SM471_Introduction(Chi_Ver1).pdf - 第39页
1-5 设备的特点及部品规格 1.2.2. 可适用部品的规格 1.2.2.1. Flying Vision 识别系统 以下表格是有关本设备中适用的 部品规格的规定, 主要适用于一般的部品。 表 1.1 可适用部品的规格 (Vision 识别系统 ) 区 分 Component s FOV 24mm Mega Pixel Camera Chips 0402 ~ □ 14mm IC, Connector □ 14mm 以下 , Lead P…
1-4
Samsung Component Placer SM471 Introduction
1.2. 可适用部品
1.2.1. 头部及图象识别系统的构成
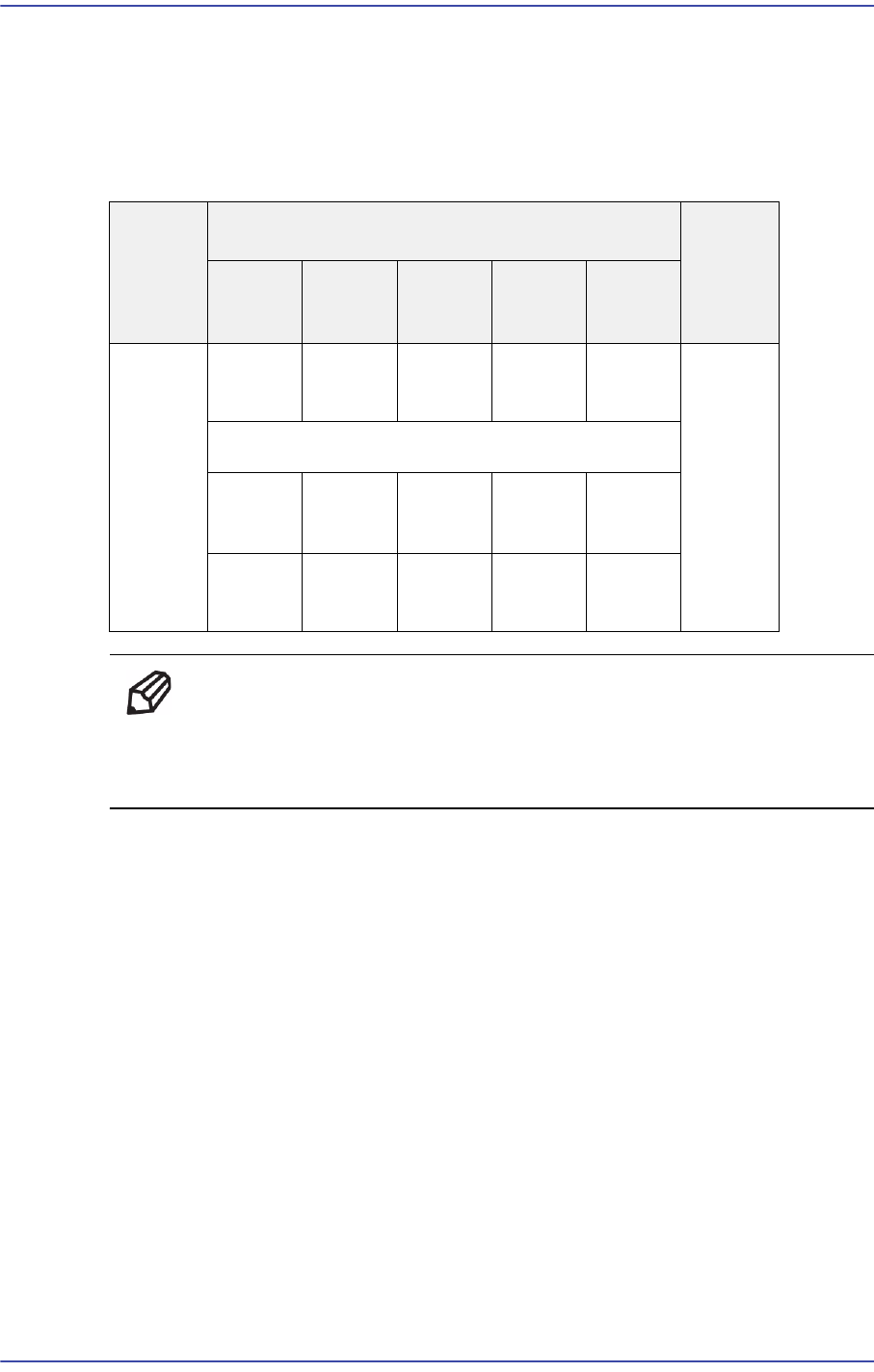
与需要贴装的部品相关的头部及图象识别系统的构成如下表
表
1.1 Head
及
Vision
识别系统的构成
备 注 悬臂1(正面)与悬臂 2(背面 ) 各自由10个贴装头与5个视觉相机
