 認 識順序決定 認識順序決定 認識順序…
ヤマハ発動機株式会社IM 事業部
マウンター技術部ソフト開発グループ
MDOC-SOFT50080
2/5
1
11
1.
..
. 対象機種
対象機種対象機種
対象機種、
、、
、対応
対応対応
対応バージョン
バージョンバージョン
バージョン
本機能の対象機種、対応バージョンは以下の通りです。
表
表表
表 1
11
1.1
.1.1
.1 本機能
本機能本機能
本機能の
のの
の対象機種
対象機種対象機種
対象機種と
とと
と対応
対応対応
対応バージョン
バージョンバージョン
バージョン
項目名 対象 備考
対象機種名 YS シリーズマウンタ
YG12 シリーズマウンタ、YG300
対応バージョン V3.23STDR1.000 以降
2
22
2.
..
. 機能概要
機能概要機能概要
機能概要
2.1
2.12.1
2.1
機能概要
機能概要機能概要
機能概要
ポイントフィデューシャルを除くフィデューシャルマーク(基板、ブロック、ローカル)を連続で認識して
から搭載動作を行うのがフィデューシャル全認識機能です。この機能の動作シーケンスが改善され、
高速化されました。
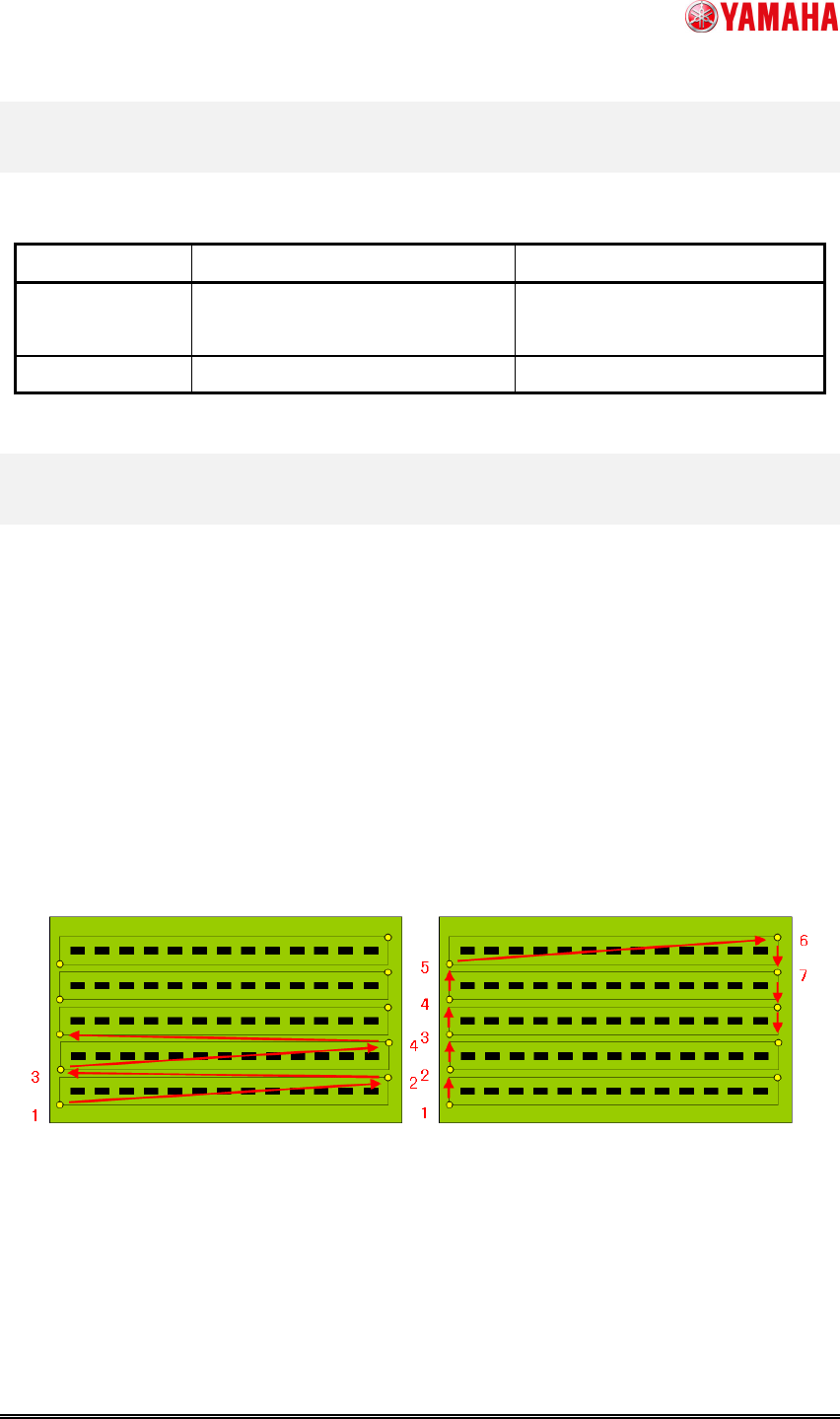
ブロック展開後のローカルフィデューシャルを認識する際に、効率よい認識順序で認識動作を実行
する機能は以前よりありました。しかしながら、従来は図
図図
図 2.1
2.12.1
2.1 左
左左
左に示すように、同一ブロック内の対とな
るフィデューシャルマークは必ず連続して認識する動作シーケンスとなっていました。
図
図図
図 2.1
2.12.1
2.1 右
右右
右に示すように、対となるフィデューシャルマークをそれぞれ別のタイミングで認識可能とする
ことで、認識タクトが大幅に短縮されました。特に多面取り基板の生産性を向上に貢献します。
図
図図
図 2.1
2.12.1
2.1
フィデューシャル
フィデューシャルフィデューシャル
フィデューシャル全認識
全認識全認識
全認識の
のの
の動作
動作動作
動作タクト
タクトタクト
タクト高速化
高速化高速化
