IS620P系列伺服用户手册.pdf - 第155页
7 IS620P 系列伺服用户手册简易版 第 7 章 功能码参数一览表 - 155 - 功能码 名称 设定范围 单位 出厂设定 生效 方式 设定 方式 相关 模式 H05 13 电子齿数比 2( 分母 ) 1~1073741824 - 10000 立即 生效 运行 设定 P H05 15 脉冲指令形态 0- 脉冲 + 方向,正逻辑 1- 脉冲 + 方向,负逻辑 2-A 相 +B 相正交脉冲, 4 倍频 3-CW+CCW - 0 再次 通…
7
第
7
章 功能码参数一览表
IS620P
系列伺服用户手册简易版
- 154 -
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
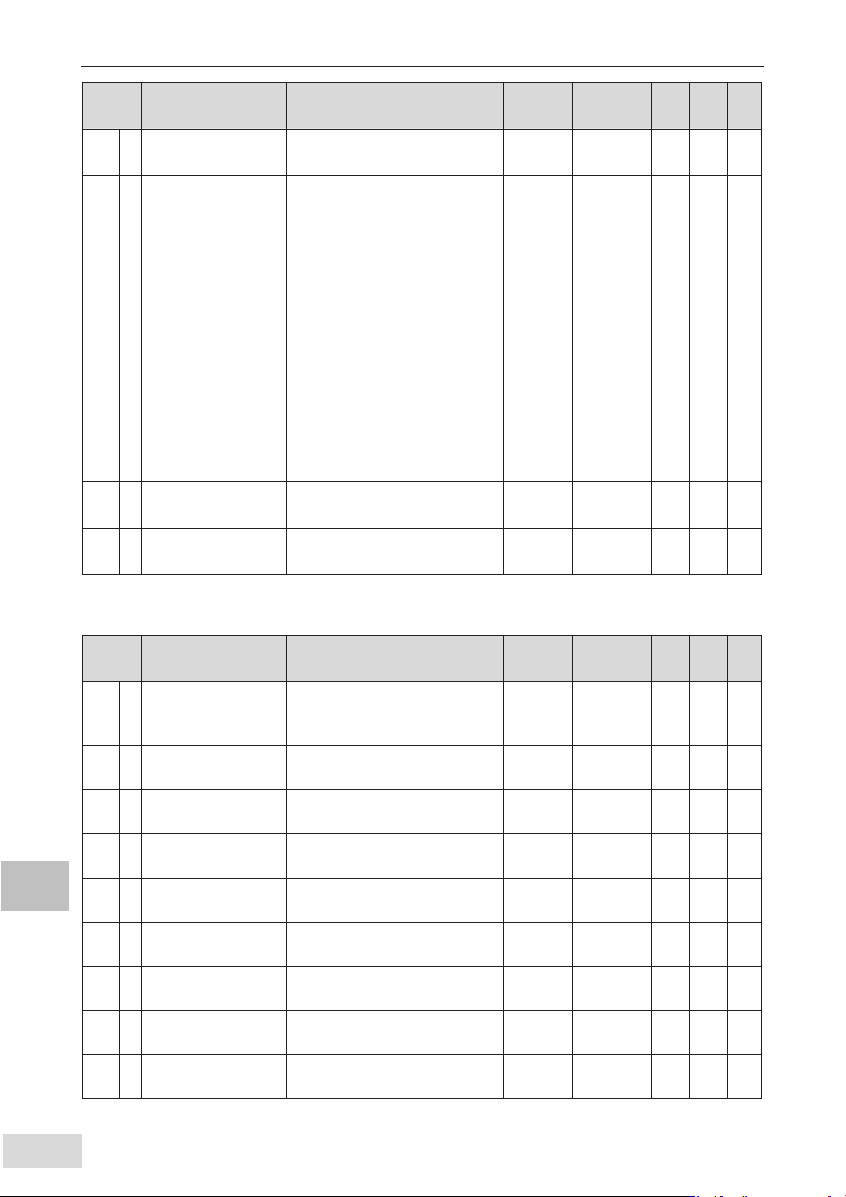
H04 52 AO1 倍率 -99.99 ~99.99 倍 1.00
立即
生效
运行
设定
-
H04 53 AO2 信号选择
00- 电机转速 (1V/1000rpm)
01- 速度指令 (1V/1000rpm)
02- 转矩指令 (1V/100%)
03- 位置偏差
(0.05V/ 指令单位 )
04- 位置偏差
(0.05V/ 编码器单位 )
05- 位置指令速度
(1V/1000rpm)
06- 定位完成指令
( 定位完成:5V
定位未完成:0V)
07- 速度前馈 (1V/1000rpm)
08-AI1 电压
09-AI2 电压
- 0
立即
生效
运行
设定
-
H04 54 AO2 偏置电压 -10000~10000 mV 5000
立即
生效
运行
设定
-
H04 55 AO2 倍率 -99.99 ~99.99 倍 1.00
立即
生效
运行
设定
-
H05 组 位置控制参数
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
