XPF-L 服务工程师训练手册中文版.pdf - 第142页
16. 顺时针转动 tray catch stopper , 使其刚好接触到 shuttle roller 。 Roller Tray catch stopper Temporarily adjust the tray catch stopper so that it contacts the roller. 17. 向正方向移动 U 轴到 shuttle clamp claw 被打开到大约 14mm. 18. 选择 [Settings…
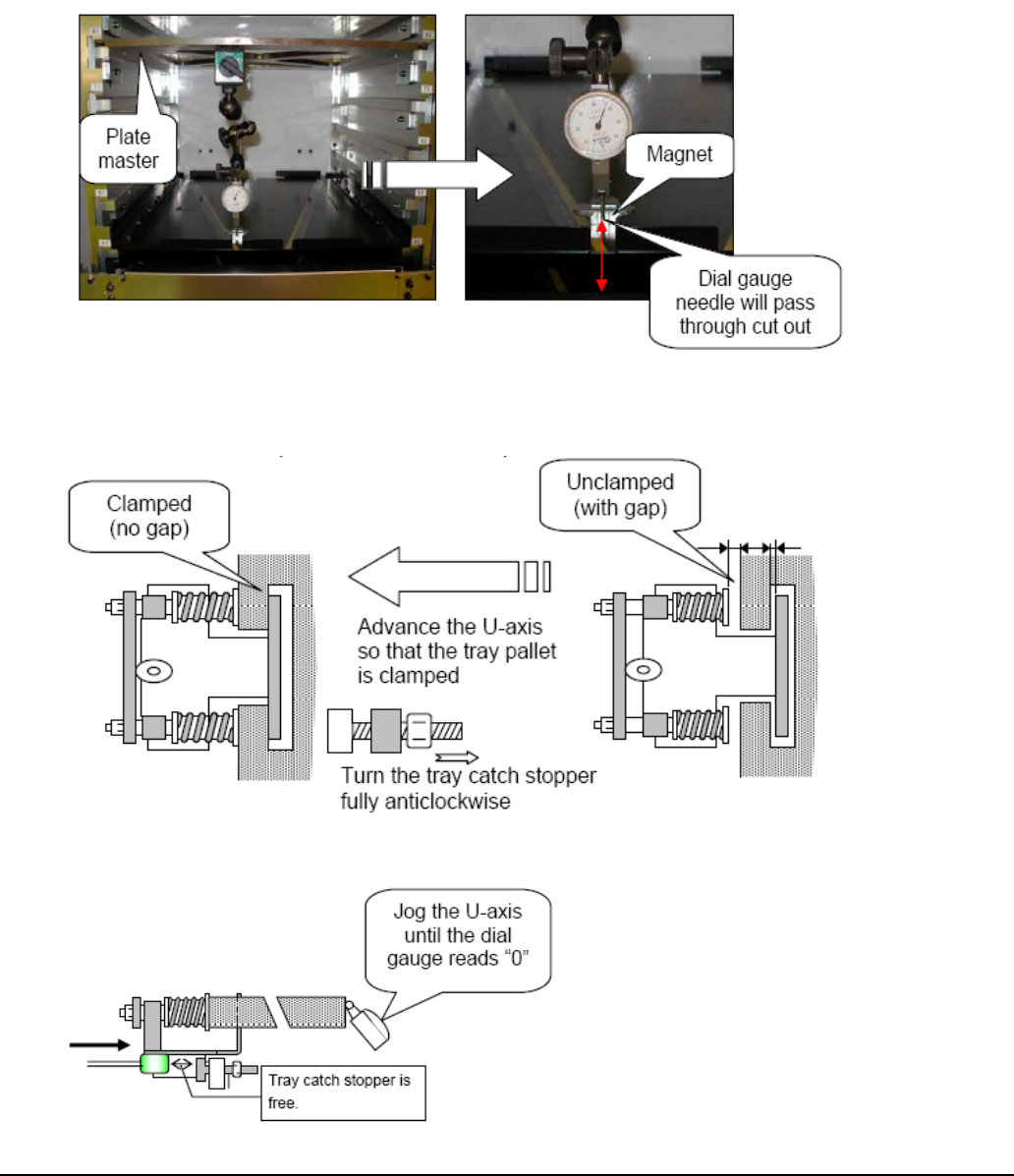
13. 将百分表设在料架后部的tray pallet上,并使百分表的读数为“0),如下图(请不要移动tray pallet
的位置,请将百分表的表头设在tray pallet 的却口处,以使tray pallet向前移动时,表头不受tray
pallet 的干扰)。
14. 向前移动U轴到tray pallet被夹住,拧松tray catch stopper的锁紧螺母,并反时针转动tray catch
stopper ,使其在下一步中不要接触到shuttle clamper roller.
