TR7500-AOI检测原理说明.pdf - 第5页
第 5 页 共 14 页 2006-09-15 Level Check – 勾選表示 [Level Dif ference] 功能開啟。 Level difference – 系統會檢測 [Missing] 框正中央 10x10 畫素區域的灰階平均 值。舉例而言,若標準元件對於灰階值學習的結果為 100 ,而參數設定為 35 , 表示待測元件的檢測結果若大於 135 或小於 65 都會顯示為瑕疵。 Polarity Chec…
第 4 页 共 14 页 2006-09-15
二、各類檢測框說明:
A 具定位功能框:
1. Missing
Missing 的影像比對方法使用幾何學特徵比對(方法一),具有以下判別能力:
影像分數、偏移距離量測、歪斜角度量測、極性判別以及中心灰階偏差判別。
影像擷取:
◎由於程式會先由標準影像中抽出特徵才做比較,以 CHIP 類零件為例,建議在周邊
保留 2 pixel 左右邊界,可使抽出的特徵較為顯著,檢測較為穩定。
◎每個 Missing 除原本標準影像外,可增加代料影像,代料影像的數目並無特別限制。
◎當 Missing 具有數個代料影像的時候,程式會先取用第一個測試結果為 PASS 的影
像分數為測試結果。
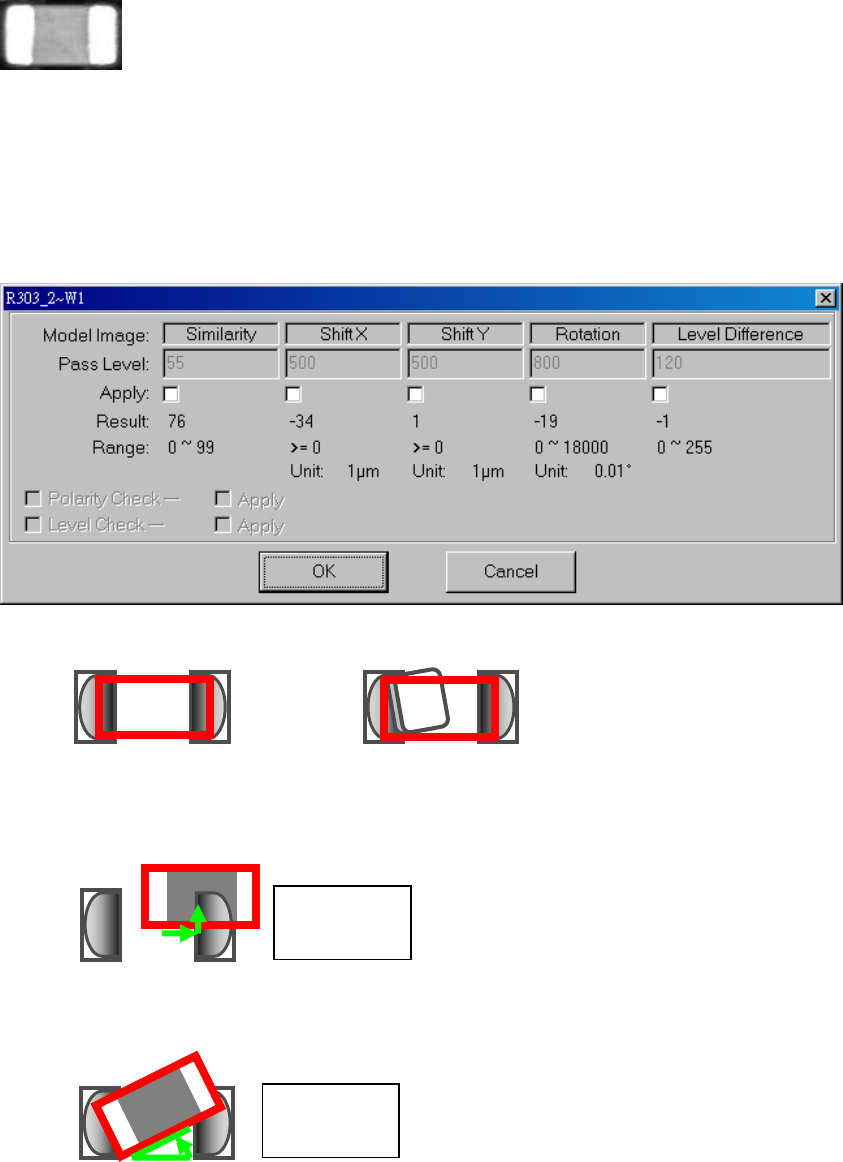
參數設定:
Similarity – 待測影像與標準影像之相似度標準。
缺件、立碑與較為嚴重的損件可由此參數的測試結果檢出。
缺件 立碑
Shift X – 待測元件之 X 方向位移的容許程度。
Shift Y – 待測元件之 Y 方向位移的容許程度。
