IS620P系列伺服用户手册.pdf - 第80页
4 第 4 章 运行模式与调试方法 IS620P 系列伺服用户手册简易版 - 80 - 电子齿轮比 B A = H05-07 H05-09 编码器分辨率 负载轴旋转一圈的位移量 ( 指令单位 ) m n × = 620P 最高支持 2 组电子齿轮比,可使用齿轮比切换功能 (FunIN.24) 完成齿轮比选择。 当 H05-02 ≠ 0 时: 电子齿轮比 B A = 编码器分辨率 H05-02 功能码 名称 设定范围 单位 出厂设定 生效…
4
IS620P
系列伺服用户手册简易版 第
4
章 运行模式与调试方法
- 79 -
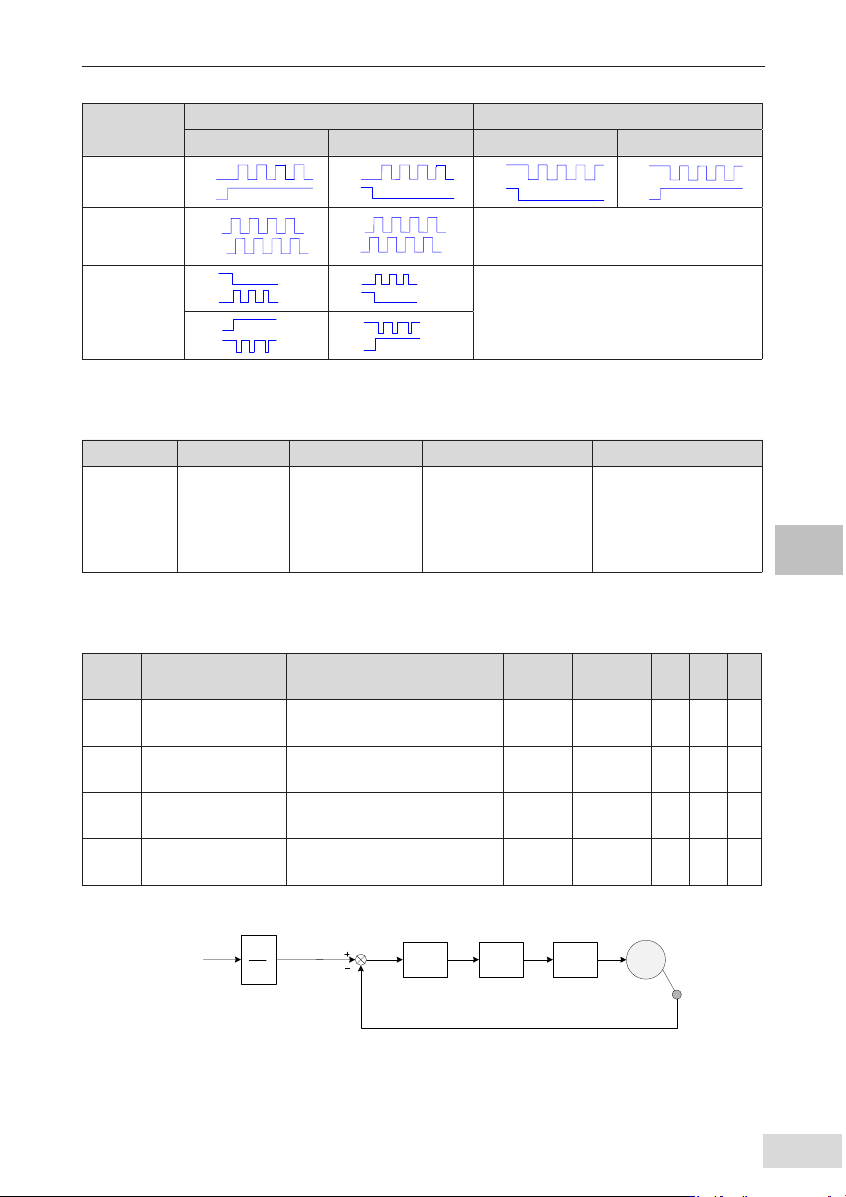
表 4-1 脉冲指令形式原理
脉冲指令形式
正逻辑 负逻辑
正转 反转 正转 反转
方向+脉冲
PULS
SIGN
PULS
SIGN
PULS
SIGN
PULS
SIGN
正交脉冲
(A相+B相)
PULS
SIGN
PULS
SIGN
CW+CCW
PULS
SIGN
PULS
SIGN
PULS
SIGN
PULS
SIGN
e) 脉冲禁止输入
通过设置 DI 功能 FunIN.13,禁止脉冲指令输入。
编码 名称 功能名 描述 备注
FunIN.13 INHIBIT 位置指令禁止
有效 - 禁止指令脉冲输入;
无效 - 允许指令脉冲输入。
原来为脉冲禁止功能。
现升级为位置指令禁止,
含内部和外部位置指令。
相应端子的逻辑选择,
必须设置为:电平有效。
2) 电子齿轮比设置
根据机械及上位机的实际情况设置电子齿轮比。