15.在tray pallet仍被夹住,慢慢将U轴回移到百分表读数为“0”。检查tray catch stopper没同shuttle roller
相接触,确定tray pallet仍被夹住。
126 Fuji Machine Mfg. Co., Ltd FK-9F98-55-0E
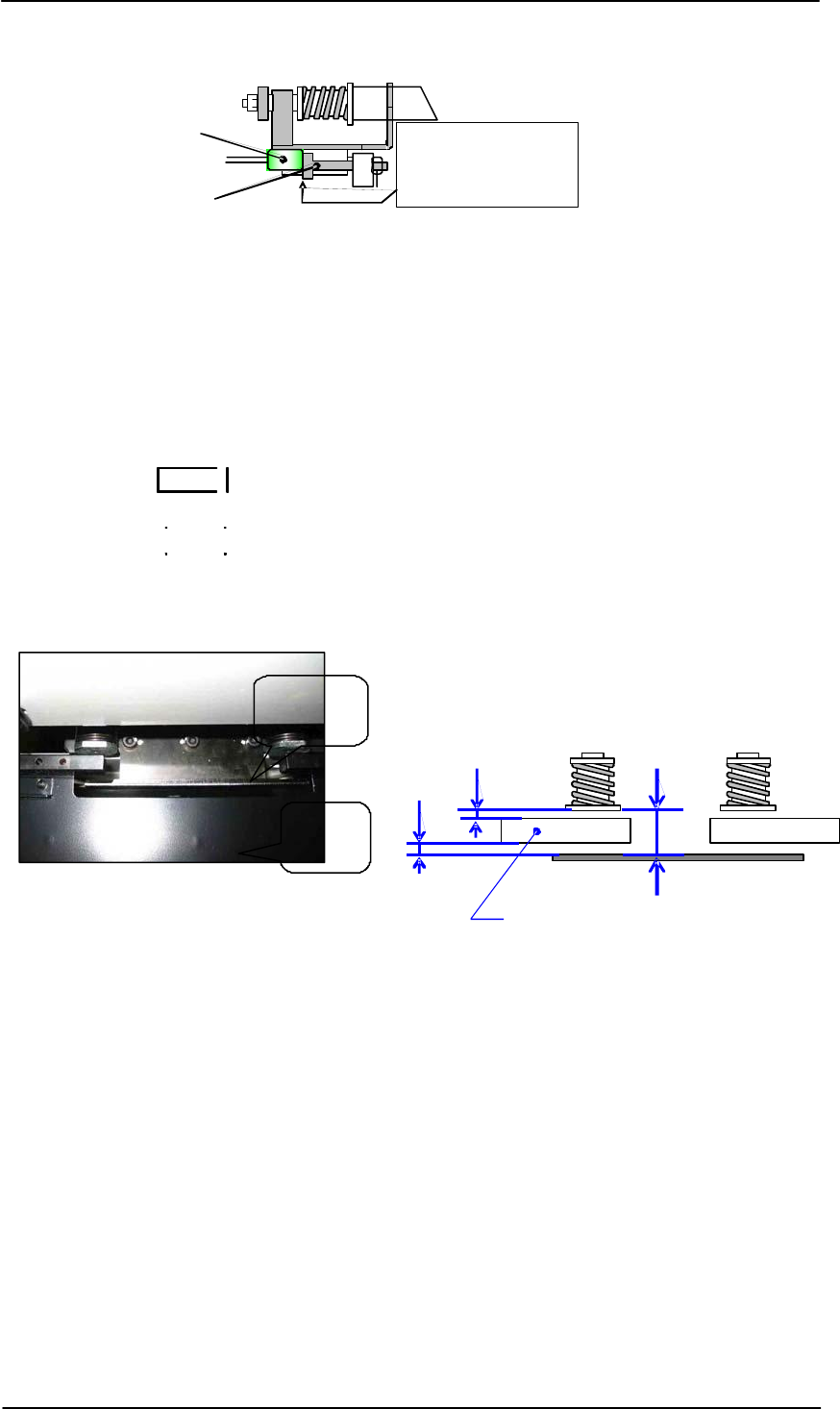
16. 顺时针转动tray catch stopper , 使其刚好接触到shuttle roller。
Roller
Tray catch stopper
Temporarily adjust the
tray catch stopper so
that it contacts the roller.
