MOTOMAN-MPL 系列.pdf
MOTOMAN - MPL 系列 YASKAWA ■ 控制柜 DX 100 标准规格 ■ 示教编程器规格 规 格 MOTOMAN - MPL 系列 169 : 幅 ) > < 314.5 ( 深 ) x 50 ( 高 ) mm 寸 防 尘 结 构 尺 MPL 80 用 : 毛 重 0.990 kg 425 ( 宽 ) x 45 ( X 深 ) x 1200 ( 高 ) mm ( 可对应外部 2 轴 ) , 100 kg 以下…
MOTOMAN
-
MPL
系列
YASKAWA
■
控制柜
DX
100
标准规格
■
示教编程器规格
规
格
MOTOMAN
-
MPL
系列
169
:
幅
)
>
<
314.5
(
深
)
x
50
(
高
)
mm
寸
防尘结构
尺
MPL
80
用
:
毛
重
0.990
kg
425
(
宽
)
x
45
(
X
深
)
x
1200
(
高
)
mm
(
可对应外部
2
轴
)
,
100
kg
以下
材
质
强化塑料
选择键
,
轴操作键
C
8
轴
)
,
数值
/
应用键
,
带有钥
匙的切换模式键
(
示教模式
,
再现模式
,
远程模
式
)
,
非常停止按钮
,
使能按钮
,
小型记忆卡
I
/
F
装备
(
小型记忆卡为选配
,
USB
端口
(
1
端口
)
装备
MPL
100
,
MPL
160
,
MPL
300
,
MPL
500
用
:
425
(
宽
)
x
450
:
深
)
x
1200
(
高
)
mm
(
可对应外部
2
轴
)
,
150
kg
以下
尺 寸
*
,
操 作 机 器
毛 重
MPL
800
用
:
825
(
宽
)
x
45
a
深
)
x
1200
(
高
)
mm
640
X
480
象色素
LCD
,
触摸屏
(
汉字
,
平假名
,
片假名
,
英数字
,
其他
)
显示屏
(
可对应外部
2
轴
)
,
200
kg
以
K
冷 却 方 式
间接冷却
保 护 等 级
IP
6 5
通电时
:
0
+
45
°
C
,
保管时
:
-
10
+
60
°
C
标准
:
8
m
,
最大
(
选配
)
:
36
m
周 围 温 度
电 缆 长 度
最人
90
%
:
+
结霜
)
相 对 湿 度
(
相
AC
200
V
/
220
V
(
+
10
%
,
_
15
%
)
60
Hz
(
±
2
%
>
国内规格
)
三相
AC
200
V
(
+
10
%
,
15
%
)
50
Hz
(
±
2
%
)
国内规格
)
电 源 规 格
Dfl
(
接地电阻
100
Q
以下专用接地
)
接
地
专用信号
:
输入
23
,
输出
5
通用信号
:
输入
40
,
输出
40
最大输入输出信号
(
选配
)
:
输入
2048
,
输出
2048
入 输 出 信 号
编码器顺序
位置控制方式
JOB
:
200000
程序点
,
10000
机器人命令
CIO
梯形图
:
20000
程序点
记 忆 容 量
PCI
:
2
插 槽
(
主
CPU
)
,
1
插槽
(
伺服
CPU
)
其 它
,
传 感
器基板专用
1
插枬製备
增 加 插 槽
LAN
(
上位连接
)
1
个
(
10
BASE
-
T
/
100
BASE
-
TX
)
I
/
F
编号
RS
-
232
C
:
1
个
伺服软件
控 制 方 式
孟塞尔色系
5
Y
7
/
1
相 当
喷 漆 色
氺
:
不包含控制器外侧安装的工具尺寸
•
使用前诮熟读说明书及其附珙文件等
,
IF
.
