Maintenance Reference-Chinese(SM320).pdf - 第119页
控制单元检验 Pin ON. Signal Description Pin ON. Signal Descr iption 39 M2_Vsync_TTL 40 GND 41 M2_Hsync_TTL 42 GND 43 M2_T rig_TTL 44 GND J1~6 HPC143310 – Fly Camera I mage Signal Pin ON. Signal Description Pin ON. Signal Des…
Samsung Component Placer SM320 Maintenance Reference
CON2 (HIROSE DB-15P/FR-100) – Fix Camera #1,2 Part
Pin ON. Signal Description Pin ON. Signal Description
1 GND 2 +12VDC
3 GND 4 M1_VID2_IN1
5 GND 6 M1_Hsync_2
7 GND 8 N.C
9 GND 10 +12VDC
11 GND 12 M1_VID2_IN2
13 GND 14 M1_Vsync_2
15 GND
CON3 (HIROSE DB-15P/MR-100) – Fly Camera Power Part
Pin ON. Signal Description Pin ON. Signal Description
1 M1_VSync+ 2 M1_VSync-
3 M1_HSync+ 4 M1_HSync-
5 N.C 6 M2_VSync+
7 M2_VSync- 8 M2_HSync+
9 M2_HSync- 10 N.C
11 +12VDC 12 +12VDC
13 N.C 14 GND
15 GND
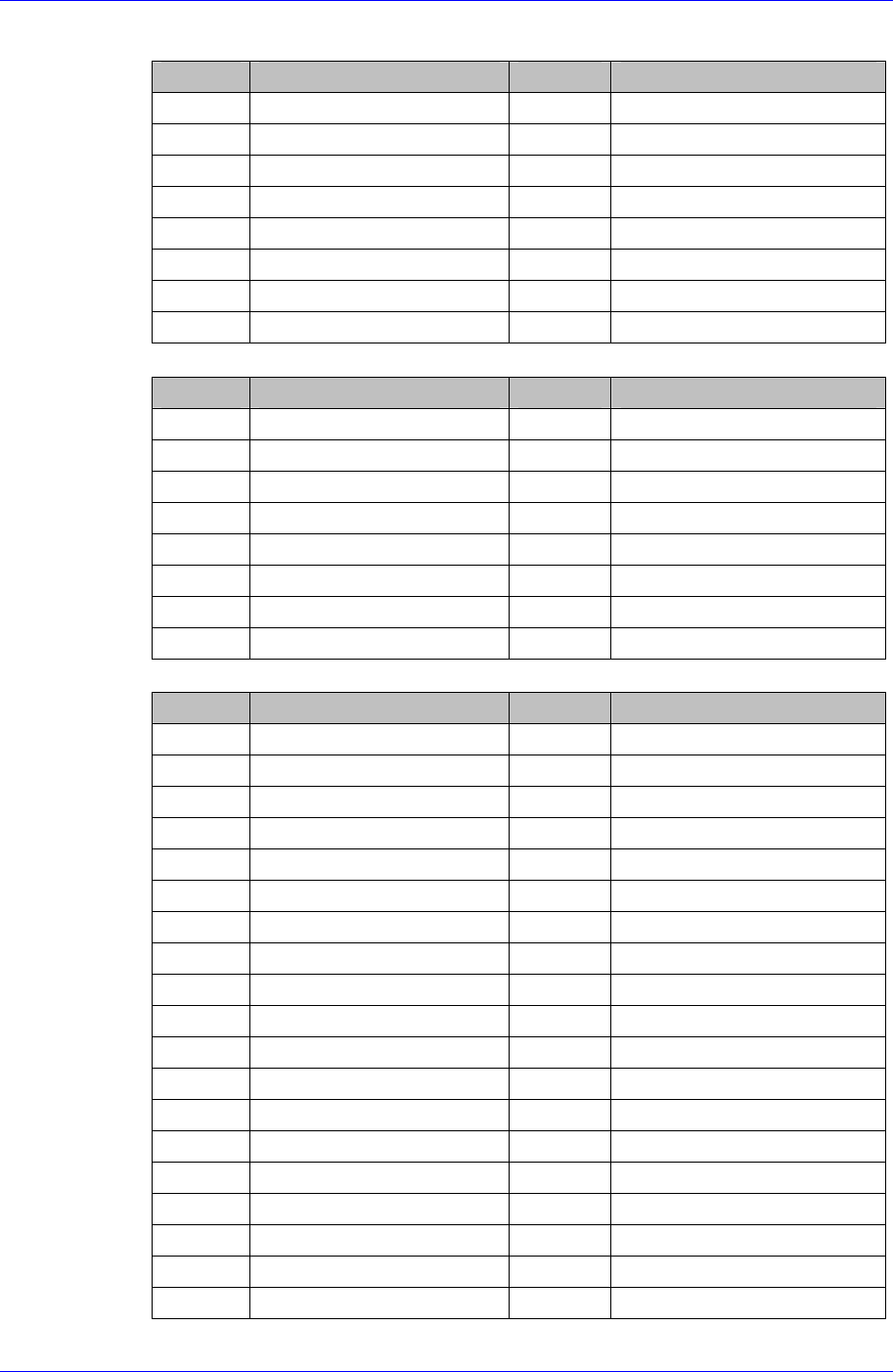
CN4( HIROSE DB-44P/MR) – Vision Grabber Part
Pin ON. Signal Description Pin ON. Signal Description
