OPE-SFABCC-001S0SmartFAB搬运单元(带切割&弯脚功能)操作手册.pdf - 第11页
1.概要 OPE-SFABCC-001S0 搬运单元 ( 带切割&弯脚功能 ) 操作手册 9 2.1.1. 刀具更换 按下 [ 更换刀具 ] ,显示出以下画面 。 图 2.2 [ 刀具更换 ] 画面 画面说明 按键 / 注释 说明 上限次数 显示用搬运单元工作头的刀具切割引脚线的上限次数 。 切割引脚线次数超过 上限次数时显示警告 。 切割次数 显示搬运单元工作头的累计切割次数 。 [ 清除 ] 累计切割次数清零 。 [ 移动到更换位置…
1.概要
OPE-SFABCC-001S0
搬运单元(带切割&弯脚功能)
操作手册
8
2.手动操作
2.1.操作搬运轨道
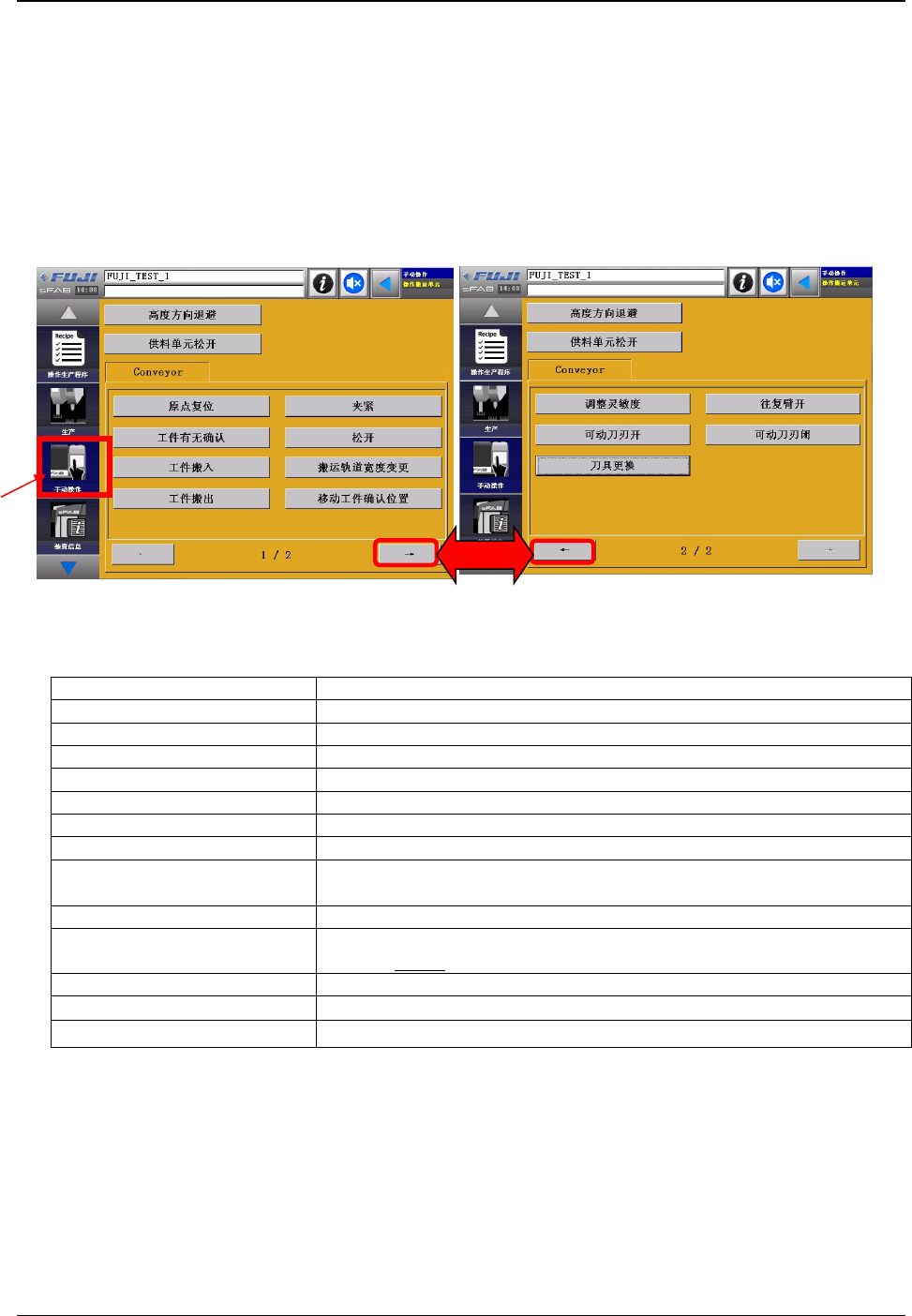
从[手动操作]功能菜单按下[搬运轨道操作]按钮的话,显示出搬运轨道手动操作画面。
图 2.1 搬运轨道手动操作画面
画面说明
按键 说明
[原点复位] 搬运轨道与搬运臂、搬运单元工作头原点复位。