确使川
。
•
此
B
录记敕的产品为一般产业用机器人吳托受
(
MOTOMAN
)
。
如
M
0
T
0
MAN
发生的故陣及错误操作直接威胁到人生安全
,
或被适用于危害人体安全的用途时洁到我司昔业厅窗口洵问
,
我们将作出改善
。
•
为了使您更容易理解
,
本资料内所使用的照片是除去法定安全栏后摄影的
。
另外
.
图解等都为意向图
。
安全注意
A
安川電機
(
中国
)
有限公司机器人事业部
上海机器人中心
上海市闸北区万荣路
700
号
D
2
200072
TEL
上海市黄浦区湖滨路
222
号企业天地
1
号楼
22
F
200021
TEL
021
-
53852200
FAX
021
-
53853299
021
-
36567900
FAX
021
-
56720075
广州机器人中心
安川電機
(
中国
)
有限公司广州分公司
广东省广州市荔湾区芳村大道东
200
号
1850
创意园
51
栋
510380
TEL
020
-
81293327
成都机器人中心
四川省成都市高新西区西芯大道
3
号国腾科技园区内
5
栋
1
层
104
室
611731
TEL
广东省广州市天河区体育东路
138
号金利来大厦
1108
室
510620
TEL
020
-
38780005
FAX
020
-
38780565
安川電機
(
中国
)
有限公司成都分公司
028
-
86719370
FAX
028
-
86719371
四川省成都市高新西区西芯大道
3
号国腾科技园区内
5
栋
1
层
104
室
611731
TEL
028
-
86719370
FAX
028
-
86719371
安川
(
中国
)
机器人有限公司
江苏省常州市武进高新区武进西大道
59
号
510620
TEL
0519
-
86220612
FAX
0519
-
86220611
如果产品的最终使用者足军方
,
并将本产品用于兵器制造使用吋
,
将被视为
[
外国
外汇及外国贸易法
]
所规定的出口限制对象
,
波出
U
时谐详细
IL
慎重的帘杳必要的
出口手续
。
闪产品改良原因而发生功率
、
规格
、
尺寸等一部分的更改时
,
恕不另行通知
。
关于该资料的询问谙联系代理店或
h
记哲他部门
YASKAWA
安川電機
(
中国
)
有限公司
资料编号
:
A
1210
-
12
(
21
2016
年
2
月作成
JQA
-
0813
JQA

充实的
LINE
UP
!
构建最适合码垛的机器人系统
2
^
卿
高生产性
省空间
追求最适合码垛用途的性能
、
构造
、
专用工具
,
提升生产力
。
搭载高性能的控制柜及选配功能
,
提升设备的省空间性
。
选配
安全栅的最小化
*
4
机械臂
码垛专用软件
MOTOPAL
控制柜
DX
100
小型样式的控制柜
(
宽
425
mm
*
2