1 M1_VID1_IN1 2 M1_VID1_IN2
3 M1_VID1_IN3 4 M1_VID2_IN1
5 M1_VID2_IN2 6 M1_VID2_IN3
7 N.C 8 N.C
9 N.C 10 M2_VID1_IN1
11 M2_VID1_IN2 12 M2_VID1_IN3
13 M2_VID2_IN1 14 M2_VID2_IN2
15 M2_VID2_IN3 16 GND
17 GND 18 GND
19 GND 20 GND
21 GND 22 N.C
23 N.C 24 N.C
25 GND 26 GND
27 GND 28 GND
29 GND 30 GND
31 M1_Vsync_TTL 32 GND
33 M1_Hsync_TTL 34 GND
35 M1_Trig_TTL 36 GND
37 N.C 38 N.C
7-24
控制单元检验
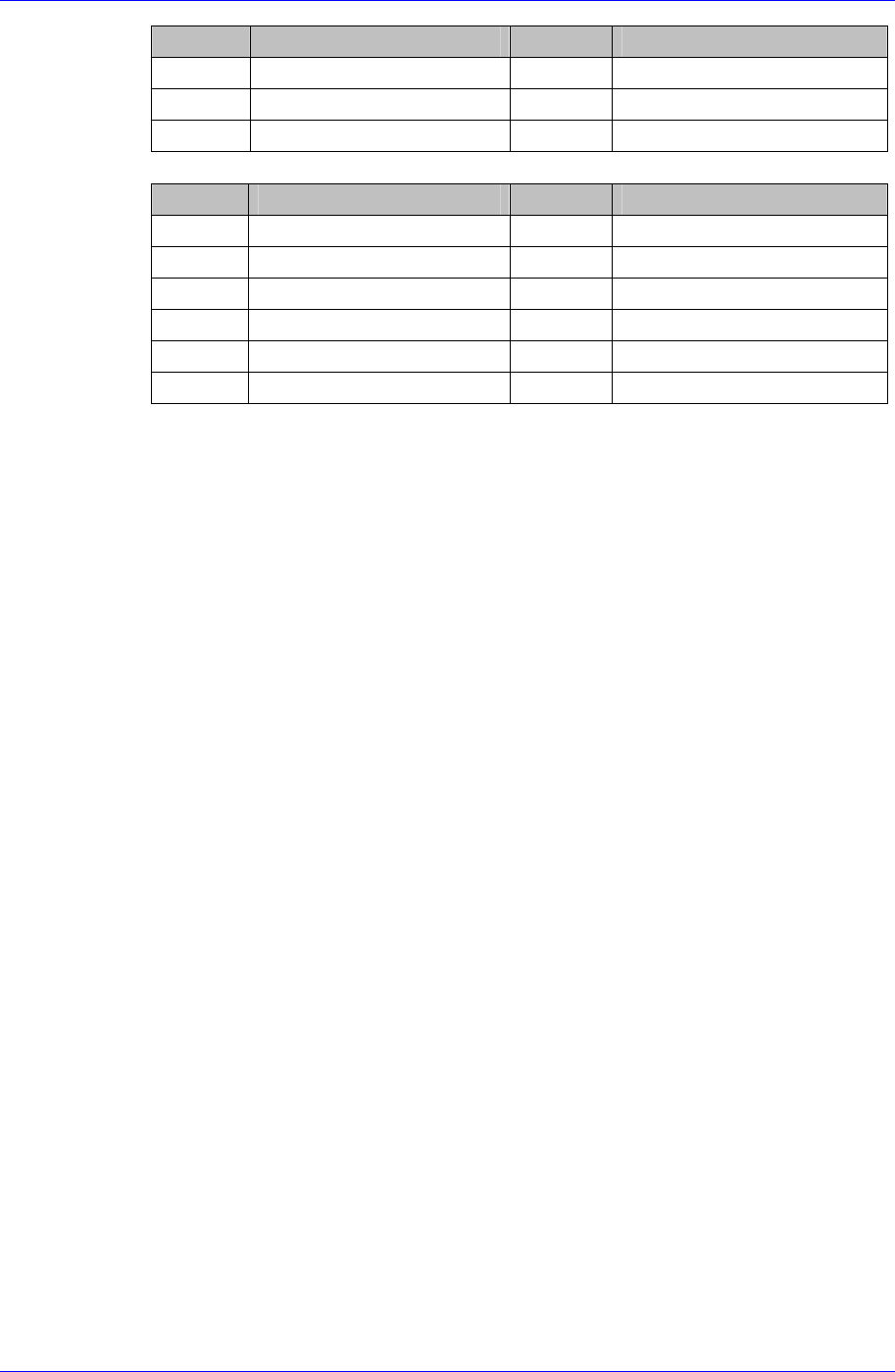
Pin ON. Signal Description Pin ON. Signal Description
39 M2_Vsync_TTL 40 GND
41 M2_Hsync_TTL 42 GND
43 M2_Trig_TTL 44 GND
J1~6 HPC143310 – Fly Camera Image Signal
Pin ON. Signal Description Pin ON. Signal Description
J1 M1_VID1_IN1 J1 GND
J2 M1_VID1_IN2 J2 GND
J3 M1_VID1_IN3 J3 GND
J4 M2_VID1_IN1 J4 GND
J5 M2_VID1_IN1 J5 GND
J6 M2_VID1_IN1 J6 GND
7-25

Samsung Component Placer SM320 Maintenance Reference
7.4. 马达部分的检点
检查以下的项目。
7.4.1. X轴
确认马达 drive 的电源无异常。 LED Display 窗初始显示‘r 0’。 (表示目前马
达的 RPM 为 0)
确认轴 Board 的 Commond Connector 的连接是否完整。确认段子有没有弯曲而