高速化(
((
(左
左左
左:
::
:従来
従来従来
従来、
、、
、右
右右
右:
::
:改善後
改善後改善後
改善後)
))
)

ヤマハ発動機株式会社IM 事業部
マウンター技術部ソフト開発グループ
MDOC-SOFT50080
3/5
3.
3.3.
3. 機能仕様
機能仕様機能仕様
機能仕様
3.1
3.13.1
3.1
フィデューシャルマーク
フィデューシャルマークフィデューシャルマーク
フィデューシャルマーク認識順序決定
認識順序決定認識順序決定
認識順序決定
フィデューシャル全認識の実行対象となるフィデューシャルマークは以下です。ポイントフィデューシ
ャルはフィデューシャル全認識対象外です。
基板フィデューシャル
ブロックフィデューシャル
2 点ローカルフィデューシャル
4 点ローカルフィデューシャル
これらのうち、2 点ローカルフィデューシャルに限り、認識順序を自動決定することで効率よく認識動
作を行うことができます。認識順序は基板データの読み込み時に決定され、基板データ内には記録さ
れません。
2 点ローカルフィデューシャルの認識順序は、以下のように決定されます。
1 番目に認識するマークは、
マシン正面から見て最左手前のマークとする。
2 番目に認識するマークは、
1 番目に認識するマークから最もヘッドの移動時間の少ないマークとする。
…
n 番目に認識するマークは、
(n-1)番目に認識するマークから最もヘッドの移動時間の少ないマークとする。
1 ヘッドに 2 つのフィデューシャルカメラを有し、かつ、ベースマックスを使用するマシンの場合、両方
のフィデューシャルカメラをフィデューシャルマーク認識に使用することができます。この場合、それぞ
れのフィデューシャルカメラでの移動時間を推測した上で、最もヘッドの移動時間の少ないマークを次
に認識するマークとして決定します。
ヤマハ発動機株式会社IM 事業部
マウンター技術部ソフト開発グループ
MDOC-SOFT50080
4/5
3.2
3.23.2
3.2
フィデューシャル
フィデューシャルフィデューシャル
フィデューシャル全認識機能
全認識機能全認識機能
全認識機能と
とと