)
可最大化的减少
42
%
*
3
的安装面积
附件安装
BOX
可最多控制
72
轴
(
机器人
8
台
)
通过由
2
重化
CPU
构成的
[
机械安全单元
]
来限制机器人的动作
范围
。
所以能够把安全栅的范围设定为工作必要最小范围
。
支持操作示教编程器进行码垛作业的软件
。
安装时间短
,
提
升作业效率
。
高速
、
大动作范围
,
提髙生产力
。
通过对高速低惯性伺服马达的应用和高端的控制技术
,
实现世界最快速度
,
从而缩短节拍时间
。
并且使用适合码垛的长臂型
L
轴和
U
轴
,
实现了最大级
别的码垛范围
。
机械臂内的中空构造
,
避免了电缆间的干涉
T
轴
(
手臂轴
)
的中空构造
,
可内藏电缆线
。
实现了电缆
、
硬件与周边设备的零干涉
。
參码垛程序自动生成
。
•
方便确认码垛状态
。
•
方便选择作业或者切换作业
。
參因为能够把安全栅的范围设定为工作必要最小范围
,
所以
可以设置生产设备最小化
。
參
Set
工程的机器人
,
还可以废除区域极限开关
。
*
2
:
除
MOTOMAN
-
MPL
800
以外
氺
3
:
与本公司原机型进行比较
氺
4
:
对应的机型
,
请咨询相关营业部门
。
mm
电缆内藏
最小化
函
T
轴中空
1
」
圆
vS
简单的维护
最适合码垛的机器人产品线
MOTOMAN
追求在监控
,
故障检查
,
结构等方面的改善
,
以便缩短维护时间与发生故障时的
修复时间
。
MOTOMAN
-
MPL
80
MPL
100
MPL
160
MPL
300
MPL
500
MPL
800
故障检查
缩短零件的更换时间
减速机使用寿命诊断
实现了缩短控制柜的零件更换时间与
故障发生后的修复时间
。
(
交换时间
10
分一
8
分钟
:
减少
20
%
)
用单元方式交换编码器后
,
用普通工
具也能工作
,
所以可以缩短工作时间
。
除此之外
,
我们灵活运
)
目了原点归位
功能
(
选配
)
在短时间内正确的找
M
交换马达
、
编码器失去的原点位置
。
监视马达转矩
,
诊断减速机的状况
。
/
1
:
减速机快到使用期限前发出警报信
号
,
提醒您需要更换
,
防范于未然
。
制作用于专为测量各轴转矩的指令
,
形成转矩数据库
(
参照下图
)
将转矩和转矩数据
库进行比较
,
判断
是否劣化
。
当发生警报时
,
示教器上会显示发生
的内容
,
原因
,
解决方法
。
在发生故
障时提供解决及应对
。
■
曜
»
«
s
»
-
腾
服
*
*
r
I
发生原因
对策
(
针对故障检查
)
2
3
MOTOMAN
-
MPL
80
MOTOMAN
-
MPLIOO
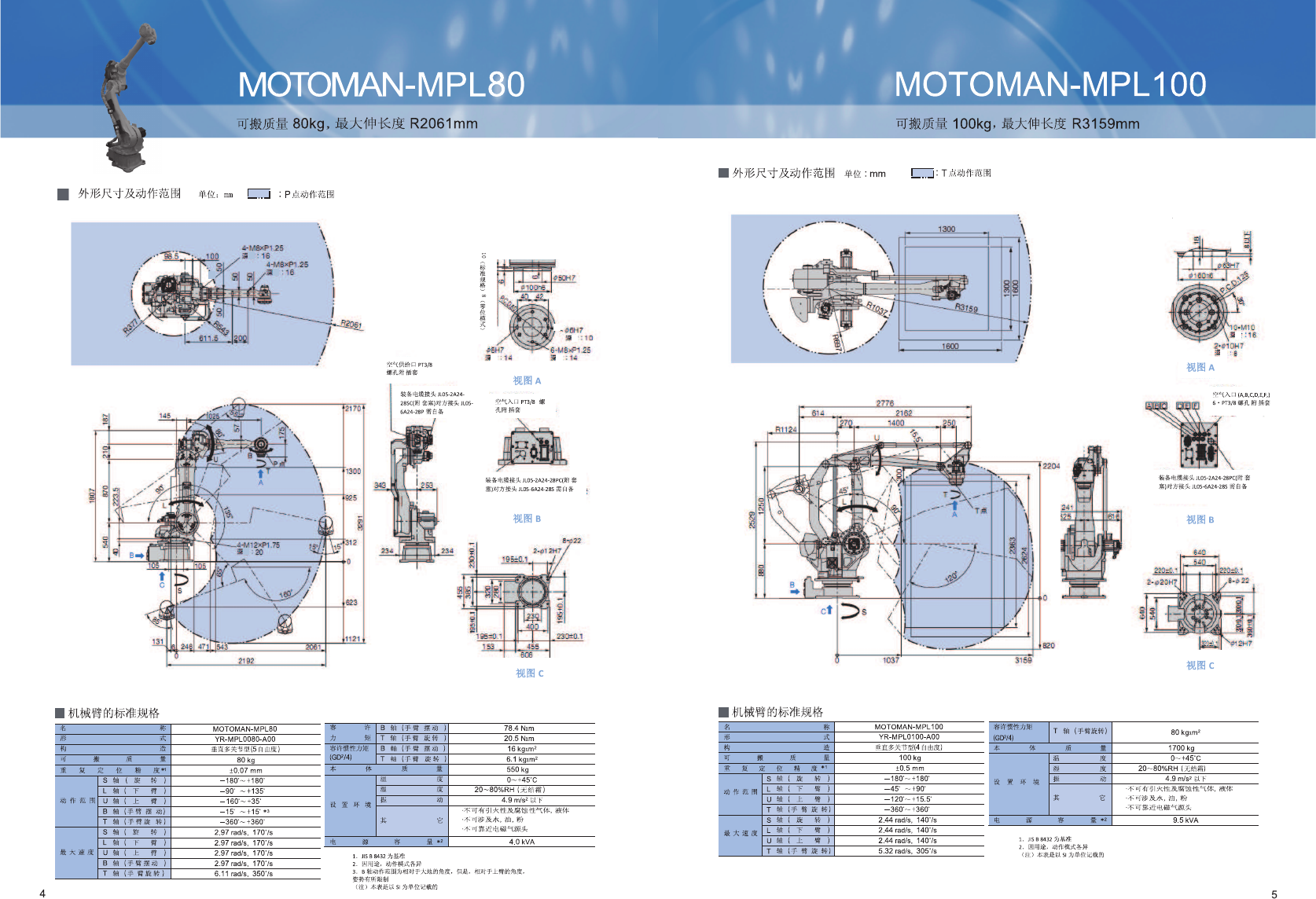
可搬质量
80
kg
,
最大伸长度
R
2061
可搬质量
100
