SIPLACE D1 规格说明书英文版.pdf - 第31页
31 Vision Sensor Technology PCB Position Recognition Bad Board Position Recognition Ink spot criteria Methods • Synthe tic fiducial recogn ition method • Mean grayscale value • Histogram method • Template matching Shapes…
30
Vision Sensor Technology
PCB Position Recognition
Description
Different fiducial shapes
prove to be optimal depend-
ing on the condition of the
surface. Particularly advis-
able for bare copper surfaces
with little oxidation is the
single cross. Maximum
accuracy is achieved due to
the high information content.
Rectangle, square and circle
are less "informative" but
save space and can even be
used when oxidation is at an
advanced stage. Advisable
for tinned structures are
circle or square because in
this case the ratio of the fidu-
cial dimensions to the pre-
solder thickness is
particularly favorable.
Fiducial criteria
Locate 2 fiducials
Locate 3 fiducials
X-/Y-position, rotation angle, mean PCB distortion
in addition: shear, distortion in X- and Y-direction separately
Fiducial shapes Synthetic fiducials: circle, cross, square, rectangle, rhom-
bus, circular, square, and rectangular contours, double
cross, any pattern
Fiducial surface:
copper
tin
Without oxidation and solder resist
Fiducial warp 1/10 of structure width, both with good con-
trast to environment
Dimensions of synthetic fiducials
min. X/Y size for circle and rectangle: 0.25 mm
min. X/Y size for annulus and rectangle: 0.3 mm
min. X/Y size for cross: 0.3 mm
min. X/Y size for double-cross: 0.5 mm
min. X/Y size for lozenge: 0.35 mm
min. frame width for annulus and rectangle: 0.1 mm
min. bar width / bar distance for cross, double-cross: 0.1 mm
max. X/Y size for fiducial shapes: 3 mm
max. bar width for cross / double-cross: 1.5 mm
min. tolerances, general: 2% of nominal dimension
max. tolerances, general: 20% of nominal dimension
Dimensions of patterns
min. size
max. size
0.5 mm
3 mm
Fiducial environment Clearance around reference fiducial not necessary if there
is no similar fiducial structure in the search area
31
Vision Sensor Technology
PCB Position Recognition
Bad Board Position Recognition
Ink spot criteria
Methods • Synthetic fiducial recognition method
• Mean grayscale value
• Histogram method
• Template matching
Shapes and sizes of fiducials/structures for
synthetic fiducials
other methods
For dimensions of synthetic fiducials,
see page 30
min. 0.3 mm
max. 5 mm
Masking material good coverage
Recognition time depends on the method: 20 ms - 200ms
Description
In the cluster technology
each subpanel is assigned
an ink spot. If this is present
during the measurement via
the PCB vision module, the
corresponding subpanel is
populated.
With this function it is pos-
sible to eliminate costs due
to unnecessary population of
faulty subpanels.
Technical data for PCB position recognition
PCB fiducials
Local fiducials
Library memory for recognition
of bad panels
up to 3 (subpanels and multiple panels)
up to 6 for the Long board option (Optional PCB fiducials
are output by the optimization.)