と部品先取
部品先取部品先取
部品先取り
りり
り機能
機能機能
機能
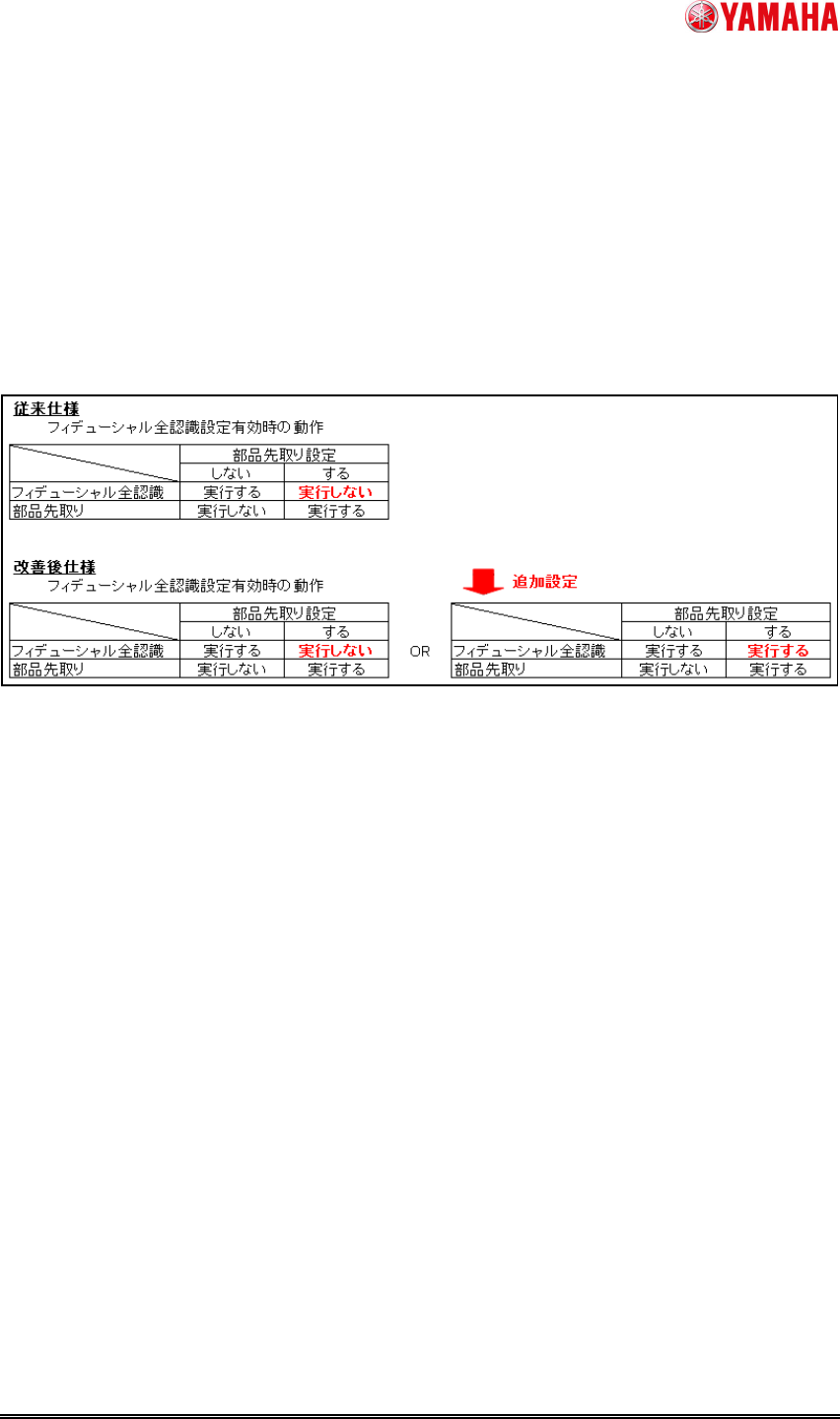
フィデューシャル全認識動作と部品先取り動作の両方を実行することが可能になりました。
図
図図
図 3.1
3.13.1
3.1 に示すように、従来は両機能がともに有効な組み合わせの場合、部品先取りのみを実行する
動作仕様となっていましたが、フィデューシャル全認識前に部品先取りを実行するかしないかを基板デ
ータの部品先取り設定で指定することが可能になりました。設定については 4.
4.4.
4. 設定方法
設定方法設定方法
設定方法 を参照くださ
い。
図
図図
図 3.1
3.13.1
3.1
フィデューシャル
フィデューシャルフィデューシャル
フィデューシャル全認識機能
全認識機能全認識機能
全認識機能と
とと
と部品先取
部品先取部品先取
部品先取り
りり
り機能
機能機能
機能
フィデューシャル全認識動作と部品先取り動作を併用する場合、フィデューシャル全認識動作中、部
品吸着状態のヘッドが基板上を動作しますので、搭載ずれや部品落下が発生する可能性があります。
従
従従
従って
ってって
って、
、、
、部品先取
部品先取部品先取
部品先取りで
りでりで
りで吸着
吸着吸着
吸着した
したした
した部品
部品部品
部品の
のの
の吸着状態
吸着状態吸着状態
吸着状態が
がが
が、
、、
、認識動作
認識動作認識動作
認識動作のための
のためののための
のためのヘッド
ヘッドヘッド
ヘッド移動中
移動中移動中
移動中に
にに
に十分安定
十分安定十分安定
十分安定してい
していしてい
してい
ることを
ることをることを
ることを確認
確認確認
確認した
したした
した上
上上
上で
でで
で併用
併用併用
併用するよう
するようするよう
するよう注意
注意注意
注意が
がが
が必要
必要必要
必要となります
となりますとなります
となります。
。。
。
部品先取りの設定は基板情報で基板データ毎に可能です。新規に基板データを作成する際、部品
先取りは「する」と設定されていますので注意してください。