G5《使用说明书》.pdf - 第5页
5 5 1.2.3 (Fid ucially mark ) Fiducial Mark Detection CCD came ra Alignment Mode came ra PCB X Y Fiducial Mark…
4
1.2
1.2.1
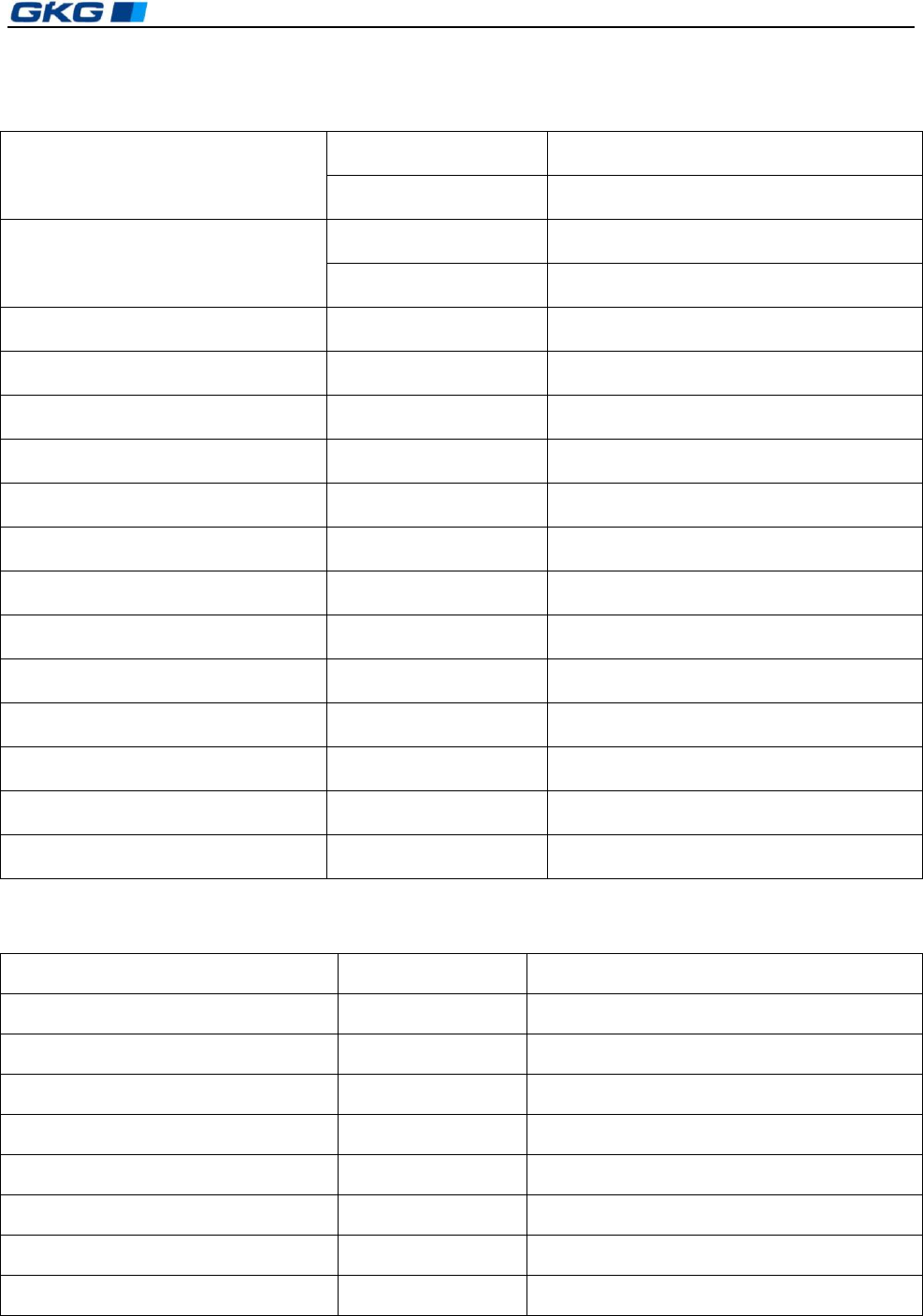
Frame Size
470500 mm
737737 mm
PCB Size
PCB
5050 mm
PCB
400310mm
PCB Thickness
PCB
0.4~6 mm
PCB Distoron
PCB
MaxPCB 1% PCB8mm
Support System
Clamp System
Table Adjustment Ranges
X:3mm; Y:7mm; :2°
Conveyor Speed
Max 1500mm/S
Conveyor Height
880940mm
Conveyor Direction
----
Squeegee Pressure
0.5~10Kgf/cm
2
Printing Speed
6~200mm/sec
Squeegee Angle
60°55°()45°
Squeegee Type
Cleaning System
1.2.2
