OPE-SFABCC-001S0SmartFAB搬运单元(带切割&弯脚功能)操作手册.pdf - 第10页
1.概要 OPE-SFABCC-001S0 搬运单元 ( 带切割&弯脚功能 ) 操作手册 8 2 . 手动操作 2.1. 操作搬运轨道 从 [ 手动操作 ] 功能菜单按下 [ 搬运轨道操作 ] 按钮的话,显示出搬运 轨道手动操作画面。 图 2.1 搬运轨道手动操作画面 画面说明 按键 说明 [ 原点复位 ] 搬运轨道与搬运臂、搬运单元工作头原点复位 。 [ 确认有无工件 ] 进行有无工件的确认 。 [ 搬入工件 ] 进行搬入工件的动作 …
1.概要
OPE-SFABCC-001S0
搬运单元(带切割&弯脚功能)
操作手册
6
1.概要
这个搬运单元通过搬运轨道搬入搬出工件,外加夹紧、松开功能具备下面的机构及功能。
(1)是在位于搬运轨道之间的区域内具备前后左右动作的搬运单元工作头。
使该搬运单元工作头动作具有切断插入元件的导线前端后弯曲的功能。
(2)在压入贴装元件时(在 L/R 工作头上加上载荷插入元件),也可使用备份功能。
从工件背面按压住搬运单元工作头防止工件"弯曲"。
(3)可以在工件上进行安装元件的插入检查。确认是否插入左右的导线。
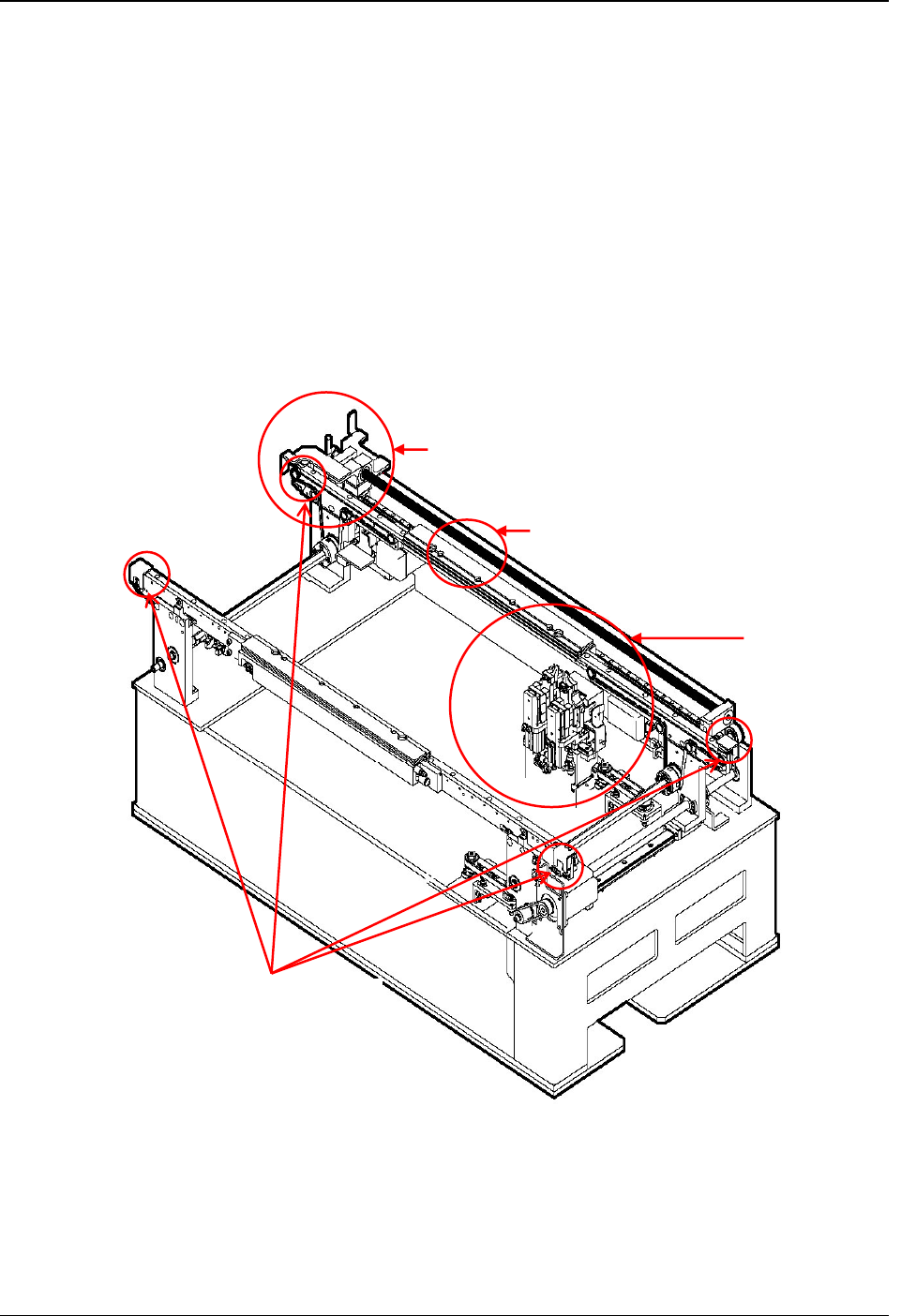
图 1. 带切割&弯脚功能的搬运轨道外观图
正面
背面
搬运单元工作头
搬运臂
从属轨道
工件通过确认传感器
OvlSLqSq
OvlSLqSq
Downloaded at 2015/10/08 22:10:627 by 3NEC4804 DL#BKUqoOif
1.概要
OPE-SFABCC-001S0
搬运单元(带切割&弯脚功能)
操作手册
8
2.手动操作
2.1.操作搬运轨道
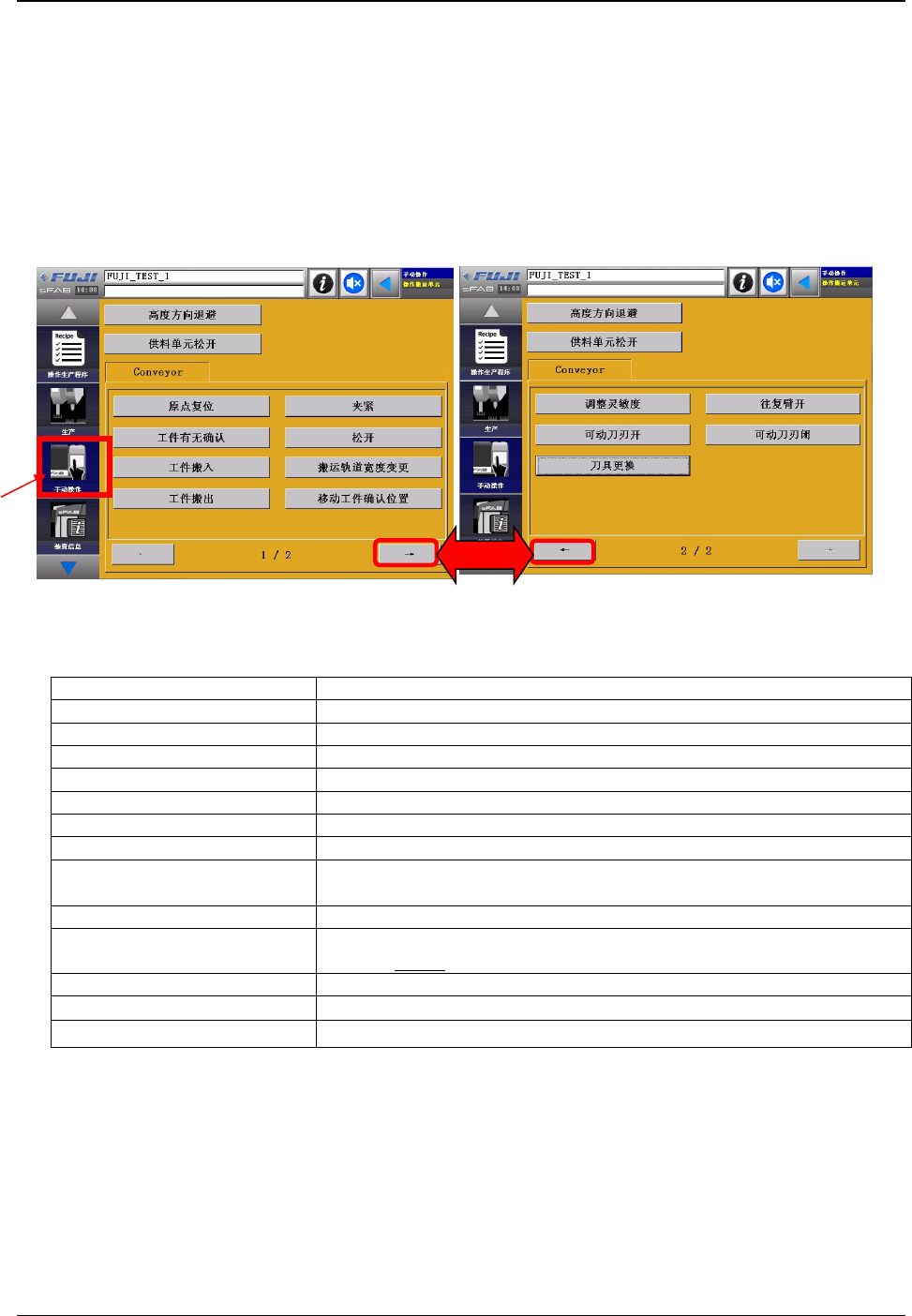
从[手动操作]功能菜单按下[搬运轨道操作]按钮的话,显示出搬运轨道手动操作画面。
图 2.1 搬运轨道手动操作画面