[确认有无工件] 进行有无工件的确认。
[搬入工件] 进行搬入工件的动作。
[搬出工件] 进行搬出工件的动作。
[夹紧] 进行工件的夹紧。
[松开] 进行工件的松开。
[搬运轨道宽度变更] 可以变更搬运轨道的宽度。
[移动到工件确认位置] 将工件移动到「工件确认时的确认位置」。
在[机器功能设定]画面上可以指定工件确认位置与工作头待机位置。
[调整灵敏度] 进行工件通过确认传感器灵敏度的自动调整。
[刀具更换] 显示出搬运单元工作头的 [刀具更换]画面。
请参照「2.1.1 刀具更换」
[搬运臂开] 搬运单元的搬运臂在被覆盖的状态下旋转移动。
[打开可动刀片] 打开搬运单元工作头的可动刀片。
[关闭可动刀片] 关闭搬运单元工作头的可动刀片。
OvlSLqSq
OvlSLqSq
Downloaded at 2015/10/08 22:10:627 by 3NEC4804 DL#BKUqoOif
1.概要
OPE-SFABCC-001S0
搬运单元(带切割&弯脚功能)
操作手册
9
2.1.1. 刀具更换
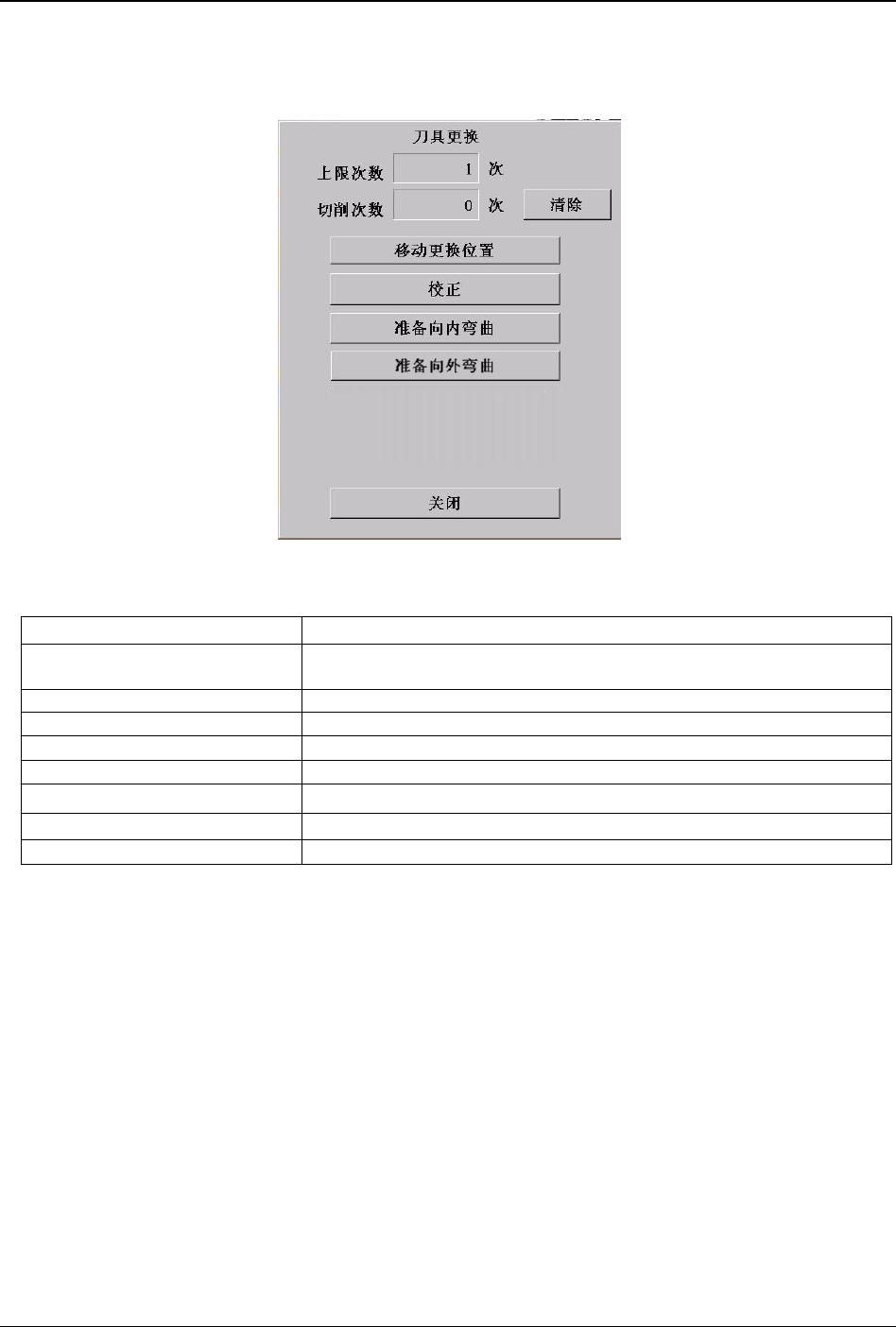
