JM-100_SPE_JP.pdf - 第32页
1 1 28 3-2-8-1- 2 クリンチ 可能サイズ(基 板 Y 方向サ イズが小さい場合) Y XY 0 180 ° 0 180 X 1mm …
第 1 部 基本編 第 1 章 装置の概要
27
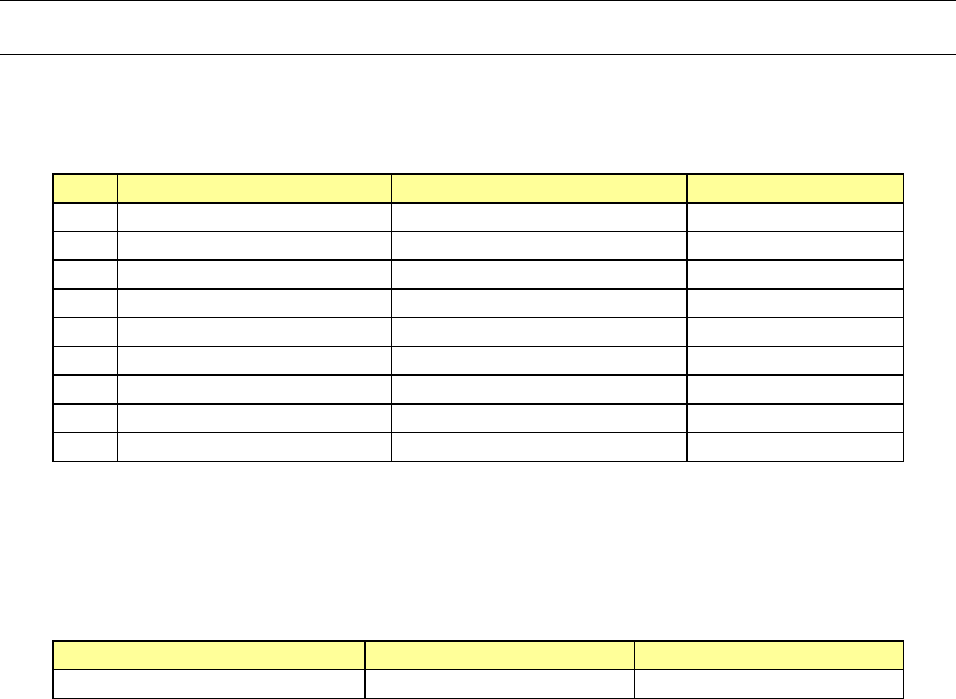
クリンチユニット
挿入されたリード部品のリード部を曲げ、基板からの部品落下を防止するユニットです。
搬送部にサポートテーブルユニットの代わりに設置されます。
クリンチユニットの主な仕様は下表をご参照ください。
項目
仕様
備考
リードピッチ
5
~
20mm
5mm
より狭いピッチでも対応可
能な場合がありますので、問合せ
下さい。
クリンチ方法
①外から内向き
②内から外向き
③左回転
④右回転
リード径
0.45
~
1mm
基板裏面スペース
10mm
以下
クリンチ可能基板サイズ
80
×
100
~
410
×
360mm