画面说明
按键 说明
[原点复位] 搬运轨道与搬运臂、搬运单元工作头原点复位。
[确认有无工件] 进行有无工件的确认。
[搬入工件] 进行搬入工件的动作。
[搬出工件] 进行搬出工件的动作。
[夹紧] 进行工件的夹紧。
[松开] 进行工件的松开。
[搬运轨道宽度变更] 可以变更搬运轨道的宽度。
[移动到工件确认位置] 将工件移动到「工件确认时的确认位置」。
在[机器功能设定]画面上可以指定工件确认位置与工作头待机位置。
[调整灵敏度] 进行工件通过确认传感器灵敏度的自动调整。
[刀具更换] 显示出搬运单元工作头的 [刀具更换]画面。
请参照「2.1.1 刀具更换」
[搬运臂开] 搬运单元的搬运臂在被覆盖的状态下旋转移动。
[打开可动刀片] 打开搬运单元工作头的可动刀片。
[关闭可动刀片] 关闭搬运单元工作头的可动刀片。
OvlSLqSq
OvlSLqSq
Downloaded at 2015/10/08 22:10:627 by 3NEC4804 DL#BKUqoOif
1.概要
OPE-SFABCC-001S0
搬运单元(带切割&弯脚功能)
操作手册
9
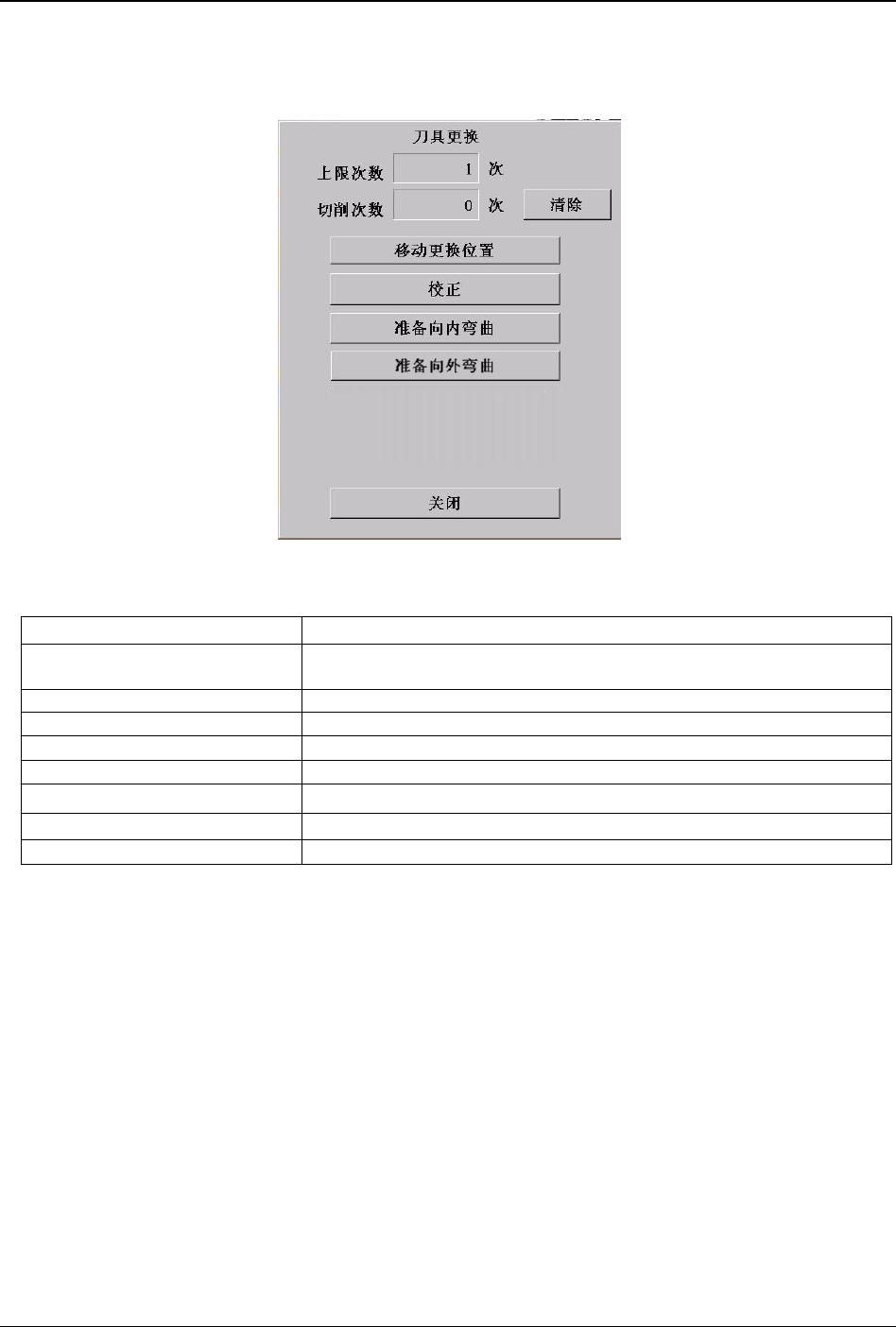
2.1.1. 刀具更换
按下[更换刀具],显示出以下画面。
图 2.2 [刀具更换]画面
画面说明
按键/注释 说明
上限次数 显示用搬运单元工作头的刀具切割引脚线的上限次数。切割引脚线次数超过
上限次数时显示警告。
切割次数 显示搬运单元工作头的累计切割次数。
[清除] 累计切割次数清零。
[移动到更换位置] 将搬运单元工作头移动到更换位置上待机。
[校正] 在搬运单元工作头完成刀具更换后进行校正。
[打开可动刀片] 打开搬运单元工作头的可动刀片。
[关闭可动刀片] 关闭搬运单元工作头的可动刀片。
[关闭] 关闭该画面。
OvlSLqSq
OvlSLqSq
Downloaded at 2015/10/08 22:10:627 by 3NEC4804 DL#BKUqoOif