M3plus_OperationManual_j.pdf - 第224页
B- 11 認 識 辞 典 B 2.2.4 マーク型認識モード マーク型認識にはいくつかのアルゴリズムが用意されています。 1. 補正タイプ:マーク (1 つの部分からなる部品) 右図のような形状が 1 つの部分からなる部品を認識するアルゴリズムです。 不定形の部品を認識する場合に用います。部品の中心は重心位置、傾きは主軸の傾きとして求め られます。従って円 / 正方形などの場合は傾きは求められません。 ( 主軸が存在しないため ) C…

B-10
認
識
辞
典
B
2.2 特殊認識設定を使う
通常の補正タイプでは認識できない場合に、特殊認識アルゴリズムを使って認識します。その設定
方法について説明します。
2.2.1 QFP 認識モード
QFP 認識モードにはいくつかの特殊認識アリゴリズムが用意されています。
1. アルゴリズム:特殊 1 (特殊 QFP 認識 1)
端リード検出が安定しない場合にこのモードに設定すると安定する場合があります。
2. アルゴリズム:特殊 2 (特殊 QFP 認識 2)
特殊 QFP 認識 1 で横方向のリードのみを使って認識を行うモードです。
3. アルゴリズム:特殊 3 (特殊 QFP 認識 3)
特殊 QFP 認識 1 で縦方向のリードのみを使って認識を行うモードです。
4. アルゴリズム:特殊 4 (リード長さチェック機能付き QFP 認識)
通常の QFP 認識にリード長さのチェック機能を追加したモードです。リード先端に当てはめた直
線と各リード先端の距離が指定された距離以下であることをチェックします。この割合は認識オ
プション 3 に 1/100 mm 単位の値として設定します。設定できる値は 0 ∼ 127 (0.01 ∼ 1.27
mm) です。
2.2.2 単一コネクタ認識モード
コネクタ認識モードにはいくつかの特殊認識アリゴリズムが用意されています。
1. アルゴリズム:特殊 1 (特殊コネクタ認識 1)
端リード検出が安定しない場合にこのモードに設定すると安定する場合があります。
2. アルゴリズム:特殊 2 (ロングコネクタ外縁部のみ認識)
コネクタの両側の複数リードのみを使って認識するモードです。
3. 補正タイプ:異形コネクタ
単一方向のみのコネクタ(コネクタ E)に対して、リードが欠落している部分のあるコネクタを認識