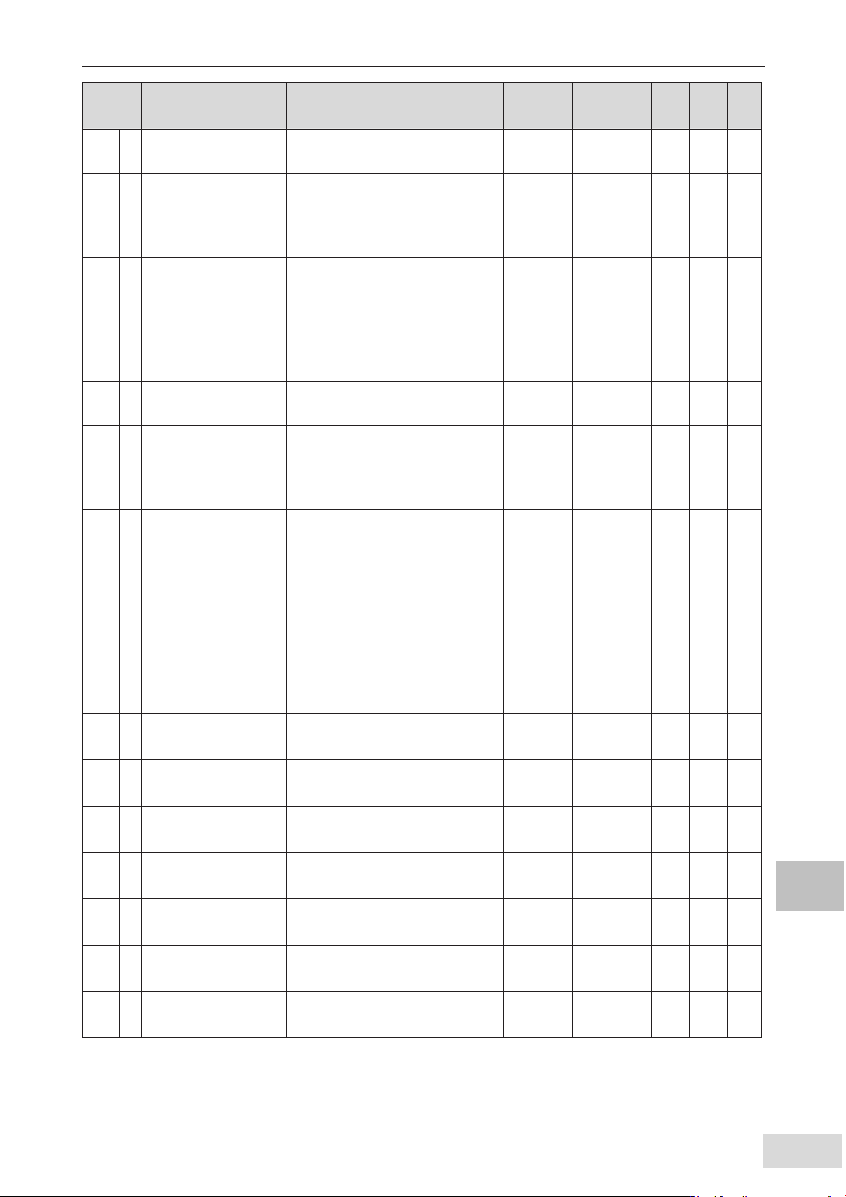
H05 00 位置指令来源
0- 脉冲指令
1- 步进量给定
2- 多段位置指令给定
- 0
立即
生效
停机
设定
P
H05 01
脉冲指令输入端子
选择
0- 低速
1- 高速
- 0
立即
生效
停机
设定
P
H05 02
电机每旋转 1 圈的
位置指令数
0 ~1048576 P/r 0
再次
通电
停机
设定
P
H05 04
一阶低通滤波时间
常数
0~6553.5 ms 0.0
立即
生效
停机
设定
P
H05 05 步进量 -9999 ~9999 指令单位 50
立即
生效
停机
设定
P
H05 06 平均值滤波时间常数 0.0~128.0 ms 0.0
立即
生效
停机
设定
P
H05 07 电子齿数比 1( 分子 ) 1~1073741824 - 1048576
立即
生效
运行
设定
P
H05 09 电子齿数比 1( 分母 ) 1~1073741824 - 10000
立即
生效
运行
设定
P
H05 11 电子齿数比 2( 分子 ) 1~1073741824 - 1048576
立即
生效
运行
设定
P
7
IS620P
系列伺服用户手册简易版 第
7
章 功能码参数一览表
- 155 -
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H05 13 电子齿数比 2( 分母 ) 1~1073741824 - 10000
立即
生效
运行
设定
P
H05 15 脉冲指令形态
0- 脉冲 + 方向,正逻辑
1- 脉冲 + 方向,负逻辑
2-A 相 +B 相正交脉冲,4 倍频
3-CW+CCW
- 0
再次
通电
停机
设定
P
H05 16 清除动作选择
0- 伺服使能 OFF 及发生故障时
清除位置偏差
1- 发生使能 OFF 及发生故障时
清除位置偏差脉冲
2- 发生使能 OFF 及通过 DI 输入