引起接触不良。
确认 Encoder 线和电源线的连接状态以及段子的接触不良。
当设备处于 READY-OFF 状态时,手动移动 head 并检查 LED Display 中马
达 RPM 的变化。
这时手动改变移动方向并检查 LED Display 中显示的 RPM 符号是否有变动。
7.4.2. Y轴
检查马达 drive 是否正常。LED Display 窗中初始显示为‘r 0’。(表示目前马达
的 RPM 为 0)
确认轴 Board 的 Commond Connector 的连接是否完整。确认段子有没有弯曲而
引起接触不良。
确认 Encoder 线和电源线的连接状态以及段子的接触不良。
在设备 READY-OFF 状态时手动移动 X Frame 并检查 LED Display 窗中马达
RPM 的变化。
这时手动改变移动方向并检查 LED Display 中显示的 RPM 符号是否有变动
7.4.3. Z1~Z6, S, W轴
检查马达 drive 是否正常。LED Display 窗中初始显示为‘r 0’。(表示目前马达
的 RPM 为 0)
确认轴 Board 的 Commond Connector 的连接是否完整。确认段子有没有弯曲而
引起接触不良。
确认 Encoder 线和电源线的连接状态以及段子的接触不良。
在设备 READY-OFF 状态时手动移动相应的轴并检查 LED Display 窗中马达
RPM 的变化。
这时手动改变移动方向并检查 LED Display 中显示的 RPM 符号是否有变动
7.4.4. R1/2, R3/4, R5/6 轴 (THETA1, THETA2, THETA3)
确认马达驱动器的电源有没有异常状况。
确认轴 Board 的 Commond Connector 的连接是否完整。Commond 信号与 STEP
I/F BOARD CN2, CN5, CN8 连接。确认 Connector 段子的接触不良。
确认 STEP I/F BOARD 上 CN3, CN6, CN9 的 R1/2(THETA1), R3/4(THETA2),
R5/6(THETA3)驱动器的连接状态。确认 Connector 段子的接触不良。
7-26