(FOV 24mm)构成。一个视觉相机负责两个贴装头。详细内容请
参阅“1.2.2. 可适用的元件规格”。
区 分
Gantry1 Head 结 构
Vision
System
Head 1
Head 2
Head 4
Head 5
Head 6
Head 7
Head 7
Head 8
Head 9
Head 10
SM471
24mm
Vision
24mm
Vision
24mm
Vision
24mm
Vision
24mm
Vision
FOV 24 /
Mega
Pixel
Gantry2 Head 结 构
Head 11
Head 12
Head 13
Head 14
Head 15
Head 16
Head 17
Head 18
Head 19
Head 20
24mm
Vision
24mm
Vision
24mm
Vision
24mm
Vision
24mm
Vision
1-5
设备的特点及部品规格
1.2.2. 可适用部品的规格
1.2.2.1. Flying Vision识别系统
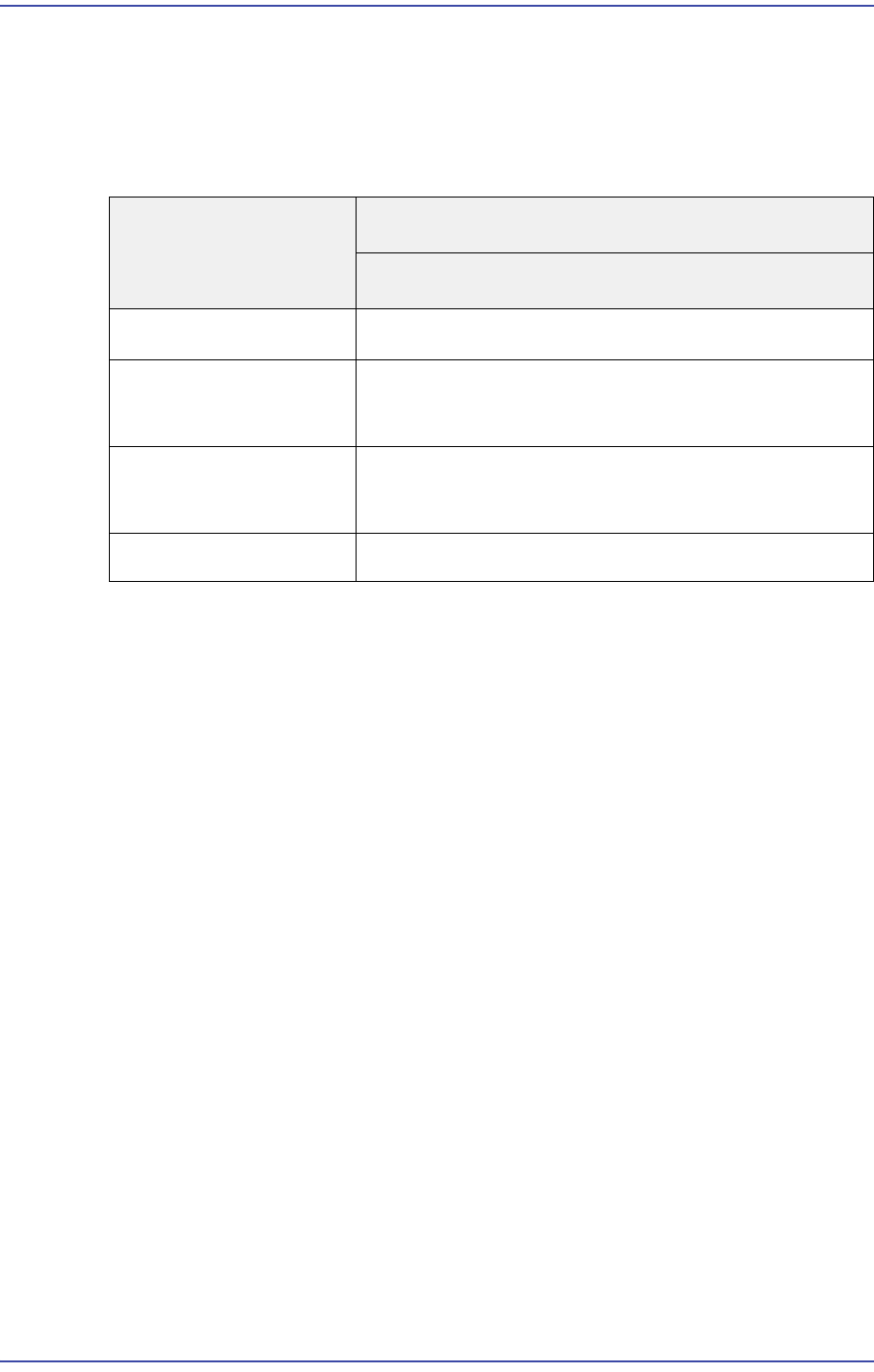