的 ClrPosErr 信号清除位置偏差
- 0
立即
生效
停机
设定
P
H05 17 编码器分频脉冲数 35 ~32767 P/r 2500
再次
通电
停机
设定
-
H05 19 速度前馈控制选择
0- 无速度前馈
1- 内部速度前馈
2- 将 AI1 用作速度前馈输入
3- 将 AI2 用作速度前馈输入
- 1
立即
生效
停机
设定
P
H05 20 定位完成输出条件
0- 位置偏差绝对值小于 H05-21
时输出
1- 位置偏差绝对值小于 H05-21
且滤波后的位置指令为 0 时输出
2- 位置偏差绝对值小于 H05-21
且滤波前的位置指令为 0 时输出
3- 位置偏差绝对值小于定位完成
/ 接近阈值,且位置指令滤波为
0 时输出,至少保持 H05-60 设
置的时间有效
- 0
立即
生效
运行
设定
P
H05 21 定位完成阈值 1 ~65535
编码器 /
指令单位
734
立即
生效
运行
设定
P
H05 22 定位接近阈值 1 ~65535
编码器 /
指令单位
65535
立即
生效
运行
设定
P
H05 23 中断定长使能
0- 禁止中断定长功能
1- 使用中断定长功能
- 0
再次
通电
停机
设定
P
H05 24 中断定长位移 0 ~1073741824 指令单位 10000
立即
生效
运行
设定
P
H05 26
中断定长恒速运行
速度
0~6000 rpm 200
立即
生效
运行
设定
P
H05 27 中断定长加减速时间 0~1000 ms 10
立即
生效
运行
设定
P
H05 29
定长锁定解除信号
使能
0- 不使能
1- 使能
- 1
立即
生效
运行
设定
P
7
第
7
章 功能码参数一览表
IS620P
系列伺服用户手册简易版
- 156 -
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