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H05-07 电子齿数比 1( 分子 ) 1~1073741824 1 1048576
立即
生效
运行
设定
P
H05-09 电子齿数比 1( 分母 ) 1~1073741824 1 10000
立即
生效
运行
设定
P
H05-11 电子齿数比 2( 分子 ) 1~1073741824 1 1048576
立即
生效
运行
设定
P
H05-13 电子齿数比 2( 分母 ) 1~1073741824 1 10000
立即
生效
运行
设定
P
电子齿轮比的作用原理如下图所示:
位置环
B
A
位置指令
(指令单位)
PMSM
PG
速度环
电流环
位置反馈(脉冲数)
位置指令
(脉冲数)
图 4-3 电子齿轮比作用原理图
当 H05-02=0 时,电机与负载通过减速齿轮连接,假设电机轴与负载机械侧的减速比为 n/m( 电机
轴旋转 m 圈,负载轴旋转 n 圈 ),电子齿轮比的计算公式如下:
4
第
4
章
运行模式与调试方法
IS620P
系列伺服用户手册简易版
- 80 -
电子齿轮比
B
A
=
H05-07
H05-09
编码器分辨率
负载轴旋转一圈的位移量(指令单位)
m
n
×
=
620P 最高支持 2 组电子齿轮比,可使用齿轮比切换功能 (FunIN.24) 完成齿轮比选择。
当 H05-02 ≠ 0 时:
电子齿轮比
B
A
=
编码器分辨率
H05-02
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H05-02
电机每旋转 1 圈的
位置指令数
0 ~1048576 P/r 0
再次
通电
停机
设定
P