Rotation – 待件元件之旋轉角度的容許程度。
位移
歪斜
第 5 页 共 14 页 2006-09-15
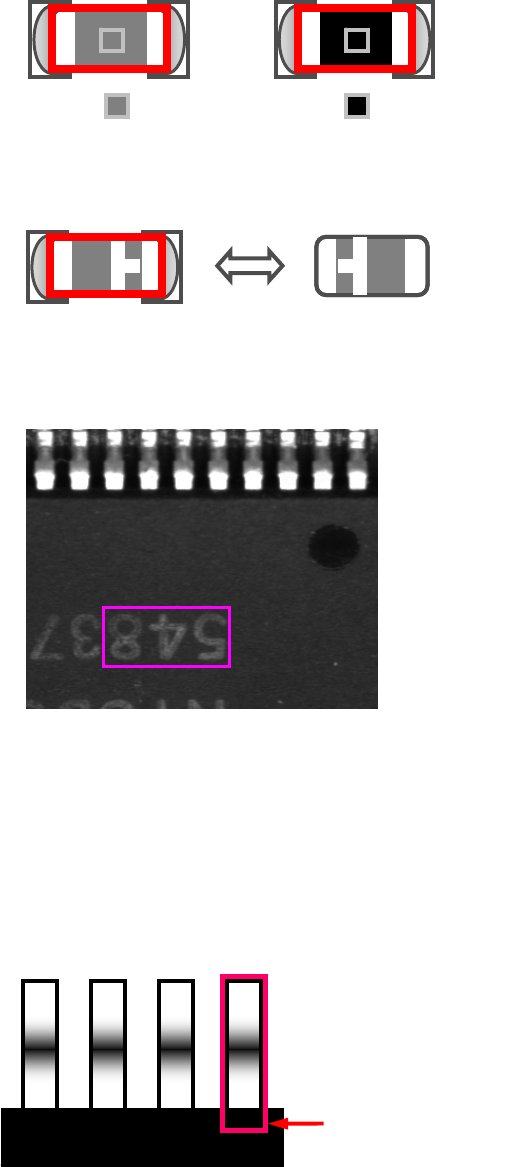
Level Check – 勾選表示[Level Difference]功能開啟。
Level difference – 系統會檢測[Missing]框正中央 10x10 畫素區域的灰階平均
值。舉例而言,若標準元件對於灰階值學習的結果為 100,而參數設定為 35,
表示待測元件的檢測結果若大於 135 或小於 65 都會顯示為瑕疵。
Polarity Check – 勾選表示若元件旋轉 180 度會判定為缺陷。
Missing 亦可放在 IC 的文字上檢測 IC 的極反與錯件。文字大約取用 3~4 個字
數較為合適,另由於文字的位置並非檢測的重點,故建議將 X、Y 偏移量的門檻值
放寬(減少文字偏移的誤判),且將相似度設嚴可有較佳的檢測結果。
* Missing 在設定為 Polarity 之前,對於 0°與 180°視為相同的元件。
2、Lead
Lead 的影像比對方法使用標準化相關性比對(方法二),其具有以下判別能力:
影像分數、偏移距離量測、同排相鄰 Lead 的相對位置差量測。
影像擷取:
用 Lead 檢測 IC 時,擷取 IC 類 Pin 腳的影像若包含一部份本體(黑色區),且周
圍也留一黑邊,會使檢測效果較為穩定。
100
10 < 65
不良
標準
本體黑色區
第 6 页 共 14 页 2006-09-15
0
1
2
3
4
◎ 帶有和 Lead Void Link 的 Lead,在 Relocate 成功時會連同 Lead Void 一起 Train.