2 回クランプ時最大寸法
800
×
360mm
※クリンチ不可エリアがあります。
詳細は「3-2-8-1 クリンチ可能エリ
ア」をご参照ください。
サポートピンの代替
クリンチによる基板サポートを実施
クリンチ動作を行う搭載点では実
施できません。
3-2-8-1 クリンチ可能エリア
クリンチ動作、基板サポート動作はクリンチ可能エリアの範囲内で設定する必要があります。
クリンチ可能エリアは基板の Y 方向サイズや 3D センサの有無で変わります。
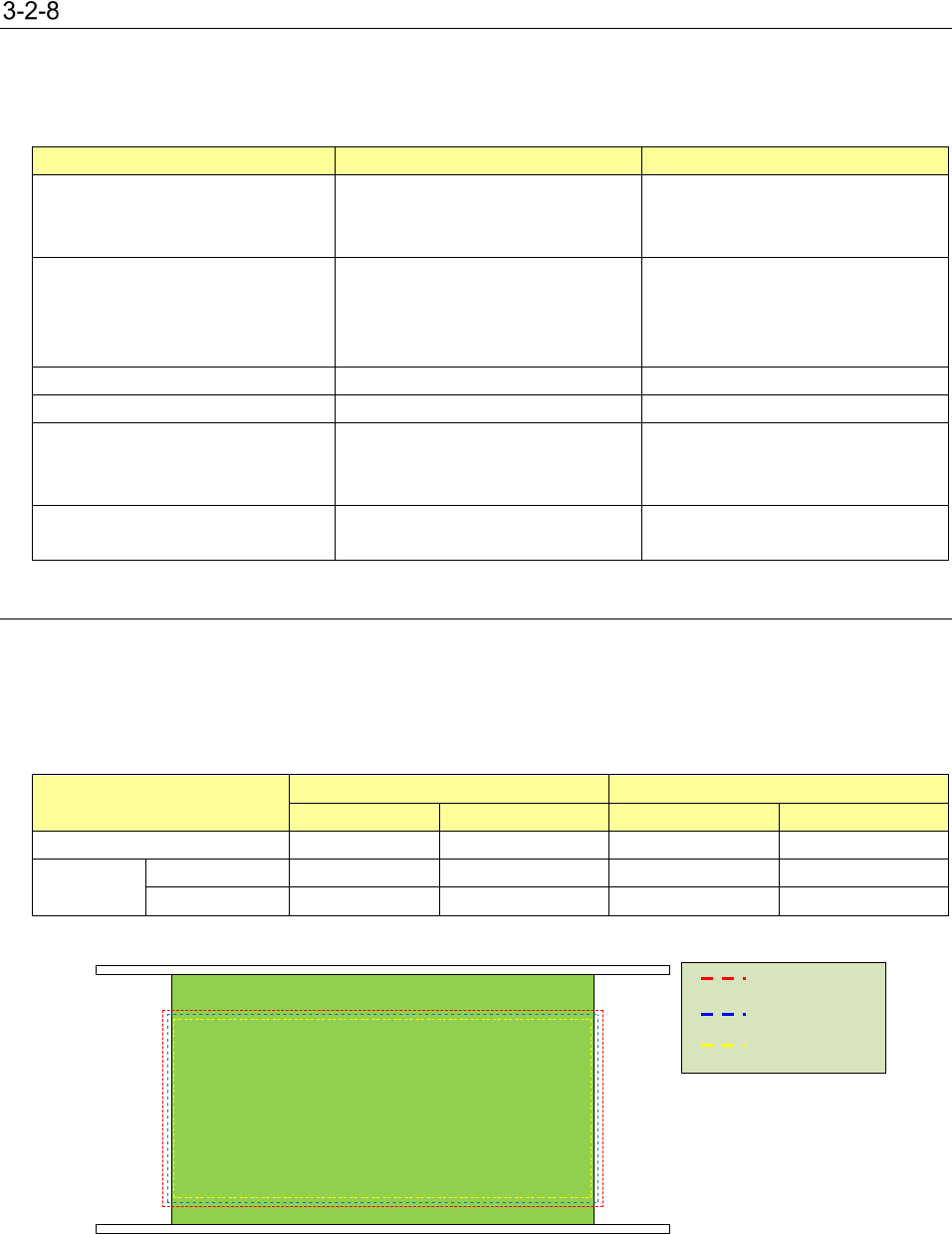
3-2-8-1-1 クリンチ可能エリア(最大基板サイズの場合)
基板サイズ 410×360mm の場合は下表の通りになります。
XY
方向
0
°/
180
°
0
°/
180
°以外
マイナス方向
プラス方向
マイナス方向
プラス方向
X
方向
1mm
以上
409mm
以下
1mm
以上
409mm
以下
Y
方向
3D
