1OM-1434-004_w.pdf - 第114页
1 - 55 (2) 识别补正 ( 角度补正 ) 旋转安装头,设定元件在线路板程序中指定的贴装角度 ( 贴装方向 )。 此时也可以补正根据元件识别得出的角度偏离 ( θ )。 Fig.1A35 (3) 元件排出 ( 元件排出箱 ) 在元件识别处理中识别为异常时,安装头向元件排出箱上移动,排出 元件。 Fig.1A36 元件排出 3.1.7 元件贴装 安装头向待机于线路板定位部的线路板的线路板程序中指定的贴装坐 标上移动。 此时补正根据元…
1-54
3.1.4 元件供给
安装在送料器安装台上的带式送料器传送元件到供给位置。
安装头随着 XY 横梁往 X 方向及 Y 方向移动,进行吸嘴的装卸、元件的
吸取、向线路板贴装元件等动作。
3.1.5 元件吸取
用安装在安装头上的吸嘴吸取元件。
3.1.6 元件识别
各安装头配备有线传感器,可进行吸取元件的有无、竖立、厚度计算
测量。
用元件识别照相机抓拍被吸嘴吸取着的元件的识别图像,并进行检查。
用元件识别照相机进行的元件识别根据照明方式的不同有透过识别方
式和反射识别方式,可自动切换到元件数据库中设定的照明方式。
Reference
有关识别原理请参照 [ 简短解说 ] 元件识别的原理内容。
(1) 元件识别处理
元件识别中进行以下三个处理。
・ 元件的有无检出
对象为全部元件。
・ 元件的检查
根据元件数据库进行各种检查。
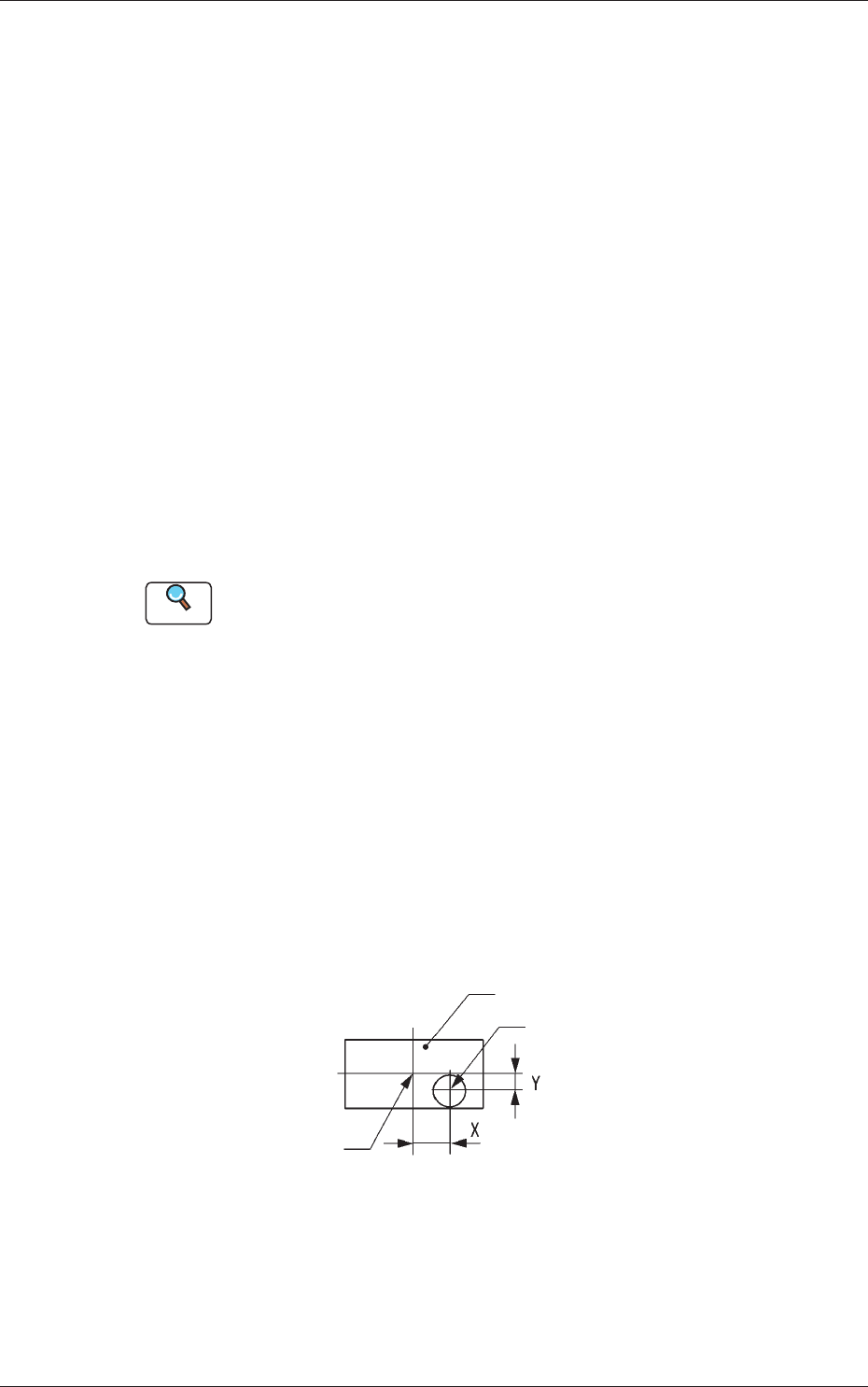
・ 元件的位置偏离和角度偏离的测定