17. 向正方向移动U轴到shuttle clamp claw 被打开到大约14mm.
18. 选择 [Settings and management] – [Edit point table] 到显示 edit point table的画面。
19. 从servo 轴的清单上选择U轴,在[Direct Servo Input] 检查框上选上。
20. 在edit point table上,保存“前”和”后”的极限位置.
21. 在负方向上移动U轴约100MM.
22. 选择
>>> 快速移动键,移回U轴到停止位(当到达正极限时,U轴会自动停止)
23. 检查百分表的读数在0至0..1MM内.如果吧在范围,重做13至18步,精确调整tray catch stopper 和
U轴回退的位置.
24. 也检查tray pallet 大致在shuttle clamper的中心位置。
Shuttle
clamper
app.3mm
Tray
Pallet
app.3mm
tray pallet
14 mm
25. 移动U轴到正极限,并bypass U轴的马达锁(有关祥细资料,请参照本章前的bypass U 和T轴
马达锁的相关信息)。
26. 手动将tray pallet 夹在shuttle clamp claw 中。
27.手动将U轴向正极限移动到tray catch stopper刚好接触到roller的位置(此时,shuttle clamp claw
的弹簧没接触到)。
28. 选择 [Settings and management] – [Edit point table] 到 显示 edit point table
画面。
29. 从servo 轴清单中,选择U轴,在[Direct Servo Input] 检查框中,选用此项。
30. 在edit point table 中,保存当前位置,作为 “Clamp Tray Pallet”。
31. 从MTU上,拿下短接接头。
FK-9F98-55-0E
Fuji Machine Mfg. Co., Ltd
127
13.16 调整 the tray catcher 原点位置的检查sensor
1. 选择 [Settings and management] – [Edit point table]到显示edit point table
画面。
2. 从servo 轴中,选择U轴,记录“Back”的数值。
3. 移动U轴的servo 数到“Back”的位置。
4. 找到sensor刚好ON的位置。
I/O: RX030 MTU_ShuttleRetChk
5. 在ON的方向,将sensor再移多0.5MM,并锁紧此sensor.