按下[更换刀具],显示出以下画面。
图 2.2 [刀具更换]画面
画面说明
按键/注释 说明
上限次数 显示用搬运单元工作头的刀具切割引脚线的上限次数。切割引脚线次数超过
上限次数时显示警告。
切割次数 显示搬运单元工作头的累计切割次数。
[清除] 累计切割次数清零。
[移动到更换位置] 将搬运单元工作头移动到更换位置上待机。
[校正] 在搬运单元工作头完成刀具更换后进行校正。
[打开可动刀片] 打开搬运单元工作头的可动刀片。
[关闭可动刀片] 关闭搬运单元工作头的可动刀片。
[关闭] 关闭该画面。
OvlSLqSq
OvlSLqSq
Downloaded at 2015/10/08 22:10:627 by 3NEC4804 DL#BKUqoOif
1.概要
OPE-SFABCC-001S0
搬运单元(带切割&弯脚功能)
操作手册
1
0
2.2. 进行 JOG 操作
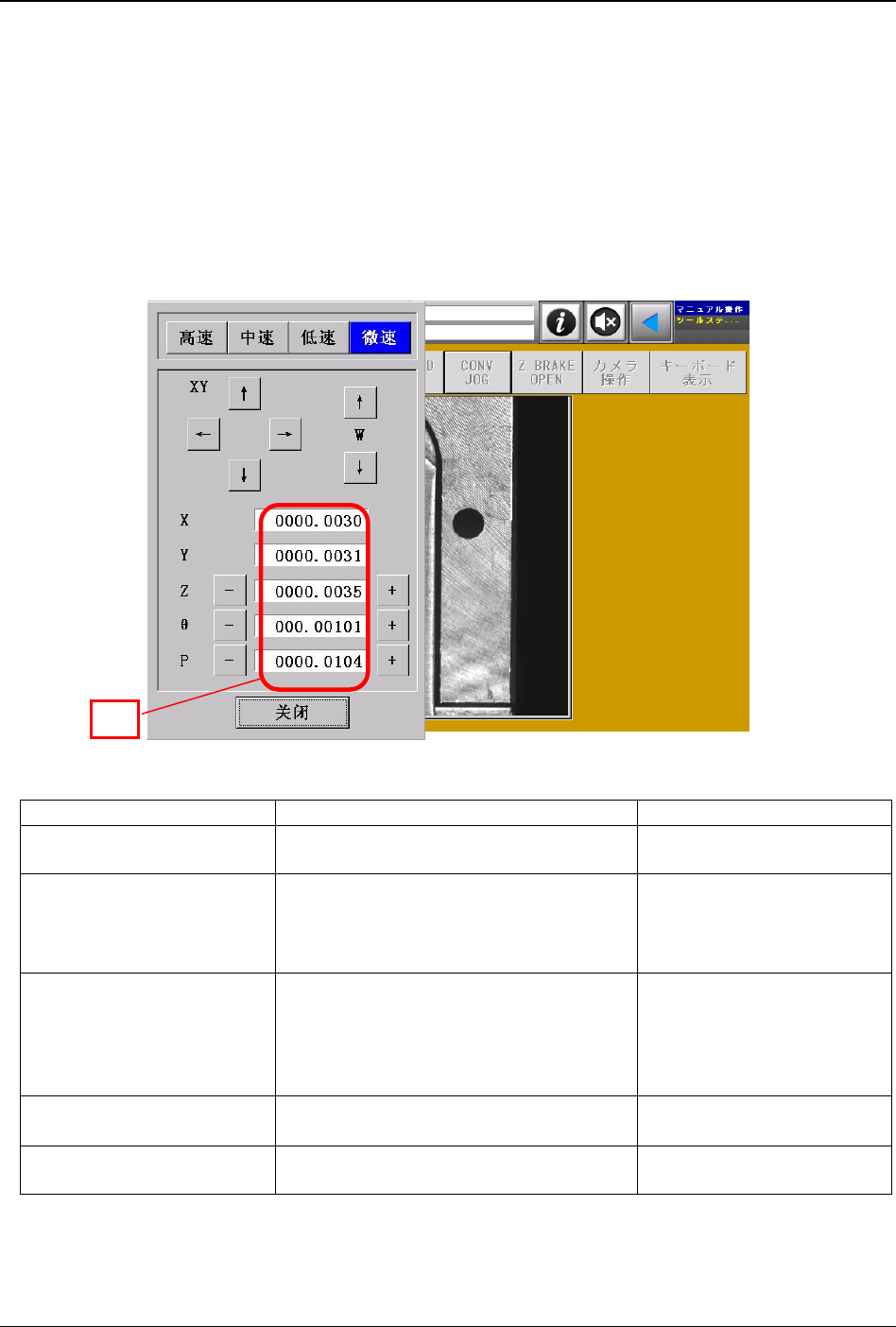
在[手动操作]功能菜单上按下[JOG 操作]的话,显示出 JOG 操作用画面。
选择在此画面上显示的[CONV JOG]能进行 JOG 操作。
2.2.1.进行搬运轨道的 JOG 操作
在搬运单元的固有值设定的软极限的范围内动作。
图 2.4 CONV JOG 操作画面
画面说明
按键 说明 备注
[高速][中速][低速][微速] 选择移动速度。
「X」「Y」
「Z」「θ」「P」
显示出 X 轴、Y 轴、Z 轴、θ 轴、P 轴的
当前位置。
X 轴、Y 轴、Z 轴、P 轴的单位是【mm】。
θ 的单位是【度】。
※请从「图 2.4 X 轴的说明」
参照「图 2.9 W 轴的说明」
的说明图。
「X 」:[←] [→]
「Y 」:[↑][↓]
「Z 」:[-][+]
「θ」:[-][+]
「P 」:[-][+]
通过搬运轨道坐标设定各移动位置。 在①中显示出当前的位置。
「W」:[↑][↓]
通过搬运轨道坐标选择移动方向。
(从属轨道动作)
[关闭]
关闭 CONV JOG 操作画面。
①
OvlSLqSq
OvlSLqSq
Downloaded at 2015/10/08 22:10:627 by 3NEC4804 DL#BKUqoOif