3d viTrox program.pdf - 第6页
检测算法 设置 : Geometry: (定位范 围) 1 、定义电阻的自动搜索范围、本体以及 焊盘检测窗口的大小。 2 、可以再参数栏输入,也可以 收到拖 Location: (检测偏移) 1 、进入 3D 模式,测量平移和垂直距离。 2 、平移和垂直参数给定全距离的一半 (二级标准) 3 、参考: 1 、打开 3D 模式, Enable 2 、关闭 2D 模式, Disable 3 、 3D 定位, 3D Only 4 、本体元件高…
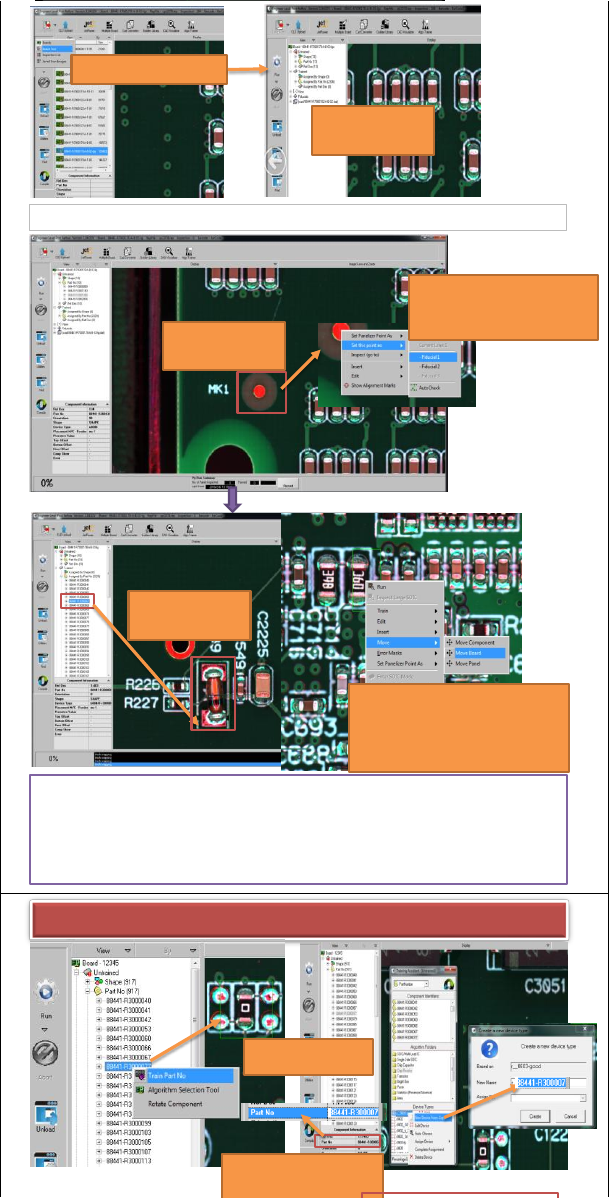
Board tree
库可以重复导入,在不断
开链接的状态下。
1、go to Fiducial,找到
Fiducia1,在中心点点击
鼠标右键
2
、设置
Mark
点和移动元件
2、set this point as :Fiducia1
设置OK后,运行一下Mark点,快捷键:
Ctrl+A
OK情况:元件框与元件
位置一致。
NG情况:元件框与元件位置不一致。
出现这种情况,点击一个元件,右键选择
Move:
1、单一元件:Move Compenent,只移动单独元
件。
2、单板元件:Move Board,移动单板 。
3、制作程序
3.1、chip Resisitor算法——对象:chip电阻、chip电感···等chip类的元件
3.2、chip Capcitor算法——对象: chip电容
3.3、Bright Box算法——对象:二极管、三极管、柱形电容、钽电容、晶振等有引脚的不规则元件
3.4、SOIC/ Multi-lead IC算法——对象:SOP、QFP、QFN、PLCC等IC元件
3.5、U-Type算法——对象:各类不规则元件、超高元件、无法定位精准元件
3.1、chip Resisitor算法
训练元件——创建新料
分配到料号——编辑元件
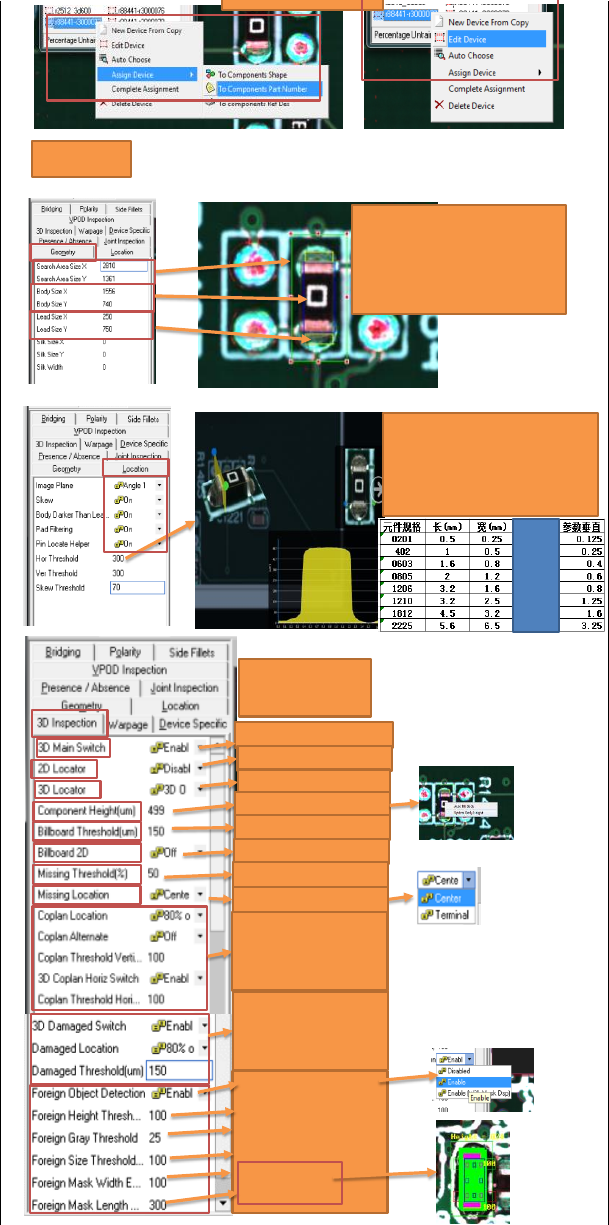
检测算法设置:
Geometry:
(定位范
围)
1、定义电阻的自动搜索范围、本体以及
焊盘检测窗口的大小。
2、可以再参数栏输入,也可以收到拖
Location:
(检测偏移)
1、进入3D模式,测量平移和垂直距离。
2、平移和垂直参数给定全距离的一半
(二级标准)
3、参考:
1、打开3D模式,Enable
2、关闭2D模式,Disable
3、3D定位,3D Only
4、本体元件高度,可自动更
5、3D检测侧件,参数150um
5、2D检测侧件,Off
6、检测少件,≥本体高度
7、缺件定位,中心定位
8、共面性检测,平行和垂直
共面性,阀值=100um,特殊
情况,如本体表面本身是凹
凸不平的,不作检测。
9、损件检测,阀值
=150um,特殊情况,如本体
表面本身是凹凸不平的,不
作检测。
10、多件检测,(同时可检
测短路)
10.1、检测多件物体高度
10.2、检测多件物体灰阶值
10.3、检测多件物体尺寸
10.4、忽略宽度范围
10.4、忽略长度范围
3D
检测
平移
参数
根据
实际
情况
设置
焊点检测
1、焊锡检测模式,打
2、3D模式,选择
3、焊锡窗口尺寸和偏移
4、焊锡高度阀值(以本体高度为
5、焊锡灰阶(140-160)
6、符合条件的焊锡覆盖面积(40-
7、灯光 Angle1(重点,不能选错)
8、检测窗口跟随焊盘
1、创建OCV
2、导入OCV
3、编辑OCV
4、OCV视图模式
5、删除OCV
chip料无极性允许180°反
向
OCV图示效果
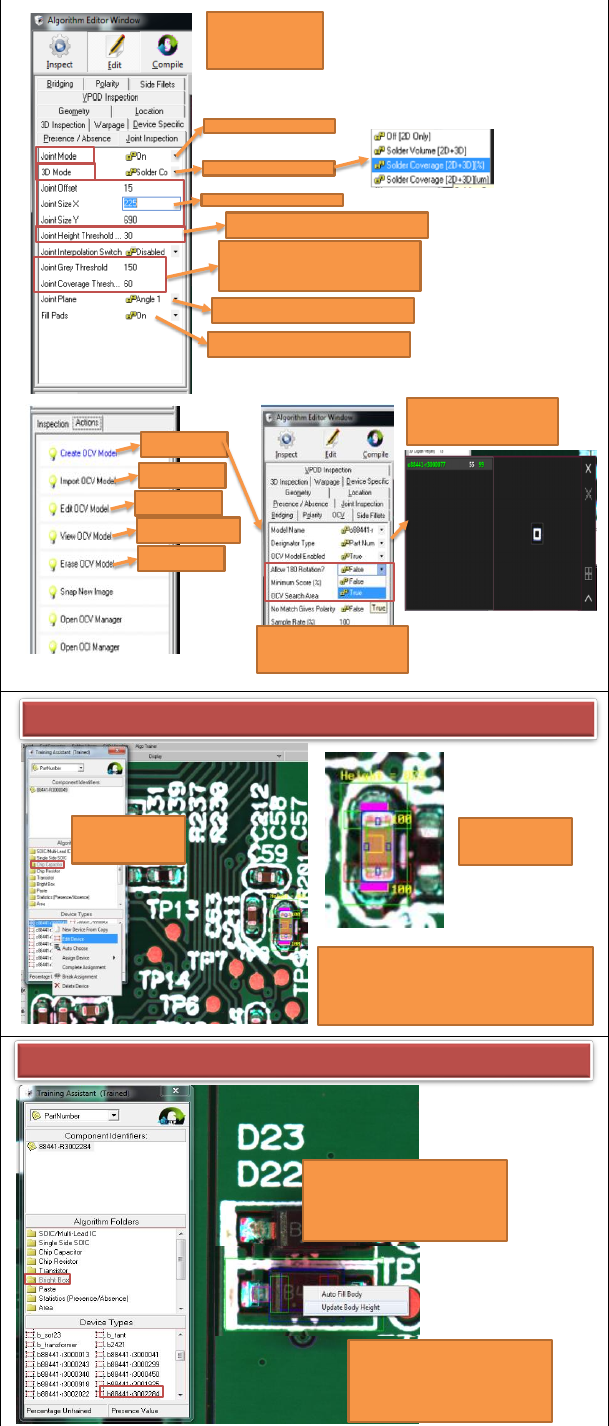
3.2、chip Capcitor算法
使用chip电容算法
chip电容算法设置和chip电阻的基本一致,所不同的
是:
1、chip电容不需要OCV
检测效果
3.3、Bright Box算法
第一步:使用B-type创建料号。
第二步:分配算法
第三步:进入编辑界面
几何外形与chip基本一致,不同的是:
1、设置引脚窗口长宽(与实物一致)
2、焊锡检测窗口在引脚与焊锡连接
处,长度90%。