up to 2 per PCB (may be of different type)
up to 255 fiducial types per subpanel
Image analysis Edge detection method (Singular feature) based on gray-
scale values
Lighting method Front lighting
Fiducial recognition time 0.1 s
Field of vision 5.78 x 5.78 mm
32
Vision Sensor Technology
2D Coplanarity Laser Module
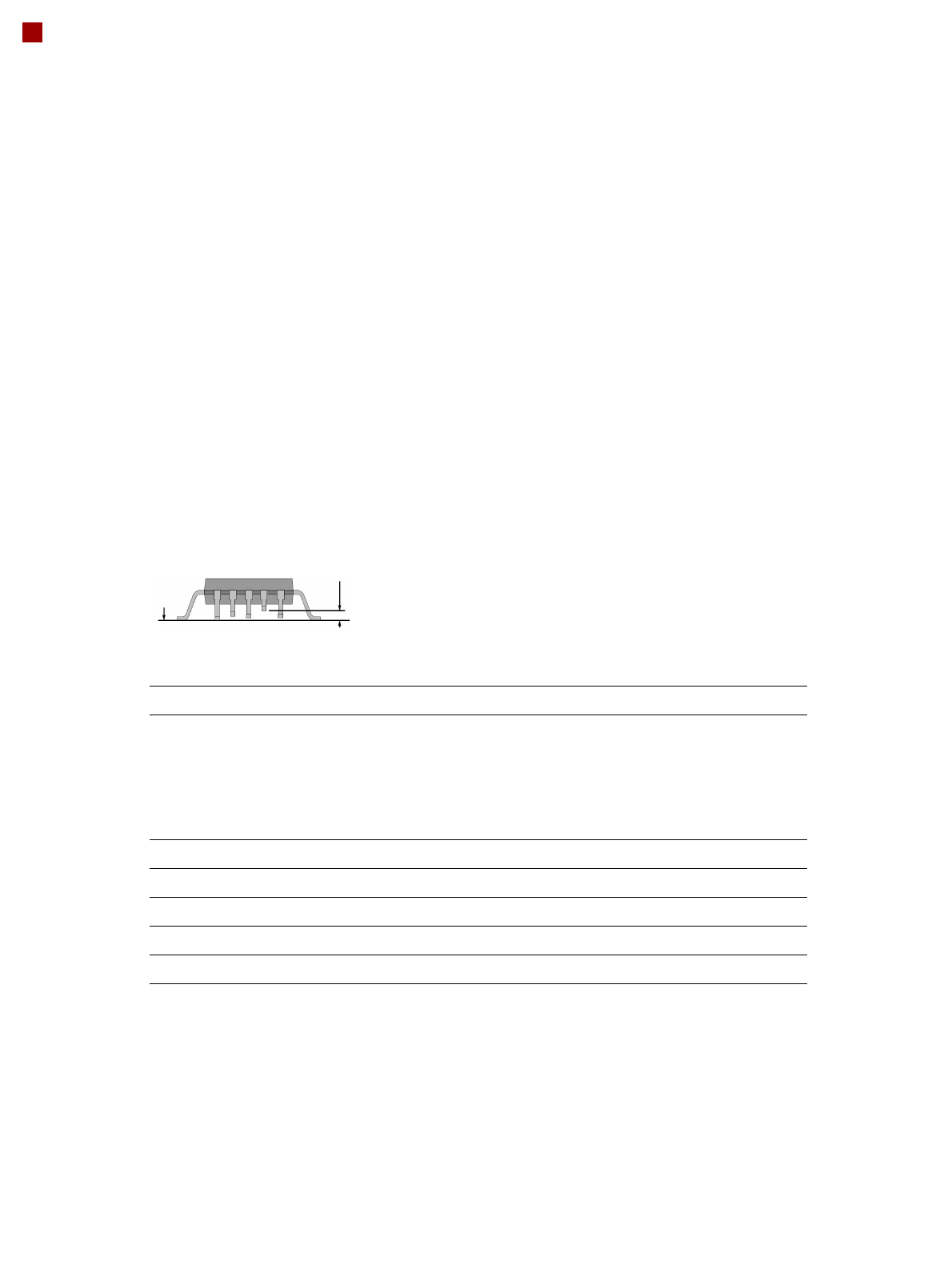
Description
Coplanarity of connections
on a component means that
all connections lie on a level,
the so-called placement
plane. This level is created
from the height information
from the coplanarity mea-
surement. This ensures that
the same soldering condi-
tions apply for all connec-
tions.
Measuring principle
Measurement of the heights
of the connections occurs
contact-free according to the
principle of laser-triangula-
tion. For the 2D method, a
point laser beam scans the
component. The reflected
light from the laser is pro-
jected onto a sensor. In this
way the height information
for the connections is
obtained from the reflected
light from the laser.
Restrictions
• The component must
have a minimum of two
and a maximum of four
rows of gull-wing leads.
• The row of leads should
be located orthogonally to
each other.
• The leads should be
trained orthogonally to the
row of leads.
• The ends of the leads lie
on a straight line.
• Measurement of compo-
nents with just one row of
leads is not possible.
Place-
ment
level
Deviation from
coplanarity
Technical data
Components Gullwing
Accuracy ± 18.5 µm (3 (reference component)
± 24.7 µm (4
± 30.5 µm (3 (components up to 32 mm)
± 40.7 µm (4
± 31.3 µm (3 (components up to 55 mm)
± 41.7 µm (4
Max. component size 55 x 55 mm²
Min. lead pitch 300 µm
Max. component height 25 mm
Positioning option Location 2
Placement head type Pick&Place head