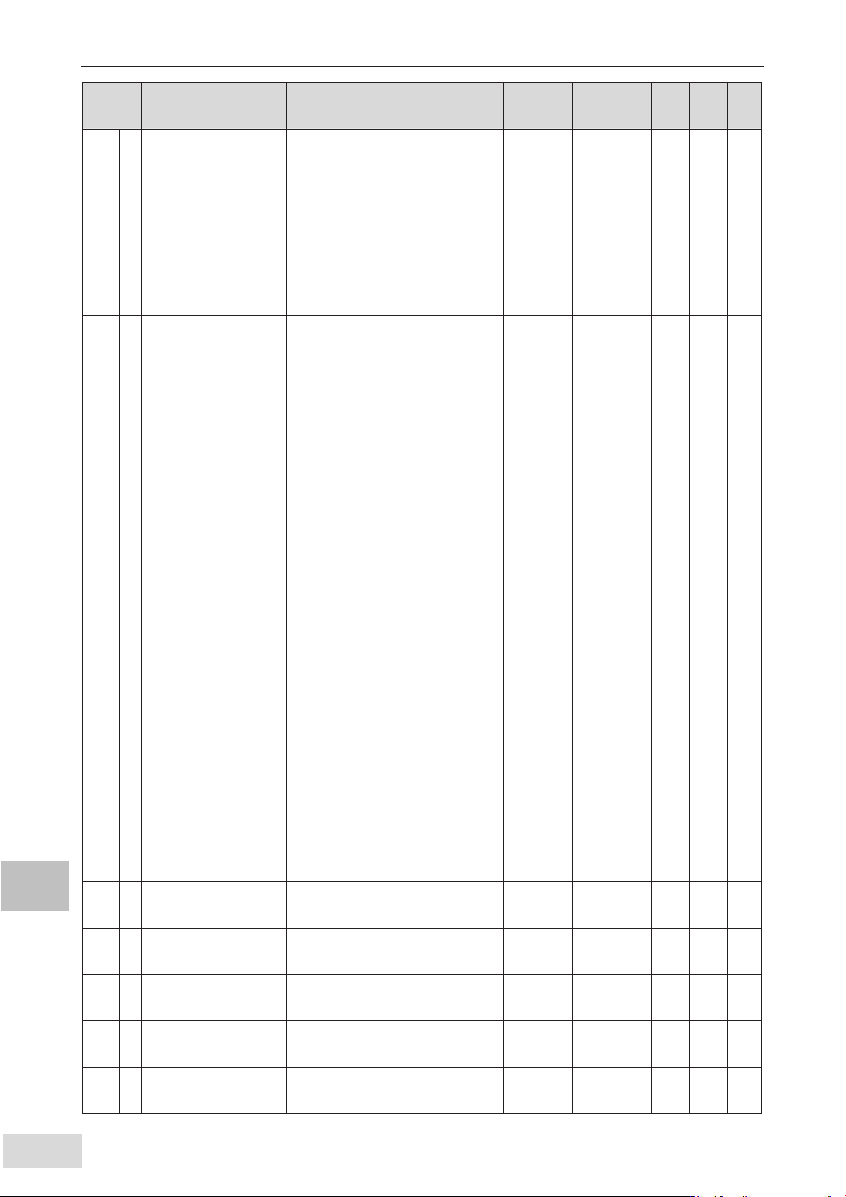
H05 30 原点复归使能控制
0- 关闭原点复归
1- 通过 DI 输入 HomingStart 信
号,使能原点复归功能
2- 通过 DI 输入 HomingStart 信
号,使能电气回零功能
3- 上电后立即启动原点复归
4- 立即进行原点复归
5- 启动电气回零命令
6- 以当前位置为原点
- 0
立即
生效
运行
设定
P
H05 31 原点复归模式
0- 正向回零,减速点、原点为
原点开关
1- 反向回零,减速点、原点为
原点开关
2- 正向回零,减速点、原点为
电机 Z 信号
3- 反向回零,减速点、原点为
电机 Z 信号
4- 正向回零,减速点为原点开
关,原点为电机 Z 信号
5- 反向回零,减速点为原点开
关,原点为电机 Z 信号
6- 正向回零,减速点、原点为
正向超程开关
7- 反向回零,减速点、原点为
反向超程开关
8- 正向回零,减速点为正向超
程开关,原点为电机 Z 信号
9- 反向回零,减速点为反向超
程开关,原点为电机 Z 信号
10- 正向回零,减速点、原点为
机械极限位置
11- 反向回零,减速点、原点为
机械极限位置
12- 正向回零,减速点为机械极
限位置,原点为电机 Z 信号
13- 反向回零,减速点为机械极
限位置,原点为电机 Z 信号
- 0
立即
生效
停机
设定
P
H05 32
高速搜索原点开关
信号的速度
0~3000 rpm 100
立即
生效
运行
设定
P
H05 33
低速搜索原点开关
信号的速度
0~1000 rpm 10
立即
生效
运行
设定
P
H05 34
搜索原点时的加减
速时间
0~1000 ms 1000
立即
生效
停机
设定
P
H05 35 限定查找原点的时间 0~65535 ms 10000
立即
生效
停机
设定
P
H05 36 机械原点偏移量 -1073741824 ~1073741824 指令单位 0
立即
生效
停机
设定
P