JAKA 服务手册-zh-V3.1_20231017_20240108182934A001.pdf - 第184页
文档版本: 3.1 184 / 201 节卡服务手册 错误代码 描述 原因 措施 0x1 16010 关节二编码器温 度过热 编码器温度状态异常。 1. 请检查关节 温度是否超出使用范围 要求, 请降低使用工况。 2. 请联系节卡 技术服务人员检查关节 或编码 器是否存在异常。 0x126010 关节三编码器温 度过热 编码器温度状态异常。 1. 请检查关节 温度是否超出使用范围 要求, 请降低使用工况。 2. 请联系节卡 技术服务人员…
文档版本:3.1 183 / 201 节卡服务手册
错误代码
描述
原因
措施
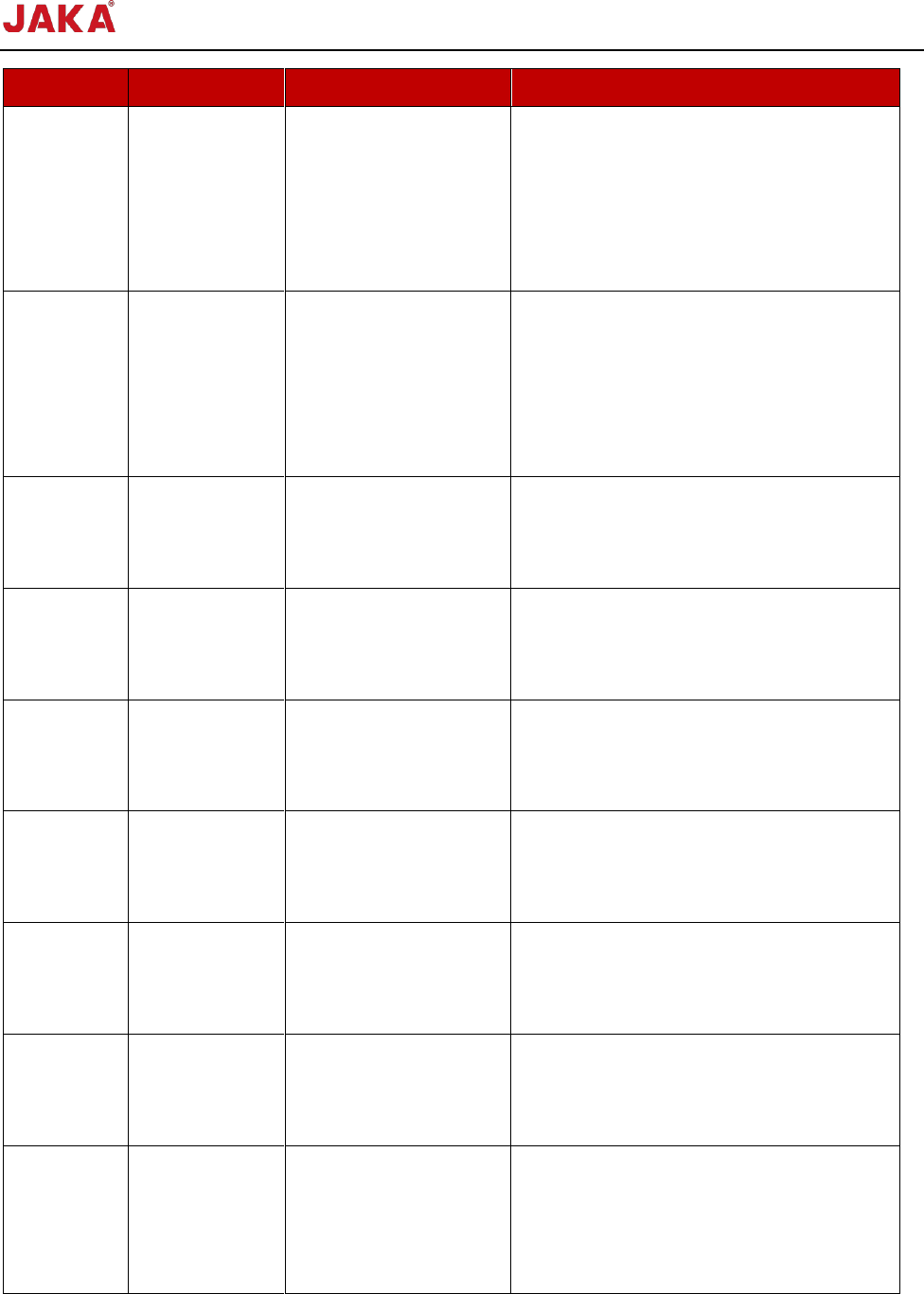
0x145282
关节五
EEPROM 错误
硬件 EEPROM 芯片读写
出错。
1.请尝试对机器人进行重新多次上下电测
试,检查是否存在时序波动,若仍存在问
题,请联系节卡技术服务人员。
2. 请联系节卡技术服务人员进行检查关节驱
动板是否存在异常。
0x155282
关节六
EEPROM 错误
硬件 EEPROM 芯片读写
出错。
1.请尝试对机器人进行重新多次上下电测
试,检查是否存在时序波动,若仍存在问
题,请联系节卡技术服务人员。
2. 请联系节卡技术服务人员进行检查关节驱
动板是否存在异常。
0x105283
关节一上使能失
败
上使能过程中,由于系
统其他故障导致使能失
败。
请查看系统中是否存在其他报错信息,将其