Repeat Positioning Accuracy
0.01mm
Printing Accuracy
0.025mm
Cycle Time
8s()
Product Changeover
<5Min
Air Required
4.5~6Kgf/cm
2
Power Input
AC 220V10%,50/60HZ,2.5KW
Control Method
PC Control
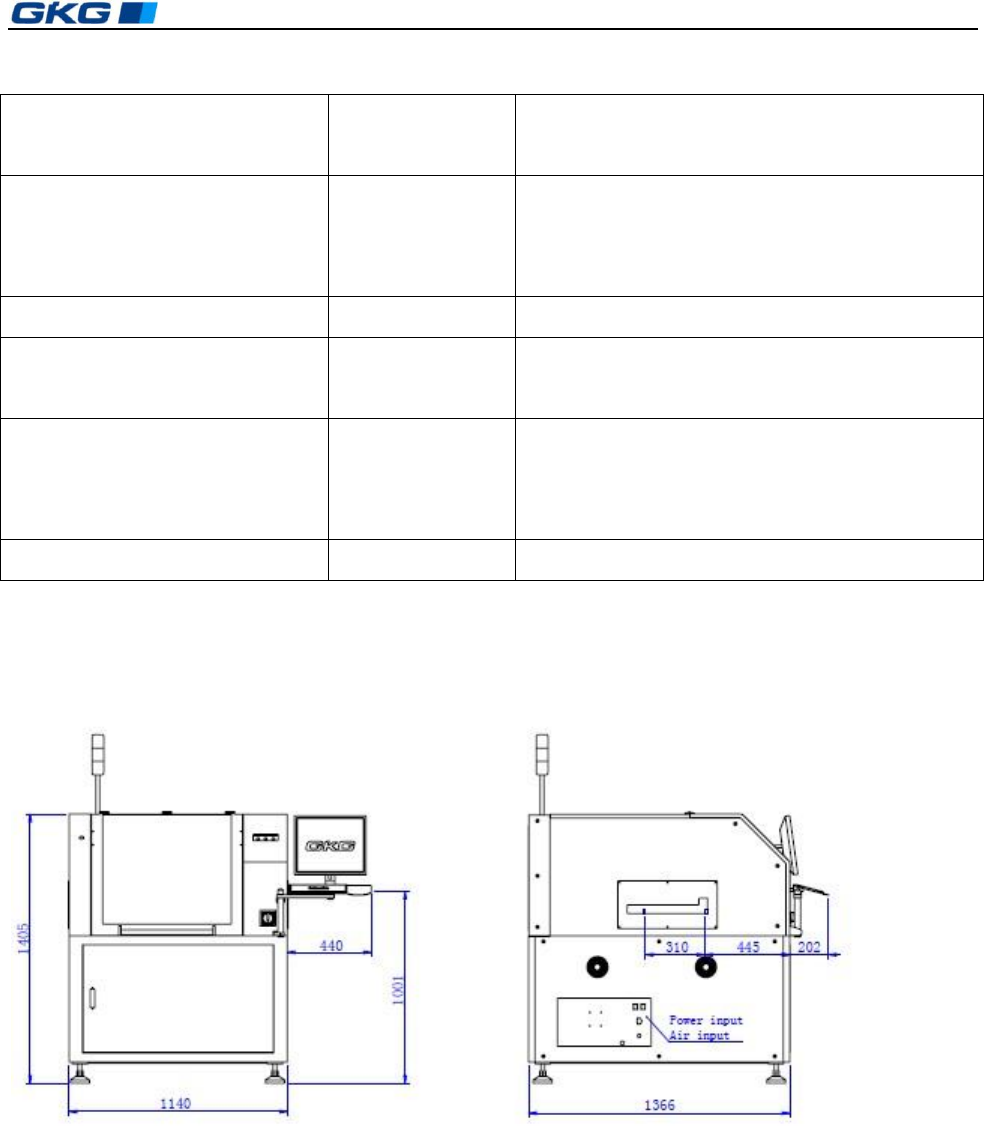
Machine Dimensions
1146(L)1364(W)1440(H)mm
Weight
1000kg
5
5
1.2.3 (Fiducially mark )
Fiducial Mark Detection
CCD camera
Alignment Mode
camera PCB
XY
Fiducial Mark Shape
Fiducial Mark Size
1mm2.5mm
10%
Fiducial Mark Type
Fiducial Mark Requair
1.3
1-1
1.4
PCB

6
1.4.1
PCB PCB
1.4.2
1.4.3 PCB
PCB
PCB
1.4.4
CCD CCDCamera
/
PCB 0.01mm
1.4.5
1.4.6