JM-10_动作说明书.pdf - 第78页
动作说明书 5-14 5-1-9 DRV-IO 基板 DRV-IO 基板通过专用的串行 I/F 与 IO MI 基板进行通信,是对径向送料器、碗式送料器等进行控制的基 板 。 下面是控制的内容 。 (1 )径向送料器内部电磁阀的驱动 (2 )碗式送料器内部电磁阀的驱动 (3 )碗式送料器内部的传感器 (4 )碗式送料器内部电动机的驱动 (5 )碗式送料器台架的定位传感器 以下是 DRV-IO 基板功能方块图。 コン トロー ラ (FPG…
动作说明书
5-13
5-1-8 LIGHT CTRL 基板
LIGHT CTRL 基板通过专用的串行 I/F 与 IO MI 基板进行通信,是对 VCS 照明进行控制的基
板
。
下面是控制的内容
。
①
同轴照明的控制(COAXIAL LIGHT 基板)
②
下方照明的控制(BOTTOM LIGHT 基板)
③
红色侧向照明(上)的控制(SIDE LIGHT 基板)
④
蓝色侧向照明(上)的控制(SIDE LIGHT 基板)
⑤
红色侧向照明(下)的控制(SIDE LIGHT 基板)
⑥
蓝色侧向照明(下)的控制(SIDE LIGHT 基板)
注:红色侧向照明和蓝色侧向照明中只能某一方亮灯。
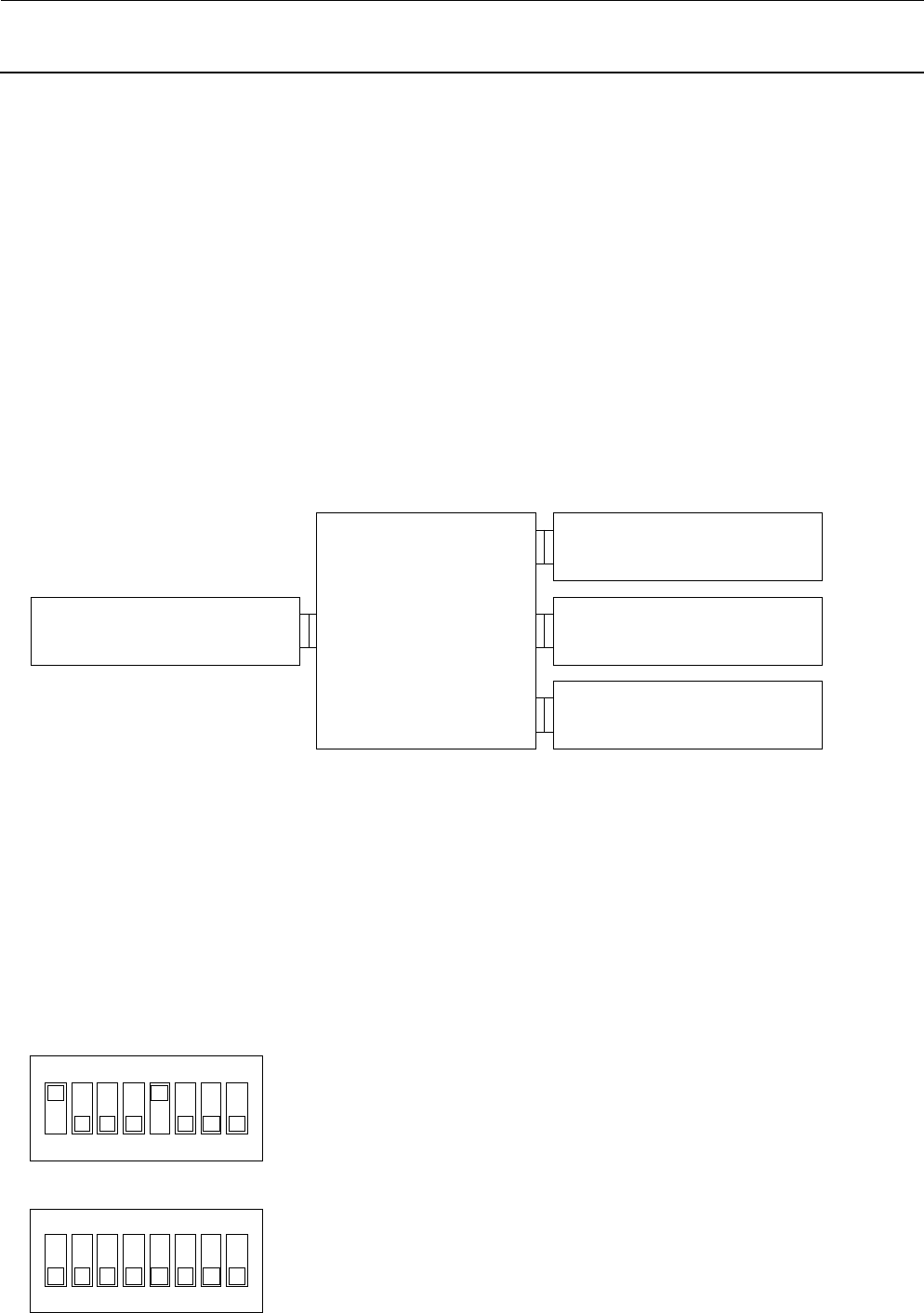
以下所示为与 VCS 相关的基板。
LIGHT CTRL基板
同軸照明基板