他报错信息进行处理后,再进行上使能操
作。
0x115283
关节二上使能失
败
上使能过程中,由于系
统其他故障导致使能失
败。
请查看系统中是否存在其他报错信息,将其
他报错信息进行处理后,再进行上使能操
作。
0x125283
关节三上使能失
败
上使能过程中,由于系
统其他故障导致使能失
败。
请查看系统中是否存在其他报错信息,将其
他报错信息进行处理后,再进行上使能操
作。
0x135283
关节四上使能失
败
上使能过程中,由于系
统其他故障导致使能失
败。
请查看系统中是否存在其他报错信息,将其
他报错信息进行处理后,再进行上使能操
作。
0x145283
关节五上使能失
败
上使能过程中,由于系
统其他故障导致使能失
败。
请查看系统中是否存在其他报错信息,将其
他报错信息进行处理后,再进行上使能操
作。
0x155283
关节六上使能失
败
上使能过程中,由于系
统其他故障导致使能失
败。
请查看系统中是否存在其他报错信息,将其
他报错信息进行处理后,再进行上使能操
作。
0x106010
关节一编码器温
度过热
编码器温度状态异常。
1. 请检查关节温度是否超出使用范围要求,
请降低使用工况。
2. 请联系节卡技术服务人员检查关节或编码
器是否存在异常。
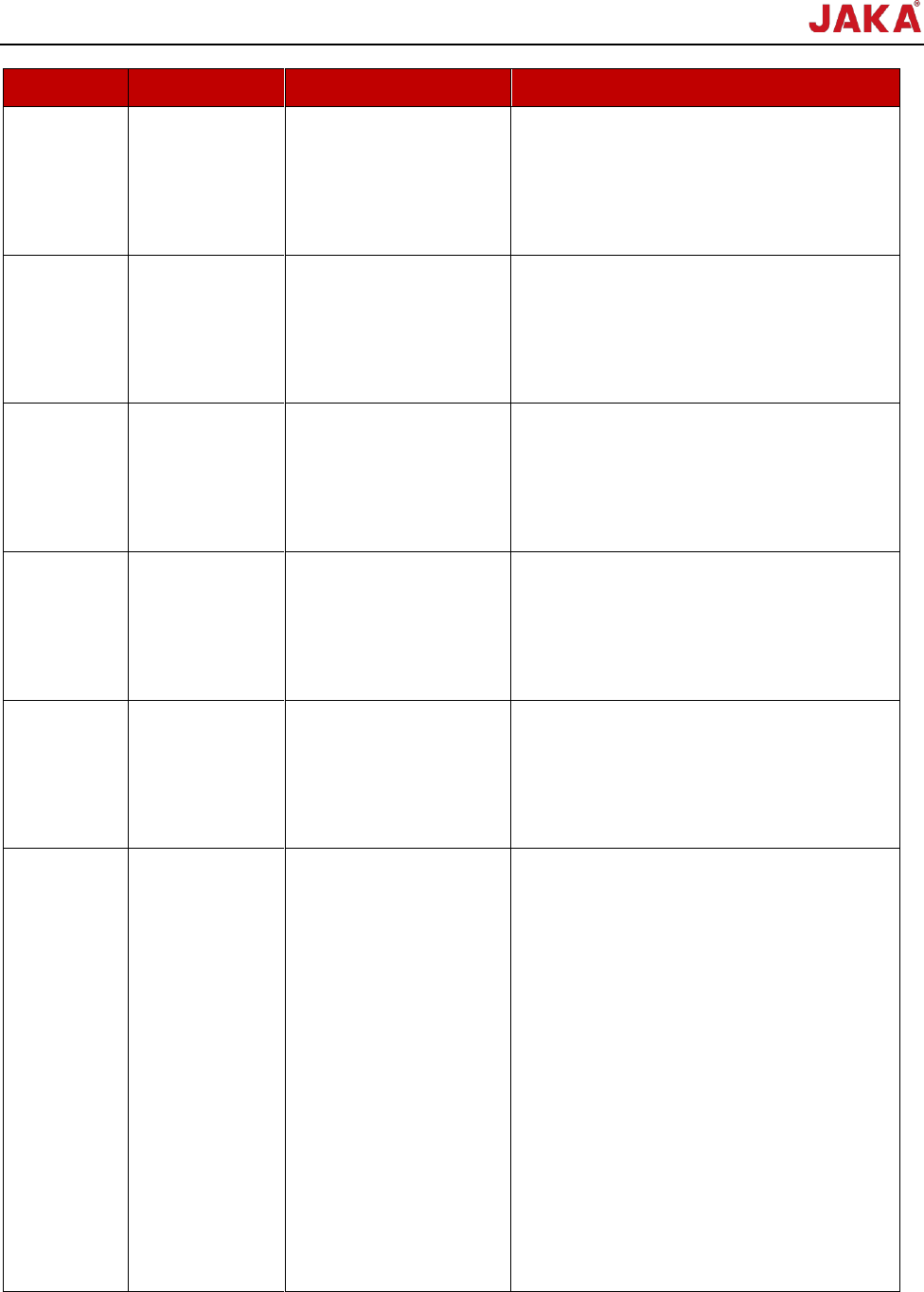
文档版本:3.1 184 / 201 节卡服务手册
错误代码
描述
原因
措施
0x116010
关节二编码器温
度过热
编码器温度状态异常。
