Maintenance Reference-Chinese(SM320).pdf - 第120页
Samsung Component Placer SM320 Maintenance Refer ence 7.4. 马达部分的检点 检查以下的项目。 7.4.1. X 轴 确认马达 drive 的电源无异常。 LED Display 窗初始显示 ‘r 0’ 。 ( 表示目前马 达的 RPM 为 0) 确认轴 Board 的 Commond Connector 的连接是否完整。 确认段子有没有弯曲而 引起接触不良。 确认 E…
控制单元检验
Pin ON. Signal Description Pin ON. Signal Description
39 M2_Vsync_TTL 40 GND
41 M2_Hsync_TTL 42 GND
43 M2_Trig_TTL 44 GND
J1~6 HPC143310 – Fly Camera Image Signal
Pin ON. Signal Description Pin ON. Signal Description
J1 M1_VID1_IN1 J1 GND
J2 M1_VID1_IN2 J2 GND
J3 M1_VID1_IN3 J3 GND
J4 M2_VID1_IN1 J4 GND
J5 M2_VID1_IN1 J5 GND
J6 M2_VID1_IN1 J6 GND
7-25

Samsung Component Placer SM320 Maintenance Reference
7.4. 马达部分的检点
检查以下的项目。
7.4.1. X轴
确认马达 drive 的电源无异常。 LED Display 窗初始显示‘r 0’。 (表示目前马
达的 RPM 为 0)
确认轴 Board 的 Commond Connector 的连接是否完整。确认段子有没有弯曲而
引起接触不良。