(COAXIAL LIGHT基板)
下方照明基板
(BOTTOM LIGHT基板)
サイド照明基板
(SIDE LIGHT基板)
IO-CONVEYOR基板
LIGHT CTRL 基板上安装 5 个 LED。以下是各 LED 的意义。
LD1
(绿) ;正在输入+12V 时亮灯
。
LD2
(绿) ;正在输入-12V 时亮灯
。
LD3
(绿) ;正在从+24V 输出由基板内部生成的 3.3V 时亮灯
。
LD4
(绿) ;正在从+24V 输出由基板内部生成的 5V 时亮灯
。
LD5
(绿) ;+24V 正在输入到基板内部时亮灯
。
LIGHT CTRL
基板上安装 2 个 Dip 开关。以下所示为各开关的意义。
1
O
N
2
3
4
5
6
7
8
SW2
パターン及び機能REV.設定用
Bit1~Bit4:機能REV.
Bit5~Bit6:パターンREV.
設定は、LIGHT CTRL PCB ASM REVISION NOTE
を参照のこと。
1
O
N
2
3
4
5
6
7
8
SW3
機能設定用
すべてOFF設定。
IO MI 基板 LIGHT CTRL基板
同轴照明基板
(COAXIAL LIGHT 基板)
下方照明基板
(BOTTOM LIGHT 基板)
侧向照明基板
(SIDE LIGHT 基板)
用于设定图形及功能版本
Bit1~Bit4: 功能版本
Bit5~Bit6: 图形版本