此时齿轮比与 H05-07、H05-09、H05-11、H05-13 无关,齿轮比切换功能无效。
3) 位置指令滤波设置
位置指令平滑功能是指对输入的位置指令进行滤波,使伺服电机的旋转更平滑。该功能在以下场
合效果明显:
● 上位装置输出脉冲指令未经过加 / 减速处理,且加 / 减速度很大;
● 指令脉冲频率过低;
● 电子齿轮比为 10 倍以上。
注:
■ 该功能对位移量 ( 位置指令总数 ) 没有影响。
位置指令平滑功能相关参数的设定如下所示。
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
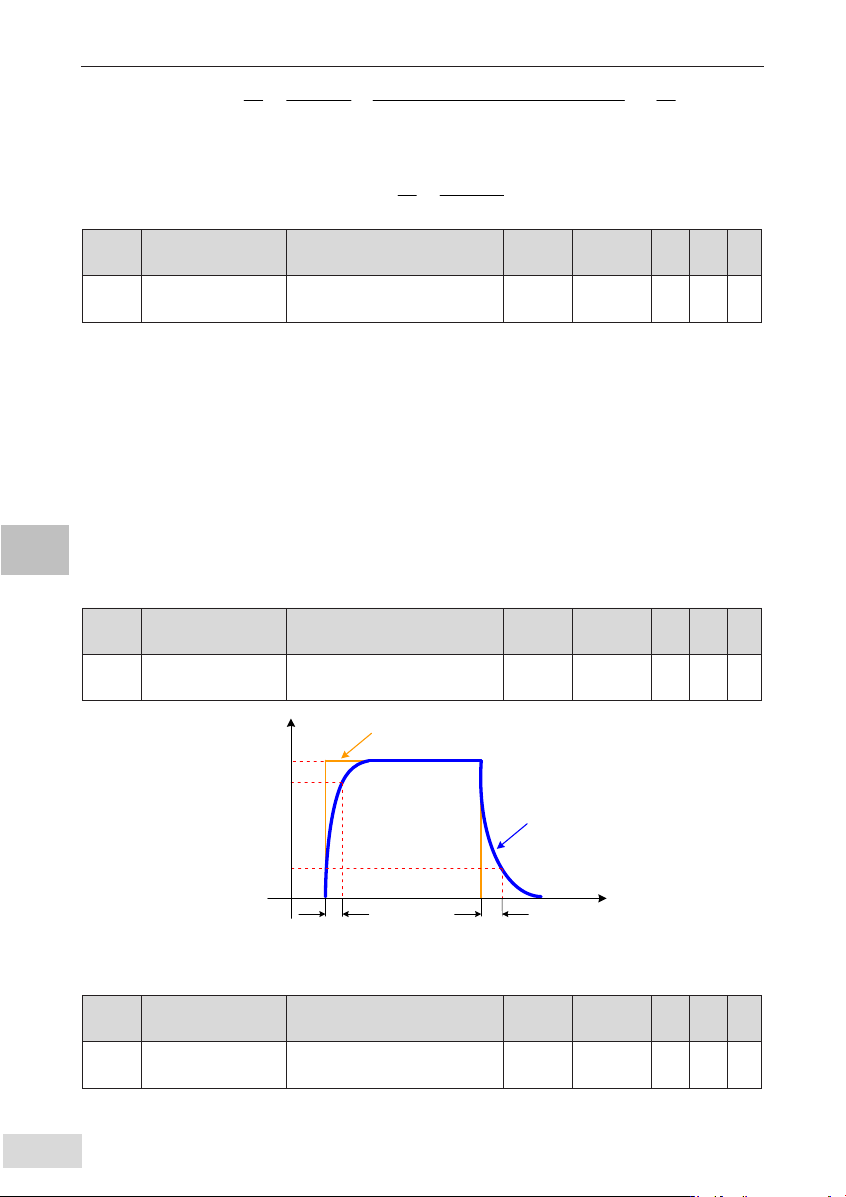
H05-04
一阶低通滤波时间
常数
0.0~6553.5 ms 0.0
立即
生效
停机
设定
P
位置指令
时间
低通滤波时间
P
0.632
0.368
滤波前指令
滤波后指令
低通滤波时间
05-04
H
Px
Px
T
05-04
H
图 4-4 一阶滤波示例图
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H05-06 平均值滤波时间常数 0.0~128.0 ms 0.0
立即
生效
停机
设定
P
注:
■ H0506=0 时,平均值滤波器无效。
4
IS620P
系列伺服用户手册简易版 第
4
章 运行模式与调试方法
- 81 -
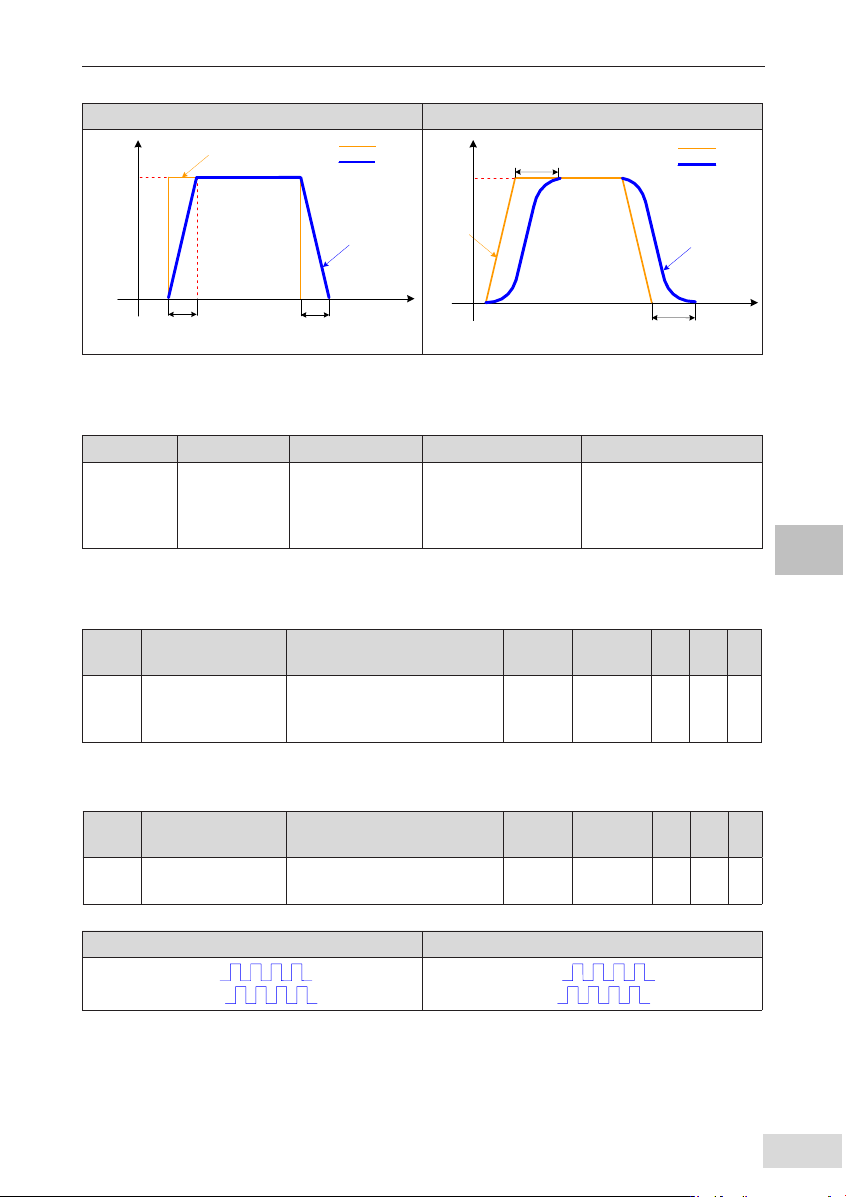
表 4-2 平均滤波器对两种不同位置指令的滤波效果对比
矩形位置指令 梯形位置指令
位置指令
时间
P
滤波前
滤波后
T