确认 Encoder 线和电源线的连接状态以及段子的接触不良。
当设备处于 READY-OFF 状态时,手动移动 head 并检查 LED Display 中马
达 RPM 的变化。
这时手动改变移动方向并检查 LED Display 中显示的 RPM 符号是否有变动。
7.4.2. Y轴
检查马达 drive 是否正常。LED Display 窗中初始显示为‘r 0’。(表示目前马达
的 RPM 为 0)
确认轴 Board 的 Commond Connector 的连接是否完整。确认段子有没有弯曲而
引起接触不良。
确认 Encoder 线和电源线的连接状态以及段子的接触不良。
在设备 READY-OFF 状态时手动移动 X Frame 并检查 LED Display 窗中马达
RPM 的变化。
这时手动改变移动方向并检查 LED Display 中显示的 RPM 符号是否有变动
7.4.3. Z1~Z6, S, W轴
检查马达 drive 是否正常。LED Display 窗中初始显示为‘r 0’。(表示目前马达
的 RPM 为 0)
确认轴 Board 的 Commond Connector 的连接是否完整。确认段子有没有弯曲而
引起接触不良。
确认 Encoder 线和电源线的连接状态以及段子的接触不良。
在设备 READY-OFF 状态时手动移动相应的轴并检查 LED Display 窗中马达
RPM 的变化。
这时手动改变移动方向并检查 LED Display 中显示的 RPM 符号是否有变动
7.4.4. R1/2, R3/4, R5/6 轴 (THETA1, THETA2, THETA3)
确认马达驱动器的电源有没有异常状况。
确认轴 Board 的 Commond Connector 的连接是否完整。Commond 信号与 STEP
I/F BOARD CN2, CN5, CN8 连接。确认 Connector 段子的接触不良。