设定要参照 LIGHT CTRL PCB ASM REVISION NOTE。
功能设置用
全部设置为 OFF
。
动作说明书
5-14
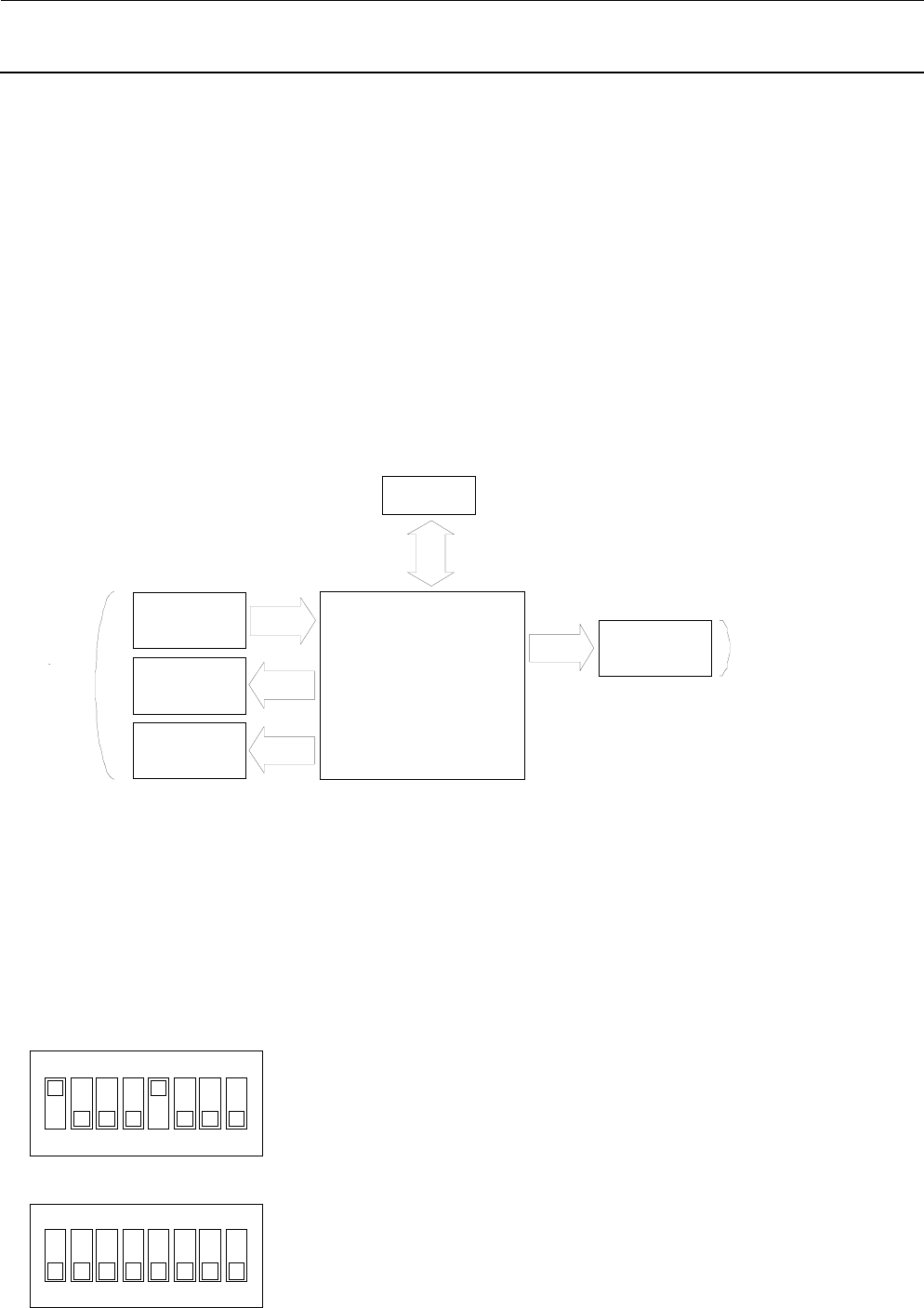
5-1-9 DRV-IO 基板
DRV-IO
基板通过专用的串行 I/F 与 IO MI 基板进行通信,是对径向送料器、碗式送料器等进行控制的基
板
。
下面是控制的内容
。
(1
)径向送料器内部电磁阀的驱动
(2
)碗式送料器内部电磁阀的驱动
(3
)碗式送料器内部的传感器
(4
)碗式送料器内部电动机的驱动
(5
)碗式送料器台架的定位传感器
以下是 DRV-IO 基板功能方块图。
コントローラ
(FPGA)
シリパラI/F
トランジスタI/F
トランジスタI/F
センサ入力I/F
モータドライバ
DRV-IO
基板上安装 5 个 LED。以下是各 LED 的意义。
LD1
(红) ;FPGA 的程序写入结束时亮灯。
LD2
(橙色) ;正在从+24V 输出由基板内部生成的 5V 时亮灯
。
LD3
(橙色) ;正在从+24V 输出由基板内部生成的 3.3V 时亮灯
。
LD4
(橙色) ;+24V 正在输入到基板内部时亮灯
。
DRV-IO
基板上安装 2 个 Dip 开关。以下所示为各开关的意义。
1
O
N
2
3
4
5
6
7
8
SW2
パターン及び機能REV.設定用
Bit1~Bit4:機能REV.
Bit5~Bit6:パターンREV.