kg
,
最大伸长度
R
3159
mm
mm
I
外形尺寸及动作范围单位
:
mm
di
:
T
点动作范围
■
外 形 尺 寸 及 动 作 范 围 单 位
di
:
P
点动作范围
:
mm
1300
Z
3
4
-
M
8
XP
125
深
:
16
•
*
^
5
^
-
.
^
1 0 0
夕去
H
7
4
-
r
,
i
深
8
XP
1
.
25
标
16
准
160
h
6
s
/
§§
^
I
0 0
h
6
ST
:
40
,
.
42
.
>
<
u
『
•
s
1
Xx
10
-
M
10
/
\
i
5
:
16
2
-
^
1
OH
7
濟
:
0
9
'
T
7
,
o
6
-
M
8
xP
1.25
M
:
14
611.5
OBH
7
M
:
14
空气供给口
PT
3
/
8
螺孔附插套
视图
A
视图
A
装备电缆接头儿
05
-
2
A
24
-
28
SC
(
附套塞
)
对方接头儿
05
-
6
A
24
-
28
P
需
S
备
空气入口
(
A
,
B
,
C
,
D
,
E
,
F
,
}
6
-
PT
3
/
8
螺孔附插套
空气入口
PT
3
/
8
螺
孔附插套
2776
m
2170
2162
145
N
-
/
se
|
3
B
2204
1300
装备电缆接头儿
05
-
2
A
24
-
28
PC
(
附套
塞
}
对方接头儿
05
-
6
A
24
-
28
S
需白备
装备电缆接头儿
05
-
2
A
24
-
28
PC
(
附套
塞
)
对方接头
JL
05
-
6
A
24
-
28
S
需
S
备
A
925
§
1
视图
B
视图
B
8
-
022
312
4
-
M
12
XP
S
:
20
1
75
2
-
^
12
H
7
640
B
畤
I
9
fc
0.1
0
540
105
-
0
,
1
^
223
=
0.1
223
r
0
/
8
-
0
22
2
-
O
20
H
7
S
卜
。
+
i
623
2
S
3
9
^
00
2
230
±
0.1
195
=
0.1
1121
131
>
^
543
d
12
H
7
820
248
471
153
455
2061
606
0
1037
3159
1192
视图
C
视图
C
■
机械臂的标准规格
■
机械臂的标准规格
名
称
MOTOMAN
-
MPLIOO
容许惯性力矩
(
GD
2
/
4
)
许
B
轴
(
手 臂 摆 动
)
78.4
Nxm
名
称
MOTOMAN
-
MPL
80
T
轴
(
手臂旋转
)
80
kgxm
2
YR
-
MPL
0100
-
A
00
形
式
T
轴
(
手 臂 旋 转
)
力
矩
20.5
Nxm
形
YR
-
MPL
0080
-
A
00
乖直多关节型
(
4
自由度
)
构
造
容许惯性力矩
(
GD