1. 请检查关节温度是否超出使用范围要求,
请降低使用工况。
2. 请联系节卡技术服务人员检查关节或编码
器是否存在异常。
0x126010
关节三编码器温
度过热
编码器温度状态异常。
1. 请检查关节温度是否超出使用范围要求,
请降低使用工况。
2. 请联系节卡技术服务人员检查关节或编码
器是否存在异常。
0x136010
关节四编码器温
度过热
编码器温度状态异常。
1. 请检查关节温度是否超出使用范围要求,
请降低使用工况。
2. 请联系节卡技术服务人员检查关节或编码
器是否存在异常。
0x146010
关节五编码器温
度过热
编码器温度状态异常。
1. 请检查关节温度是否超出使用范围要求,
请降低使用工况。
2. 请联系节卡技术服务人员检查关节或编码
器是否存在异常。
0x156010
关节六编码器温
度过热
编码器温度状态异常。
1. 请检查关节温度是否超出使用范围要求,
请降低使用工况。
2. 请联系节卡技术服务人员检查关节或编码
器是否存在异常。
0x107180
关节一电机过载
(I2T)
电机输出大电流,并且
持续了一段时间。
1. 请检查机器人报警过载之前是否发生了碰
撞。
2. 请检查关节实际的负载是否已经严重超出
机器人的标称负载。
3. 请联系节卡技术服务人员检查报警关节的
参数。
4. 请通过拖拽模式检查关节制动器机构是否
异常。
5. 请联系节卡技术服务人员检查关节是否出
现机械性卡涩。
6. 请联系节卡技术服务人员检查转子 ABZ
编码器是否读取异常。
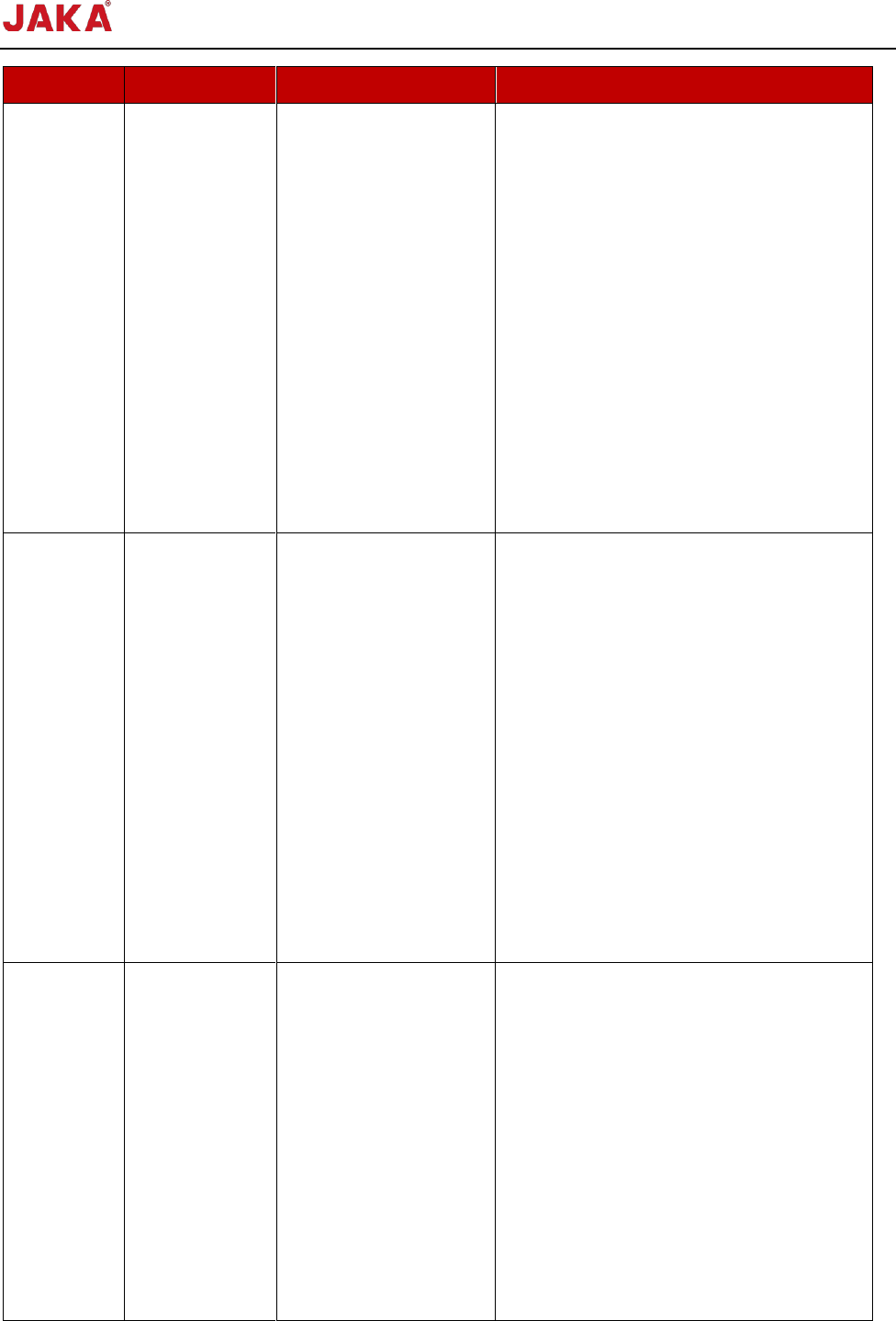