します。認識方法は単一方向コネクタと同様です。
2.2.3 4 方向コネクタ認識モード(コネクタ NSEW)
4 方向コネクタ認識モードにはいくつかの特殊認識アリゴリズムが用意されています。
1. アルゴリズム:特殊 1 (特殊コネクタ認識 1)
端リード検出が安定しない場合にこのモードに設定すると安定する場合があります。
2. アルゴリズム:特殊 2 (ロングコネクタ外縁部のみ認識)
コネクタの両側の複数リードのみを使って認識するモードです。認識オプション 2 に両端の検出
するリード数を設定します。
3. 補正タイプ:リード欠落
4 方向コネクタ(コネクタ NSEW)に対して、リードが欠落している部分のある部品を認識します。
認識方法は 4 方向コネクタと同様です。
B-11
認
識
辞
典
B
2.2.4 マーク型認識モード
マーク型認識にはいくつかのアルゴリズムが用意されています。
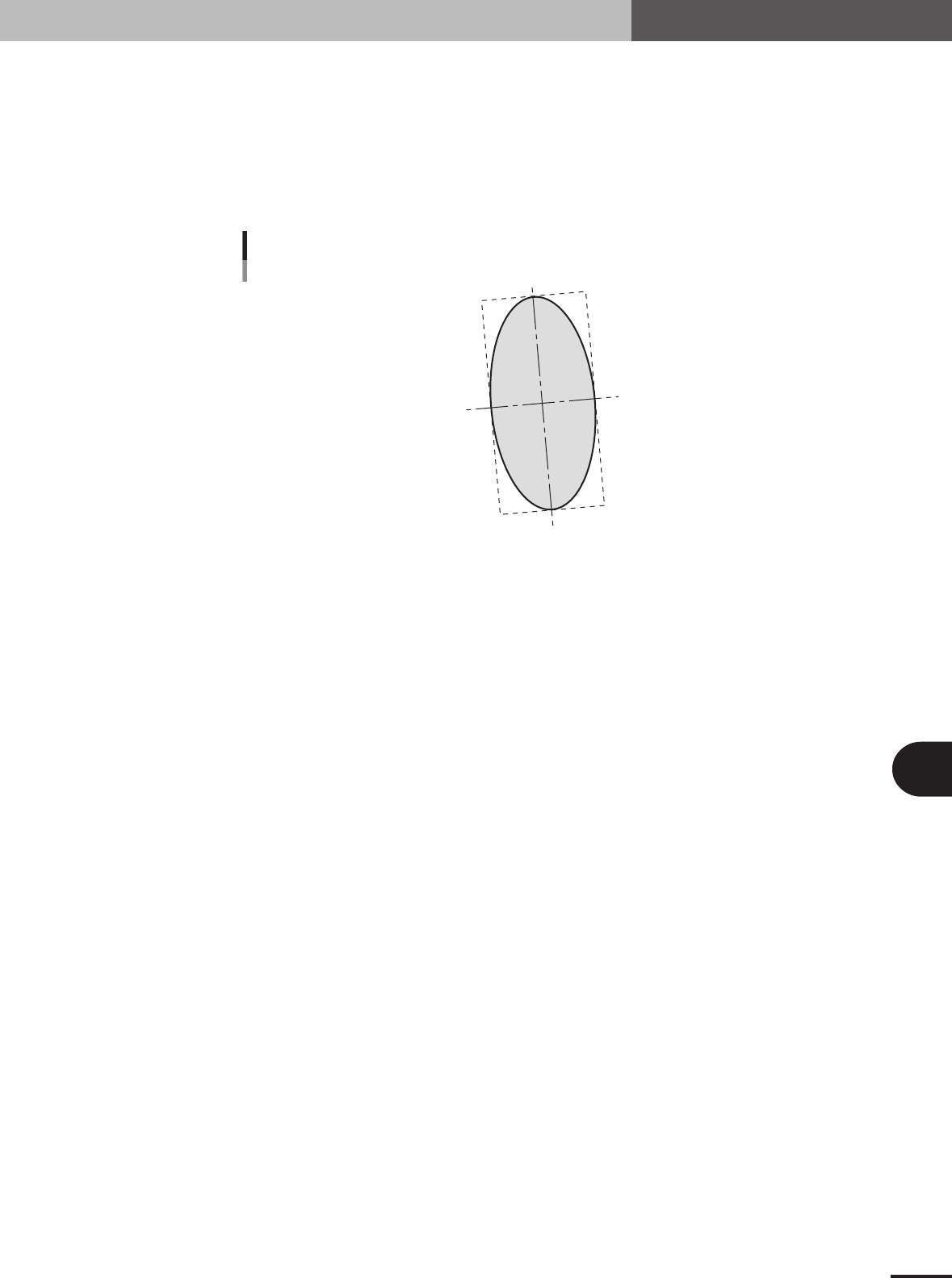
1. 補正タイプ:マーク (1 つの部分からなる部品)
右図のような形状が 1 つの部分からなる部品を認識するアルゴリズムです。
不定形の部品を認識する場合に用います。部品の中心は重心位置、傾きは主軸の傾きとして求め
られます。従って円 / 正方形などの場合は傾きは求められません。(主軸が存在しないため)
C
補正タイプ:マーク
22B02-E0-10
■ マーク型部品
補正グループ 特殊部品
補正タイプ マーク
部品しきい値 2 値化レベルを設定します。(0 なら自動で 2 値化レベ
ルを設定します。)
公差 形状公差を指定します。
リード検出範囲 検出の範囲を設定します。
外形寸法 X mm 外形サイズを設定します
外形寸法 Y mm 外形サイズを設定します
部品厚さ mm 外形サイズを設定します
部品表面タイプ 反射部品 / 非反射部品から選択します部品が白く見え
ていれば反射、そうでなければ非反射を選択します
部品外ノイズカット数 0 ∼ 7 から選択します
部品内ノイズカット数 0 ∼ 7 から選択します
ノイズカット優先順 部品内優先 / 部品外優先から選択します
B-12
認
識
辞
典
B
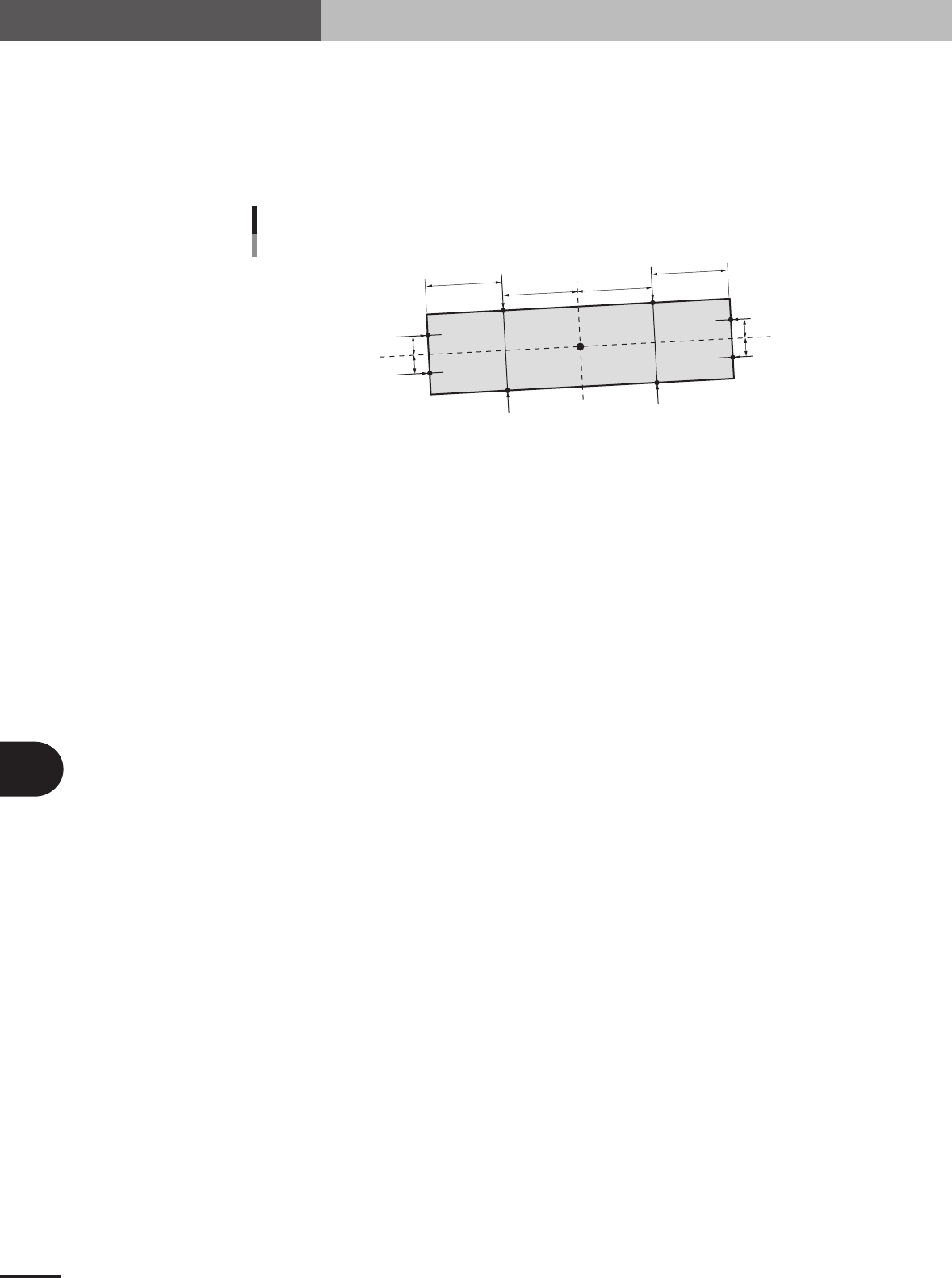
2. アルゴリズム:特殊 1 (形状が 1 つの部品)
