00198171-02_Technical_Training_FSE_TX-Series_EN.pdf - 第119页
8 Control and Communication 8.1 Communication Complete Overview Technical Training FSE SIPLACE TX-Series 01/2018 119 8 Control and Communication 8.1 Communication Complete Overview 8.2 Machine Communication bus Overview …

7 Power Supply
Room for Your Sketches and Notes
118 Technical Training FSE SIPLACE TX-Series 01/2018
8 Control and Communication
8.1 Communication Complete Overview
Technical Training FSE SIPLACE TX-Series 01/2018 119
8 Control and Communication
8.1 Communication Complete Overview
8.2 Machine Communication bus Overview
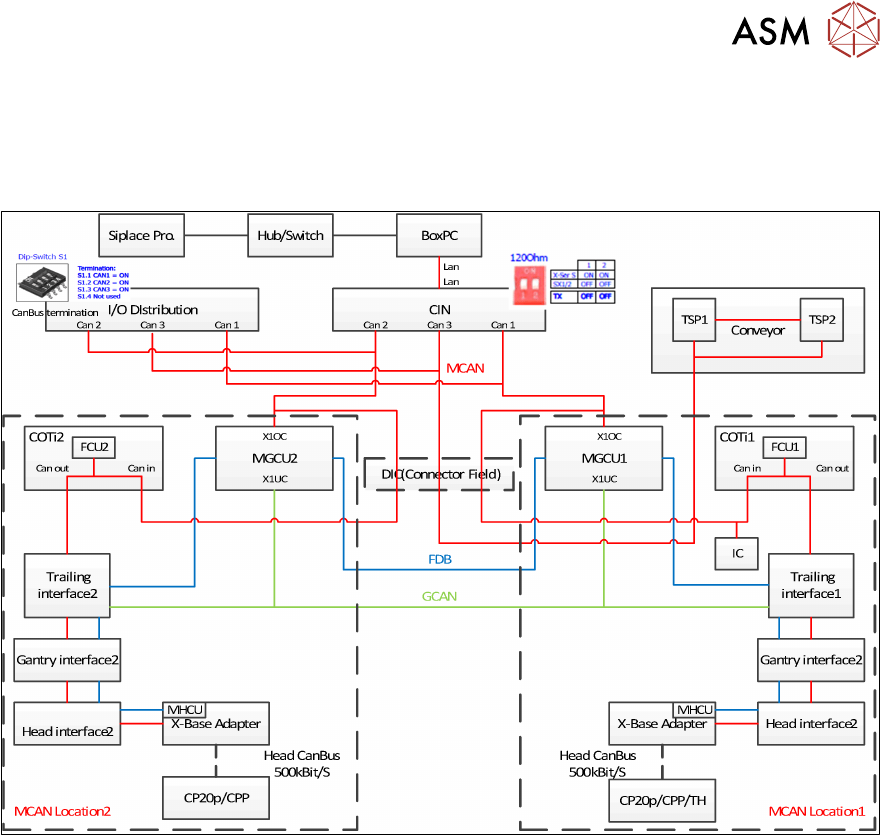
The TX machine is using three different bus systems:
MCAN (Machine CAN bus)
The MCAN-bus is responsible for the communication between the Box PC and the different sub-
systems within the machine.
GCAN (Gantry CAN bus)
The GCAN-bus is responsible for the communication between the gantry control unit´s (MGCU´s)
and the head control unit´s (MHCU´s) (e.g. Head-CAN-Diagnostics or SIRIO-Communication).
FDB GCU (Fast Drive bus GCU)
The Fast Drive bus GCU is a straight connection between the two GCU´s which are responsible for
the gantry synchronization (anti crash).
8 Control and Communication
8.2 Machine Communication bus Overview
120 Technical Training FSE SIPLACE TX-Series 01/2018
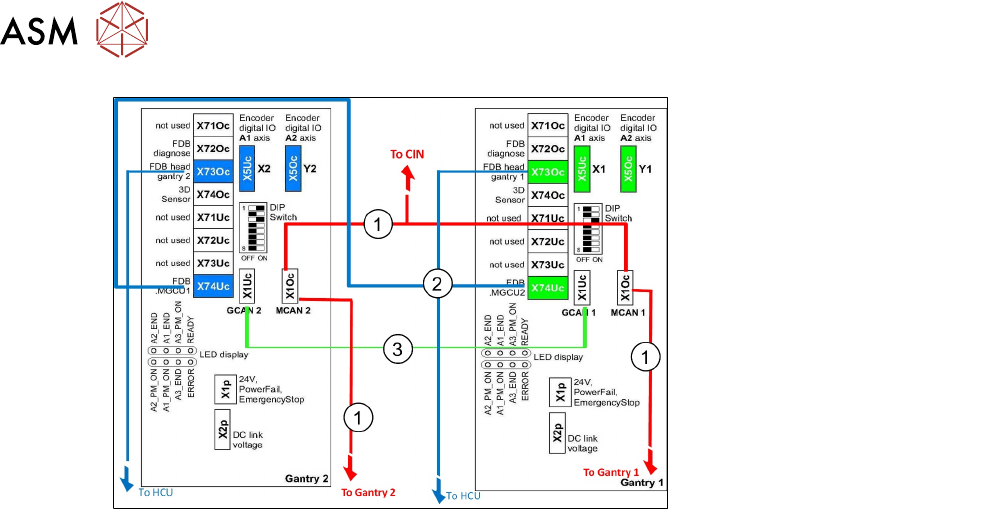
1. MCAN (Machine CAN bus)
2. Fast Drive bus (FDB)
3. GCAN (Gantry CAN bus)
and also to training –inter-
face 1/2
MCAN (Machine CAN bus)
TX machines run with three separate CAN bus loops (CAN1 / CAN2 /CAN3).
The CAN bus runs with a speed of 1 MBit/s.
The CAN Interface (CIN) (instead of CAN card of the Box-PC) serves as a interface to BoxPC /
SIRIO.