测定元件识别照相机中心和元件中心之间的位置偏离 (X、Y) 和角度
偏离 (
θ
)。
Fig.1A34 吸嘴的元件吸取状态
3.1 线路板搬入和元件贴装
0710-001
元件
吸嘴
元件中心
1-55
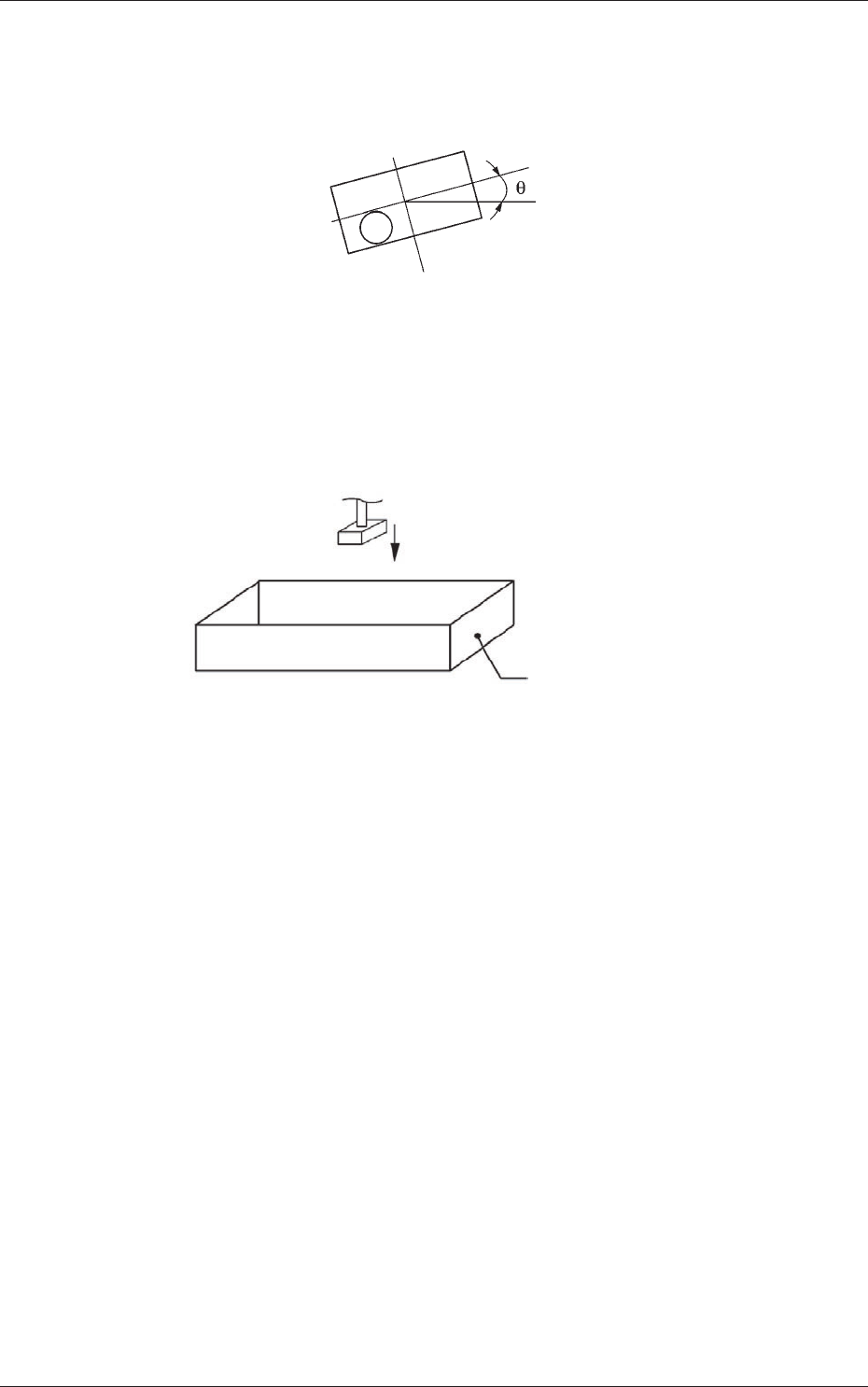
(2) 识别补正 ( 角度补正 )
旋转安装头,设定元件在线路板程序中指定的贴装角度 ( 贴装方向 )。
此时也可以补正根据元件识别得出的角度偏离 (
θ
)。
Fig.1A35
(3) 元件排出 ( 元件排出箱 )
在元件识别处理中识别为异常时,安装头向元件排出箱上移动,排出
元件。
Fig.1A36 元件排出
3.1.7 元件贴装
安装头向待机于线路板定位部的线路板的线路板程序中指定的贴装坐
标上移动。
此时补正根据元件识别测出的吸取位置偏离 (X、Y)。
以元件数据库为基础控制吸嘴的最下限。
关闭电磁阀,将吸嘴吸取的元件贴装到线路板上。
前 · 后横梁的一侧贴装元件,另一侧进行吸取动作,交替反复进行,
两横梁有效地进行实际贴装。
3.1 线路板搬入和元件贴装
0710-001
元件排出箱

1-56
3.1 线路板搬入和元件贴装
3.1.8 线路板搬出
元件贴装完成的线路板从线路板搬出部传送到后工序。
Note
后工序的排出使用非标准方式,后工序的线路板搬送速度慢时,请将
搬送速度调整到与后工序侧一致。
进行传送带的 Y 位置排列动作时,有可能发生线路板夹入。
请将装置系统
→
运行参数
→
前后工序模式设定
→
后工序设定的搬
送速度 ( 初期值 :300[mm/ 秒 ]) 调整到与后工序侧一致。
0710-001