◎ 某些種類的 IC 腳較短,往往在前端發亮帶在爐後有時發生變黑的情形,此時會造
成 Lead 分數不足而連帶 Lead Void 維持在 Untrain 的狀態,此類 IC Lead 需要加入
代料影像。
◎ 有時文字尺寸過小的影像,使用 Missing 不易解析出輪廓特徵,此時可試以 Lead
代替 Missing 檢查文字。
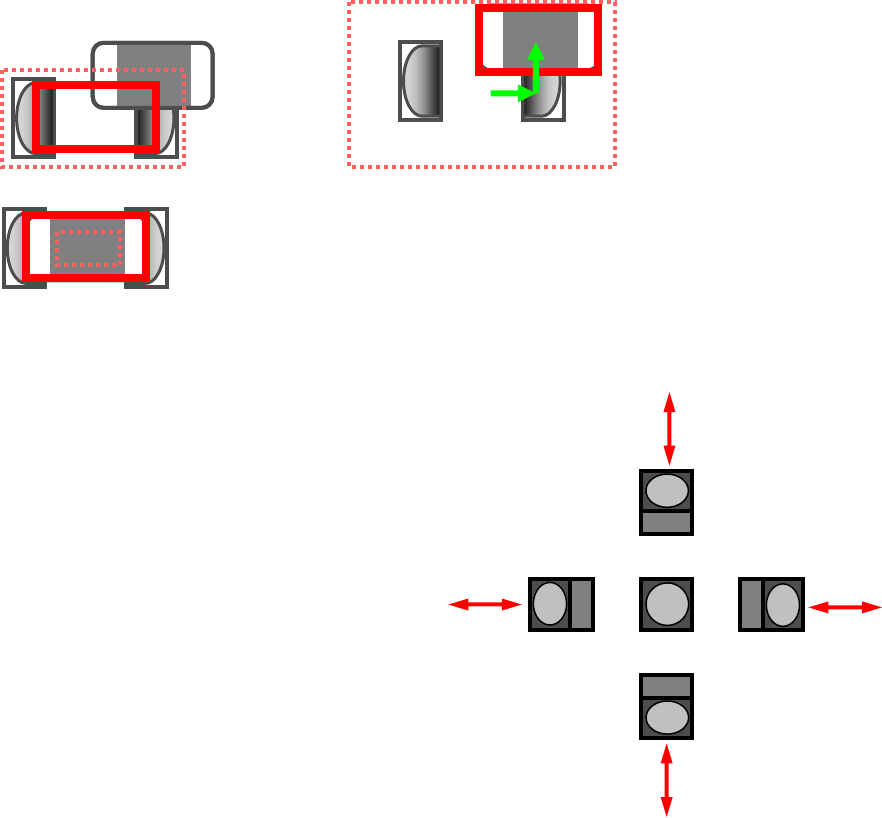
3. 關於搜尋範圍 Search Range
Missing、Lead、Alignment、Warp 這一類具有定位能力的檢測框可以設定搜尋範圍,
在搜尋範圍內的影像才可以被比對與尋找,由於 Search Range 設定的情況不同,檢測結
果也會有些差異。(虛線部分為搜尋範圍)
1. 以 Missing 與 Lead 來說,元件偏離了容許範圍,在搜尋範圍內的被找到會判偏移,
在搜尋範圍外由於並沒有找到所以判缺件。
缺件 加大搜尋範圍後判為偏移
2. 搜尋範圍過小時會造成檢測框搜尋上的錯誤,造成誤判,請重新設定適當的大小。
搜尋範圍過小
3. 在 Angle Camera 由於板彎存在時容易造成待測影像偏離搜尋範圍,故需要把某些
方向的搜尋範圍加大,原則如下:
※ 1、2 號 Camera:
Y 方向板彎偏移大→
Y 方向搜尋範圍、Y 方向偏移容許值放大
※ 3、4 號 Camera:
X 方向板彎偏移大→
X 方向搜尋範圍、X 方向偏移容許值放大
4. 搜尋範圍可先在 AT PG 的 Tune>Library
中設定,亦可在 Train Dialog 中設定。