确认 STEP I/F BOARD 上 CN3, CN6, CN9 的 R1/2(THETA1), R3/4(THETA2),
R5/6(THETA3)驱动器的连接状态。确认 Connector 段子的接触不良。
7-26
控制单元检验
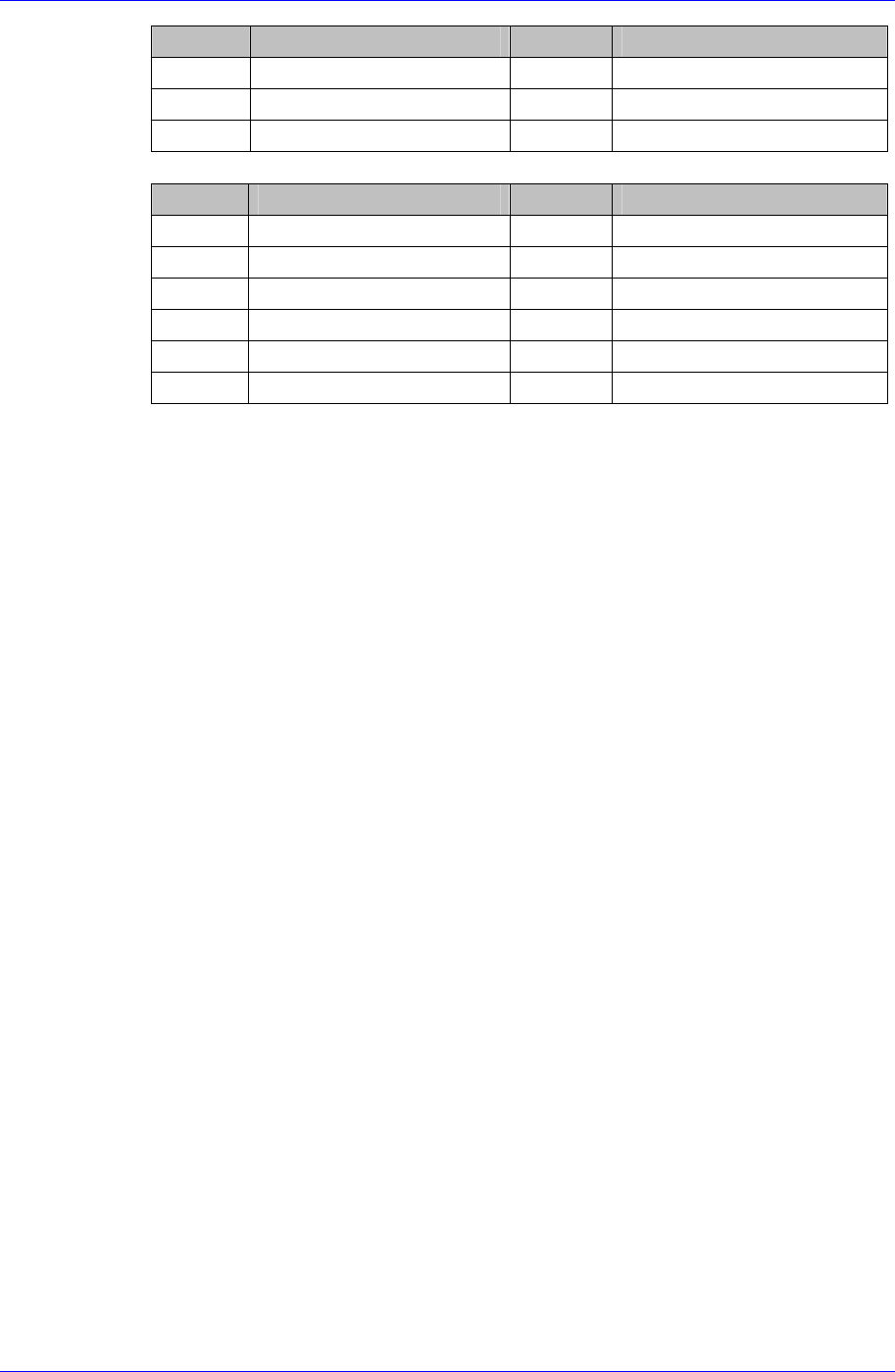
7.5. Board Jumper Setting
J12 : 8 EPROMs = 4MB
21
15 16
J12
Configuration 3 : 512K
×
8EPROMs
J11 : EPROM booting
GPIO0
GPIO1
GPIO2
GPIO3
GPIO4
GPIO5
GPIO6
GPIO7
21
7
15 16
8
J11 User Code Installed
User-Defiinable
User-Defiinable
User-Defiinable
In=Flash; Out=EPROM
User-Defiinable
User-Defiinable
User-Defiinable
User-Defiinable
EPROMs Selected (Factory configuration)
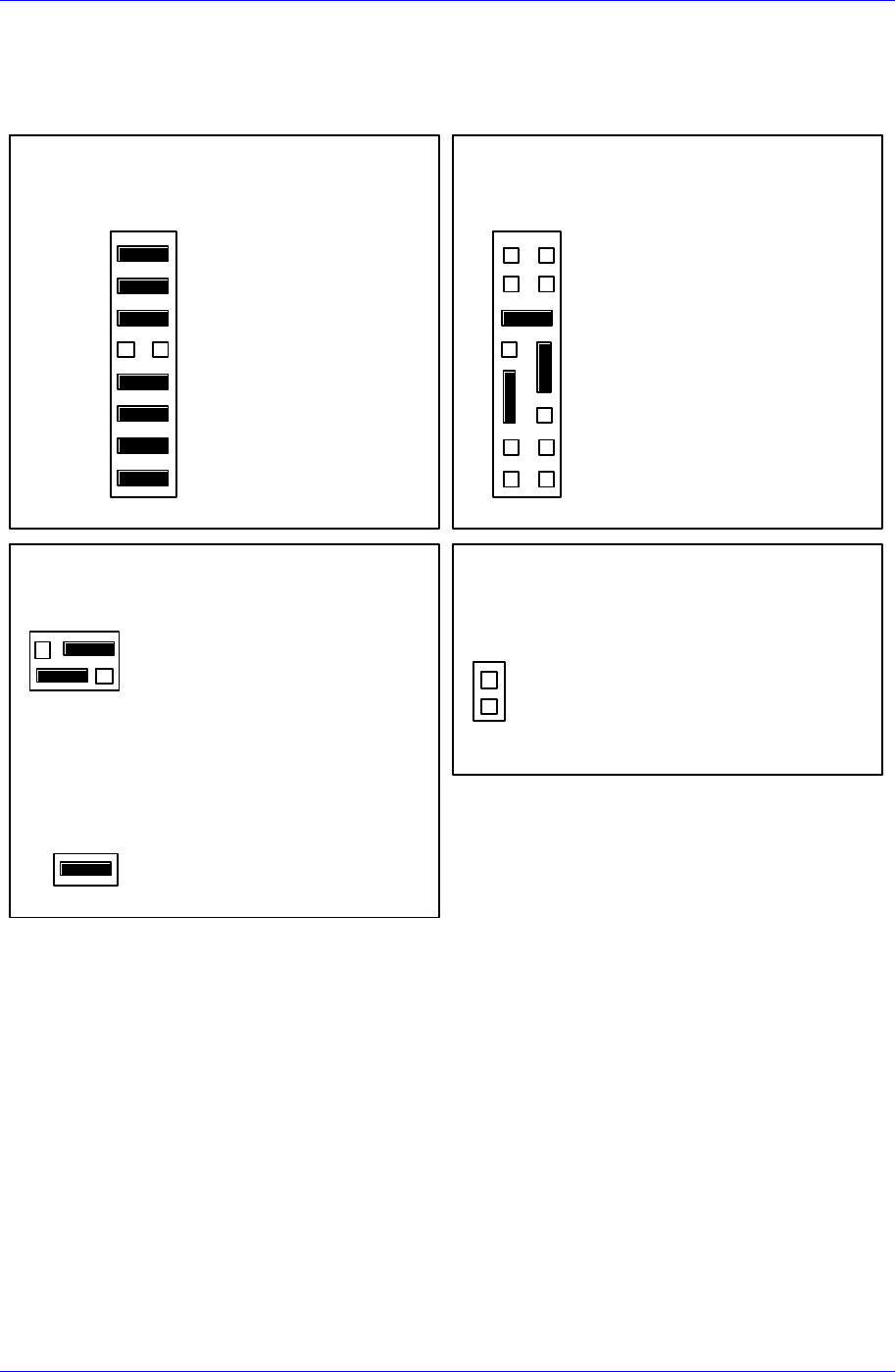
J13 : Primary Source VMEbus +5V STBY
2
1
J13
6
5
Primary Source VMEbus +5V STBY
Secondary Source Onboard Battery
J1 : System Controller
21
J1
System Controller (Factory configuration)
J14 : SCSI terminator disabled
2
1
J14
On-Board SCSI Bus Terminator Disabled
图
7-3. MVME162-220 Jumper Setting
7-27