部品の中心および傾きはいくつかの直線を使って検出します。
部品の概略の重心および傾きを特徴量として求めます。これを元に直線 1、2 を設定してその直線
上でエッジ位置 P1 ∼ P4 を求めます。P1 と P2 の中点と、P3 と P4 の中点を結んだ直線 3 の傾
きを部品の 傾きとします。さらに、直線 3 に平行な直線 5,6,7,8 を設定しエッジ位置 P5 ∼
P8 を求めます。これらを平均して部品中心を求めます。
P1
P7
P8
P5
P6
P2
G
P3
P4
直線3
直線4
直線1
直線2
直線7
直線8
直線5
直線6
マーク:特殊1
22B03-E0-10
■ 特殊部品 (特殊形状:マーク型)
補正グループ 特殊部品
補正タイプ 特殊形状
部品しきい値 2 値化レベルを設定します。(0 なら自動で 2 値化レベ
ルを設定します。)
公差 形状公差を指定します。
リード検出範囲 検出の範囲を設定します。
外形寸法 X 外形サイズを設定します
外形寸法 Y 外形サイズを設定します
部品厚さ 外形サイズを設定します
アルゴリズム 特殊 1
ベース補正タイプ マーク型
認識オプション 1 検出方向指定 0:自動 ,、1:左側 / 上側のみ、2:右
側/下側のみ、3:両側(自動の場合、部品がサーチ
枠にかかった方向は検出しません。)
認識オプション 2 0 に設定
認識オプション 3 0 に設定
認識オプション 4 部品内ノイズカット、部品外ノイズカットおよびこ
の実行順を指定します。ここには、n1:部品外ノイズ
カット値、n2:部品内ノイズカット値とすると
n2x8+n1 の値を設定します。実行順が、部品外→部
品内の場合はこの値から 128 を引いた値を設定しま
す
リードグループ W 0 に設定または 1 0 の場合は、重心から検出長の 1/
4 の位置に直線 1 が自動設定される。 また、検出幅
の 1/4 の位置に直線 7,8 が設定される。
リード本数 1W 0 に設定
反射リード長 1W mm 0 に設定
リード幅 1W mm 0 に設定
リードピッチ 1W mm 0 に設定
検出位置 X 1W mm リードグループ数 =1 の場合、輪郭位置からこの値だ
けオフセットした位置に直線 1 を設定する。
検出位置 Y 1W mm リードグループ数 =1 の場合、直線 3 からこの値だけ
オフセットした位置 に直線 7,8 を設定する。