平均滤波时间
05-06
H
平均滤波时间
05-06H
滤波前
滤波后
位置指令
时间
P
滤波前
滤波后
T
平均滤波时间
05-06
H
平均滤波时间
05-06H
滤波前
滤波后
4)位置偏差清除功能
通过设置 DI 功能 FunIN.35,可使用 DI 控制是否对位置偏差清零。
编码 名称 功能名 描述 备注
FunIN.35 ClrPosErr
清除位置偏差
( 沿有效功能 )
有效 - 位置偏差清零;
无效 - 位置偏差不清零。
相应端子的逻辑选择,
建议设置为:边沿有效。
该 DI 功能建议配置到 DI8
或 DI9 端子上。
5)分频输出功能
伺服脉冲输出来源由 H05-38 选择,脉冲指令同步输出功能一般用于同步控制场合。
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H05-38
伺服脉冲输出来源
选择
0- 编码器分频输出
1- 脉冲指令同步输出
2- 分频和同步输出禁止
- 0
再次
通电
停机
设定
P
通过设置 H05-17,伺服驱动器将编码器反馈的脉冲数按照设定值分频后通过分频输出端口输出,
H05-17 设定值对应 PAO/PBO 每圈输出的脉冲数 (4 倍频前 )。
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H05-17 编码器分频脉冲数 35~32767 P/r 2500
再次
通电
停机
设定
-
表 4-3 输出相位形态
正转时 (A 相超前 B 相 90° ) 反转时 (B 相超前 A 相 90° )
PAO
PBO
PAO
PBO
输出脉冲反馈相位形态可通过 H02-03 调整。