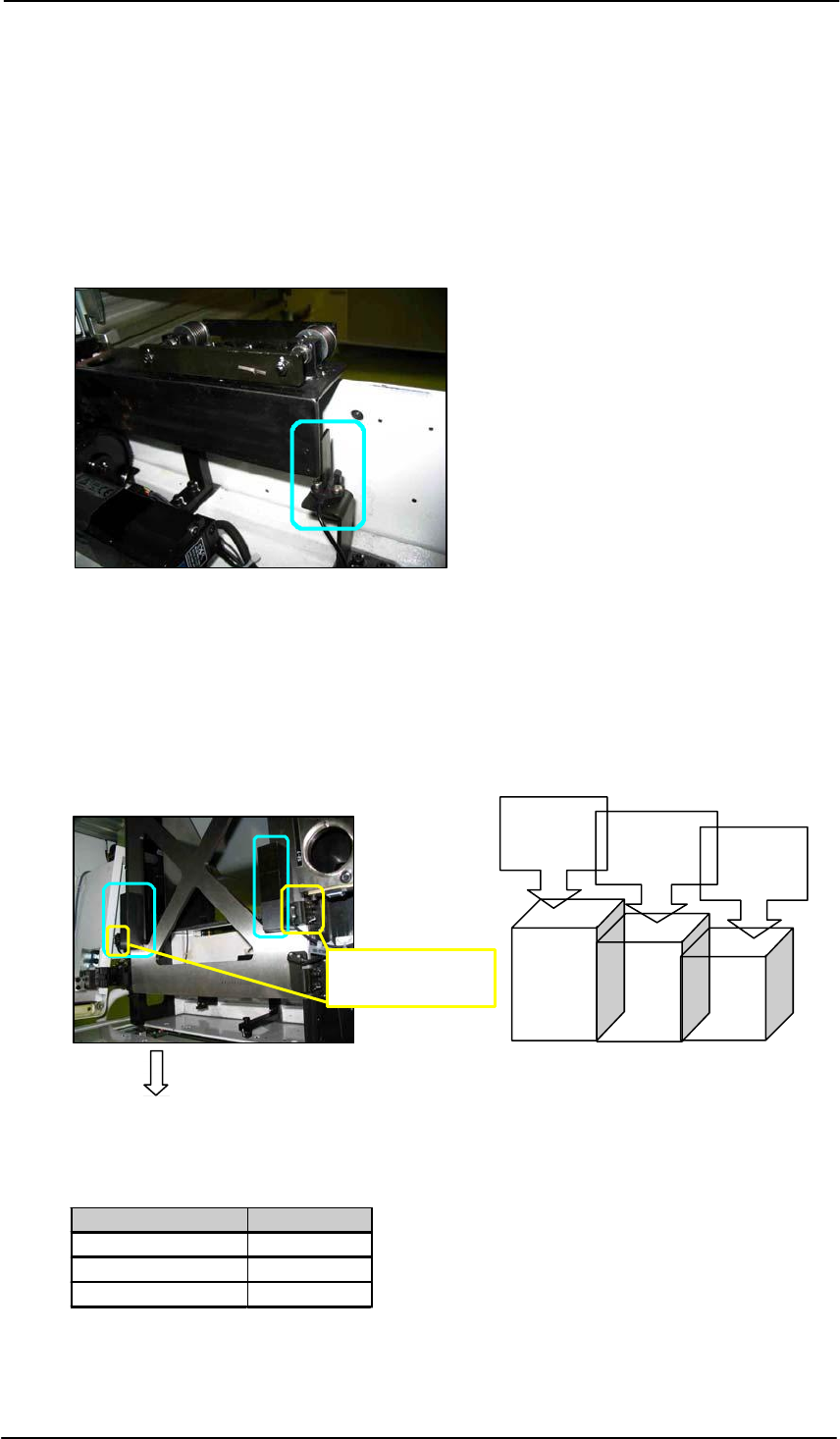
13.17 调整shuttle interlock sensor
1. 将 tray pallet master jig 装在U轴的运送带上。
2. 将 two of the three-step jigs 放在 tray pallet master jig上,使其对准interlock sensor, 如下图所
示。
Height
ブロックジグ( Z9631DEPJ3750)
Shuttle interlock
sensor
33.5 mm
1
Height
33.25 mm Height
33.0 mm
2 3
Tray tower side
Three step jig Z9631DEPJ3750
3. 调整发射和接受sensor的高度, 当step 1 jig对准时,使 [X018 TrayPaleHeightChk]
OFF 当step3 sensor对准时,使 [X018 TrayPaleHeightChk] ON.
Jig combination I/O Status
Step 1 + Step 1 OFF
Step 1 + Step 3 OFF
Step 3 + Step 3 ON
128
Fuji Machine Mfg. Co., Ltd
FK-9F98-55-0E