設定は、DRV-IO PCB ASM REVISION NOTE
を参照のこと。
1
O
N
2
3
4
5
6
7
8
SW3
機能設定用
すべてOFF設定。
并串行 I/F
碗式
送料器
I/F
晶体管 I/F
传感器输入
I/F
电动机驱动器
径向送料器
I/F
晶体管 I/F
控制器
(FPGA)
用于设定图形及功能版本
Bit1~Bit4: 功能版本
Bit5~Bit6: 图形版本
设定要参照 DRV-IO PCB ASM REVISION NOTE。
功能设置用
全部设置为 OFF
。
动作说明书
5-15
5-2 马达的控制方式
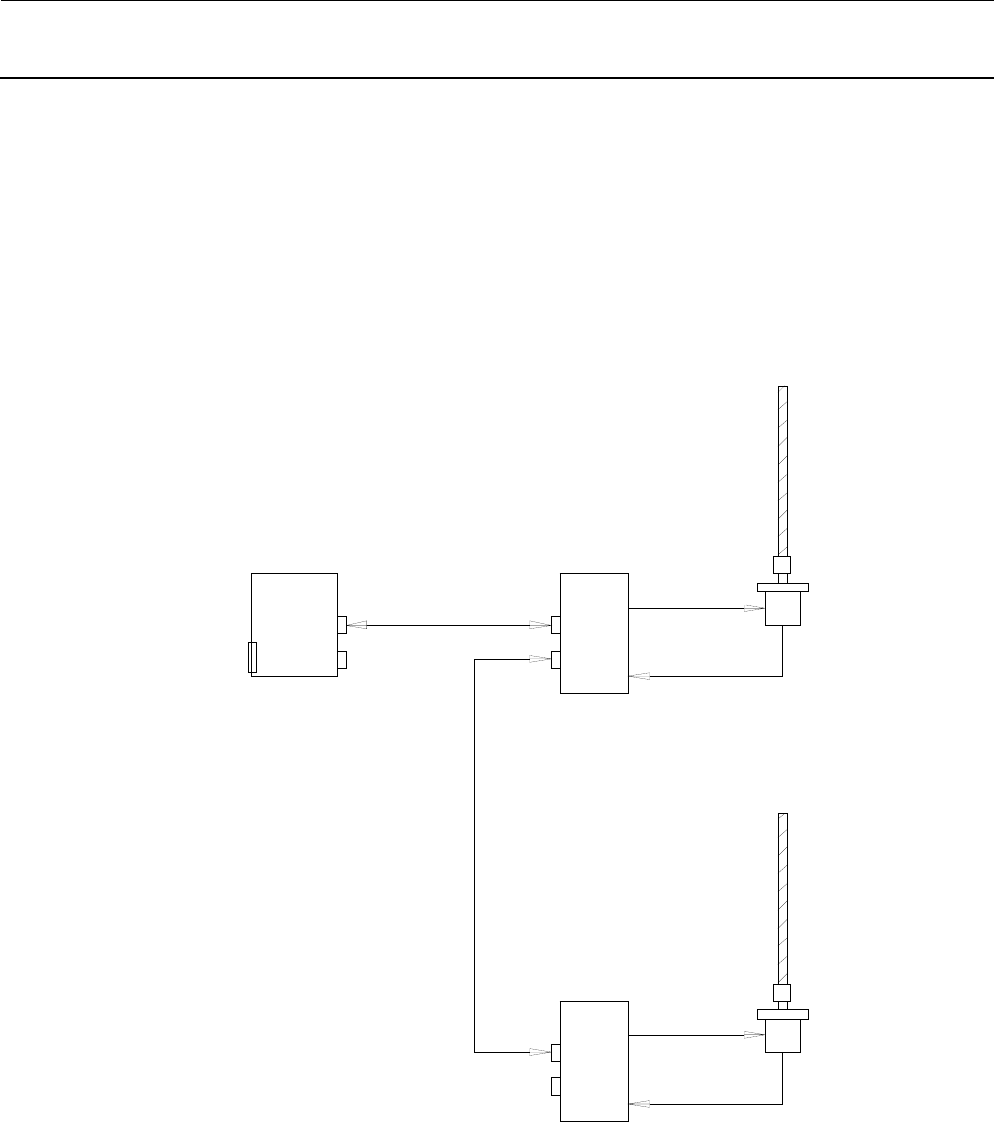
5-2-1 XY 轴的控制方式
X、Y 轴均由 1 个电动机进行悬臂驱动,控制采用半闭环控制方式,进行元件贴装头的移动控制。
X
轴及 Y 轴的控制组成图如下所示。
CPCI Bus
POSITION BOARD
CH0
CH1
X軸SERVO AMP
UVW相駆動出力
エンコーダ出力
(三菱シリアル)
Y軸SERVO AMP
UVW相駆動出力
SSCNETⅢ
(光通信)
X軸ボールネジ
(リードピッチ30mm)
X軸ボールネジ
(リードピッチ32mm)
エンコーダ出力
(三菱シリアル)
SSCNETⅢ
(光通信)
各 X、Y 驱动器的控制,采用三菱运动控制系统,即 SSCNETⅢ,以光 50Mbps 的通信速度进行 0.44ms 周
期的电动机控制。
关于控制,X 轴、Y 轴均通过利用滚珠螺杆的半闭环控制进行驱动。
X 轴滚珠螺杆
(螺距 30mm)
SSCNETⅢ
(光通信)
SSCNETⅢ
(光通信)
X 轴放大器
UVW 相驱动输出
编码器输出
(三菱串行)
UVW 相驱动输出
编码器输出
(三菱串行)
Y 轴滚珠螺杆
(螺距 32mm)
Y 轴放大器