文档版本:3.1 185 / 201 节卡服务手册
错误代码
描述
原因
措施
0x117180
关节二电机过载
(I2T)
电机输出大电流,并且
持续了一段时间。
1. 请检查机器人报警过载之前是否发生了碰
撞。
2. 请检查关节实际的负载是否已经严重超出
机器人的标称负载。
3. 请联系节卡技术服务人员检查报警关节的
参数。
4. 请通过拖拽模式检查关节制动器机构是否
异常。
5. 请联系节卡技术服务人员检查关节是否出
现机械性卡涩。
6. 请联系节卡技术服务人员检查转子 ABZ
编码器是否读取异常。
0x127180
关节三电机过载
(I2T)
电机输出大电流,并且
持续了一段时间。
1. 请检查机器人报警过载之前是否发生了碰
撞。
2. 请检查关节实际的负载是否已经严重超出
机器人的标称负载。
3. 请联系节卡技术服务人员检查报警关节的
参数。
4. 请通过拖拽模式检查关节制动器机构是否
异常。
5. 请联系节卡技术服务人员检查关节是否出
现机械性卡涩。
6. 请联系节卡技术服务人员检查转子 ABZ
编码器是否读取异常。
0x137180
关节四电机过载
(I2T)
电机输出大电流,并且
持续了一段时间。
1. 请检查机器人报警过载之前是否发生了碰
撞。
2. 请检查关节实际的负载是否已经严重超出
机器人的标称负载。
3. 请联系节卡技术服务人员检查报警关节的
参数。
4. 请通过拖拽模式检查关节制动器机构是否
异常。
5. 请联系节卡技术服务人员检查关节是否出
现机械性卡涩。