以下表格是有关本设备中适用的部品规格的规定,主要适用于一般的部品。
表
1.1
可适用部品的规格
(Vision
识别系统
)
区 分
Components
FOV 24mm Mega Pixel Camera
Chips
0402 ~ □14mm
IC, Connector
□14mm 以下,
Lead Pitch : 0.5mm 以上
BGA, CSP
□14mm 以下, ,
Ball Pitch : 0.5mm 以上
Maximum Height 12mm
1-6
Samsung Component Placer SM471 Introduction
1.2.3. 贴装精度
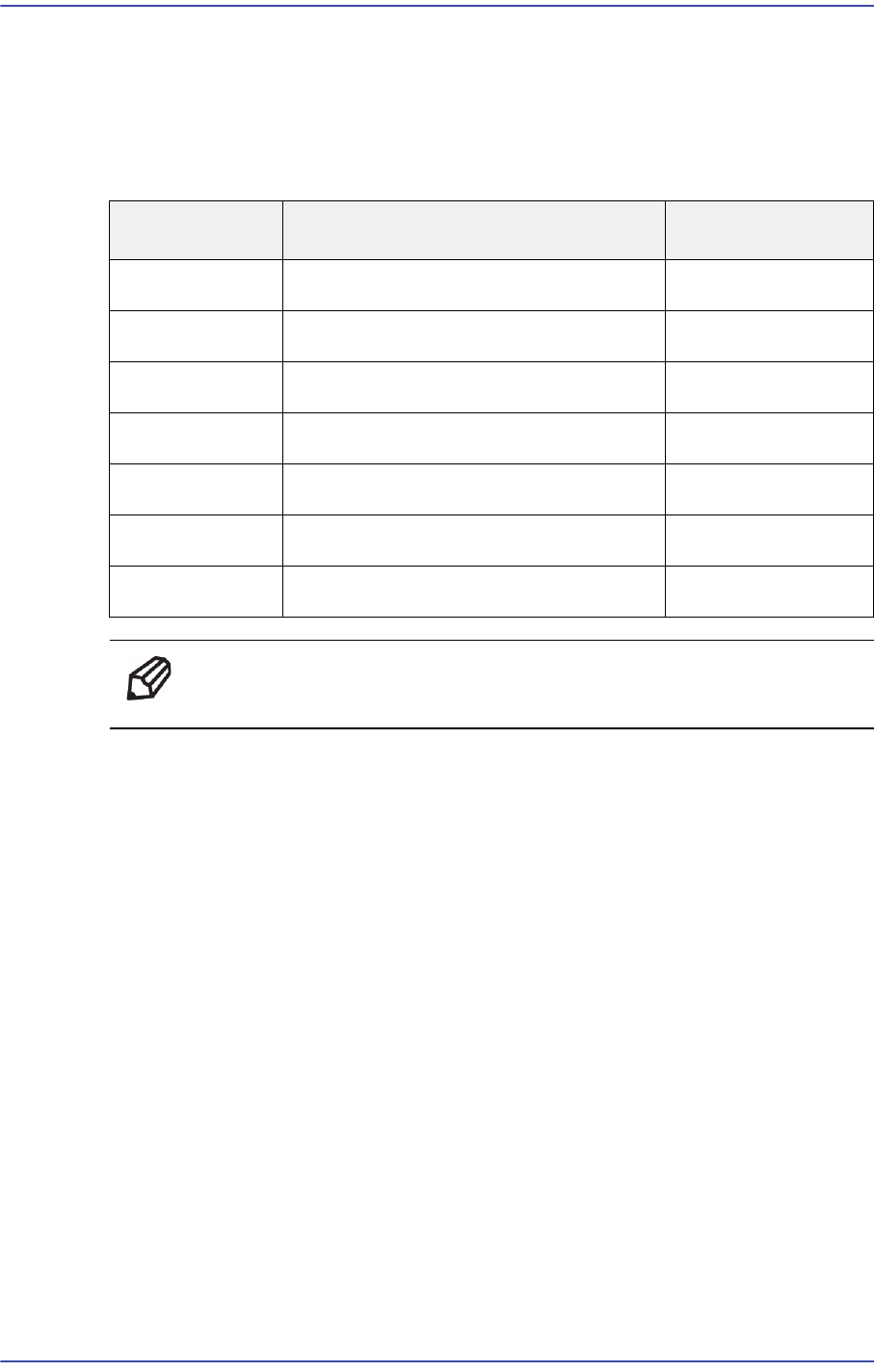
下图关于本设备适用可能的部件分类型规定了贴装程度,作为一般部件的贴装条件
本公司的设备满足此条件。因用在部件识别的摄象机规格的选项构成不同,贴装程
度也不同。
表
1.1
贴装精度
备 注 θ轴和R 轴同样意味着头部的旋转轴。
1.2.4. 贴装速度
以下叙述的内容为有关各部件贴装速度的数据。实际贴装速度可因PCB大小和吸嘴
(Nozzle)交替次数等变化。
1.2.4.1. 一般
速度
规定最高的要求。
贴装部品: 1608 chip
时间测定
依据IPC 标准。
区 分 Specification (XY: mm, θ: °) 备 注
Chip 0402
XY : ±0.05 , θ : ±5.0 , Cpk≥1.0
FOV24mm Mega
Chip 0603
XY : ±0.08 , θ : ±5.0 , Cpk≥1.0
Chip 1005
XY : ±0.10 , θ : ±5.0 , Cpk≥1.0
Lead IC 0.4 P
XY : ±0.05 , θ : ±0.2 , Cpk≥1.0
FOV24mm Mega
Lead IC 0.5 P
XY : ±0.06 , θ : ±0.3 , Cpk≥1.0
BGA 0.5 P
XY : ±0.06 , θ : ±0.25 , Cpk≥1.0
FOV24mm Mega
BGA 0.65 P
XY : ±0.10 , θ : ±0.50 , Cpk≥1.0