00191915-01.pdf - 第218页
6 Funzioni Vision Istruzioni per l’uso SIPLACE 80S-20/F4 6.2 Visionsystem CS Versione software SR.406.xx Edizione 02/2000 IT 216 6.2 V isionsystem CS Il visions ystem CS rileva l a posiz ione esat ta del circ uito stampa…
Istruzioni per l’uso SIPLACE 80S-20/F4 6 Funzioni Vision
Versione software SR.406.xx Edizione 02/2000 IT 6.1 I sistemi Vision del dispositivo automatico
215
6
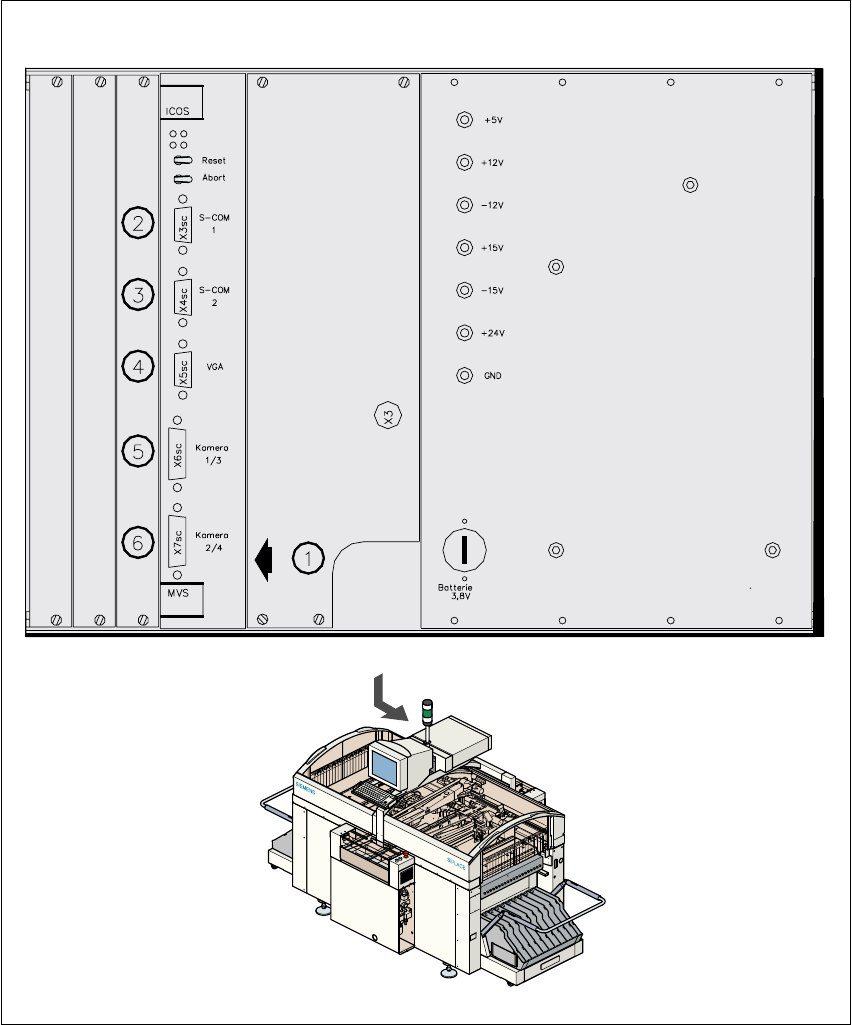
Fig. 6.1 - 6 Unità d’analisi Vision
6
6 Funzioni Vision Istruzioni per l’uso SIPLACE 80S-20/F4
6.2 Visionsystem CS Versione software SR.406.xx Edizione 02/2000 IT
216
6.2 Visionsystem CS
Il visionsystem CS rileva la posizione esatta del circuito stampato misurando le fiducial e deter-
mina lo spostamento in direzione X e Y, l’angolo di torsione relativo alla direzione di trasporto CS
e la deformazione di taglio del CS. Il Visionsystem CS raccoglie e valuta anche le marcature degli
scarti (ink dots). 6
6.2.1 Descrizione del sistema
Il Visionsystem CS per il riconoscimento della posizione dei circuiti stampati è formato dal sistema
ottico per il riconoscimento della posizione del circuito stampato e dalla unità di analisi Vision 6
Sistema ottico per il riconoscimento della posizione del circuito stampato 6
Ogni portale possiede un sistema proprio per il riconoscimento di posizione dei CS (vedi la figura
6.1 - 5, pagina 212). 6
Unità di analisi Vision 6
In ogni dispositivo automatico è collocata nell’elemento ad innesto di comando un’unità d’analisi
per il riconoscimento dei circuiti stampati e dei componenti (vedi Fig. 6.1 - 6, pagina 215). 6
La videocamera CCD (videocamera SONY XC75) con sistema ottico integrato di immagine e di
illuminazione forma il sistema ottico di riconoscimento di posizione dei CS Il campo visivo del mo-
dulo CS è di 5,7 mm x 5,7 mm. All’interno della misurazione dei campi visivi può essere libera-
mente programmato un campo di ricerca in lunghezza ed altezza. Il sistema ottico di
rappresentazione è un sistema di misurazione speciale che compensa nel modo più ampio pos-
sibile gli errori di misurazione causati dalle convessità del circuito stampato. L’illuminazione si ac-
cende solo durante l’accettazione delle fiducial di scheda. 6
L’unità di analisi Vision (MVS) è un sistema ad una piastra conforme alla normativa VME. L’hard-
ware è composto da 6