センサ無
16mm
以上
341mm
以下
29.5mm
以上
331mm
以下
3D
センサ有
16mm
以上
301mm
以下
29.5mm
以上
301mm
以下
※ 基板左下端を基準とした場合
メカリミット
ソフトリミット
クリンチ可能範囲
メカリミット
ソフトリミット
クリンチ可能範囲
1 1
28
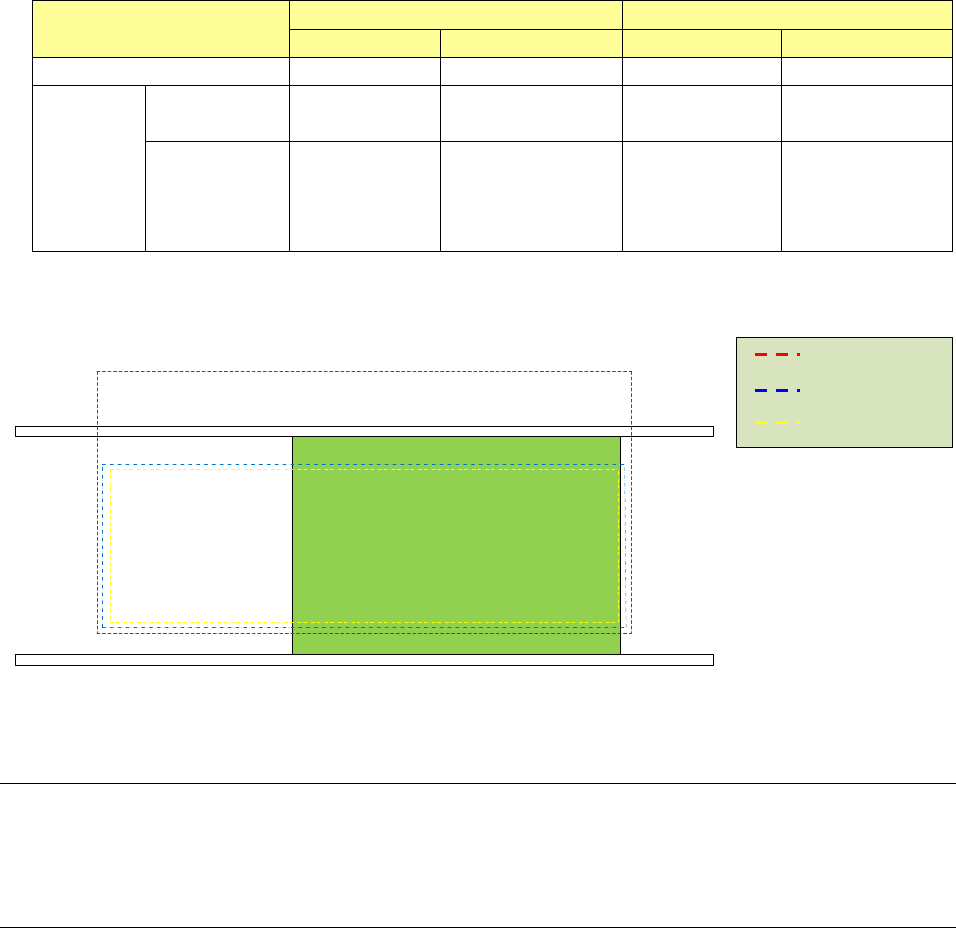
3-2-8-1-2 クリンチ可能サイズ(基板 Y 方向サイズが小さい場合)
Y
XY
0
180
°
0
180
X
1mm
409mm
1mm
409mm
Y
3D
16mm
Y
19mm
29.5mm
Y
29mm
3D
16mm
Y
19mm
301mm
29.5mm
Y
29mm
301mm
Y
メカリミット
ソフトリミット
クリンチ可能範囲
3-2-8-2
2-5
3-2-8-3
1 1
29
4
4-1
1 9
JM-100
MTS
(2)
SMT
SMT
SMT