2
/
4
)
B
軸
(
手 臂 摆 动
)
本
体
质
量
1700
kg
16
kgxm
2
造
垂直多关节型
(
50
由度
)
质
可
搬
量
100
kg
温
度
0
+
45
°
C
T
軸
(
手 臂 旋 转
)
6.1
kgxm
2
可
搬
量
80
kg
±
0.5
mm
20
80
%
RH
(
无结霜
)
本
质
重 复 定 位 精 度
度
体
量
湿
550
kg
重 复 定
位 精 度
*
1
土
0.07
mm
S
轴
(
旋
转
)
L
轴
(
下
~
~
—
180
'
+
180
'
4.9
m
/
s
2
以下
度
振
动
温
0
+
45
°
C
S
轴
(
旋 转
)
—
180
#
+
180
°
设 置 环 境
-
451
+
90
。
不可有引火性及腐蚀性气体
,
液体
不可涉及水
,
油
,
粉
不可靠近电磁气源头
度
湿
20
80
%
RH
(
无结霜
)
L
轴
(
下 臂
)
-
90
。
+
135
°
动 作 范 围
其
它
U
轴
(
上
臂
)
-
120
^
+
15.5
振
动
U
轴
(
上 臂
)
4.9
m
/
s
2
以下
动 作 范 围
-
160
,
+
35
°
设 置 环 境
T
轴
(
手 臂 旋 转
)
—
360
’
+
36
CT
不可有引火性及腐蚀性气体
,
液体
不可涉及水
,
油
,
粉
不可靠近电磁气源头
B
轴
(
手 臂 摆 动
)
-
15
。
+
15
。
*
3
S
轴
(
旋
转
)
L
轴
(
下
w
~
y
U
轴
(
上
~
~
^
"
1
2.44
rad
/
s
,
1407
s
电
源
容
莆
*
2
9.5
kVA
其
它
T
轴
(
手 臂 旋 转
)
s
轴
(
旋
~~
-
360
°
+
36
(
X
2.44
rad
/
s
,
1407
s
2.97
rad
/
s
,
1707
s
最 大 速 度
1
.
JISB
8432
为基准
2
.
因用途
,
动作模式各异
(
注
)
本表是以
SI
为单位记载的
2.44
rad
/
s
,
1407
s
L
轴
(
下
臂
)
电
源
量
*
2
4.0
kVA
2.97
rad
/
s
,
1707
s
T
轴
(
手 臂 旋 转
)
5.32
rad
/
s
,
3057
s
敁 大 速 度
U
轴
(
上
臂
)
2.97
rad
/
s
,
1707
s
1
.
JISB
8432
为基准
2
.
因用途
,
动作模式各异
3
.
B
轴动作范围为相对于大地的角度
,
但是
,
相对于上臂的角度
,
姿势有所限制
(
注
)
本表是以
SI
为单位记载的
B
轴
(
手 臂 摆 动
)
2.97
rad
/
s
,
1707
s
T
轴
(
手 锊 旋 转
)
6.11
rad
/
s
,
3507
s
4
5