– una scheda madre MVS con processore Vision ed allacciamenti per le interfacce
– interfaccia della videocamera MVS per massimo quattro videocamere CCD.
Scheda madre MVS con processore Vision e collegamenti per le interfacce 6
Nella parte posteriore della piastra VME si trovano i due collegamenti ad innesto per il bus VME.6
Sul lato frontale della piastra VME si trovano i connettori di allacciamento per 6
– lo schermo (modo VGA, connettore SUBD a 15 poli)
– l’interfaccia ad elevata velocità (HS
3
L), connettore SUBD a 9 poli
– massimo 4 entrate della videocamera (2 connettori SUBD a 15 poli)
Istruzioni per l’uso SIPLACE 80S-20/F4 6 Funzioni Vision
Versione software SR.406.xx Edizione 02/2000 IT 6.2 Visionsystem CS
217
– due interfacce seriali (RS232 per COM1 con un connettore SUBD a 25 poli e per la COM2
con un connettore SUBD a 9 poli)
– segnali di triggeraggio e flash (connettore del cavo a nastro piatto a 10 poli)
e i LED per l’indicazione dello stato per 6
– la CPU (CFG)
– il processore Vision (ACA)
– l’entrata della videocamera (BCA)
– la visualizzazione dello schermo (DISP)
Troverete gli interruttori per il ’RESET’ e l’ ’ABORT’ sotto i LED indicatori. 6
6.2.2 Dati tecnici
Tipo di videocamera: SONY XC75 6
Numero di pixel: videocamera 768 (H) x 494 (V), immagine 640 (H) x 484 (V) 6
Campo visivo: 5,7 mm x 5,7 mm 6
Metodo di illuminazione: processo d’illuminazione dall’alto (viene attivato con il processo di6
misurazione) 6
Elaborazione immagine: principio di correlazione, sistema dei valori grigi 6
Schermo: monitor RGB (modo VGA) 640 x 484 pixel del computer di stazione6
Fiducial della scheda: memoria ad archivio per massimo 255 definizioni di fiducial 6
6.2.3 Descrizione del funzionamento
Prima del montaggio vengono determinate dal Visionsystem CS posizione, angolo di torsione e
deformazione di taglio del circuito stampato in base alle posizioni delle fiducial della scheda. Le
differenze rispetto ai valori di riferimento verranno calcolate come correzioni delle posizioni di
montaggio dei componenti. 6
Su un circuito stampato devono essere trasferite almeno 2 fiducial di scheda, in modo tale che il
sistema riesca a riconoscere le differenze rispetto alla posizione del CS e rispetto all’angolo di ro-
tazione del CS. Applicando 3 fiducial di scheda otterrete inoltre informazioni riguardo compres-
sioni e deformazioni del circuito stampato e del tracciato di tale circuito. 6