TM3293.婎斅壓柺婎弨_愢柧帒椏.pdf - 第3页
ヤマハ発動機株式会社 IM 事業部 マウンター技術部 ソフト開発グループ MDOC-SOFT50139 3 2 2 2 2 設 定方法 設 定方法 設 定方法 設 定方法 この機能を使 用す る為の設 定方法は下 記の通りです。 …
ヤマハ発動機株式会社 IM 事業部
マウンター技術部 ソフト開発グループ
MDOC-SOFT50139
2
1
11
1
動作概要
動作概要動作概要
動作概要
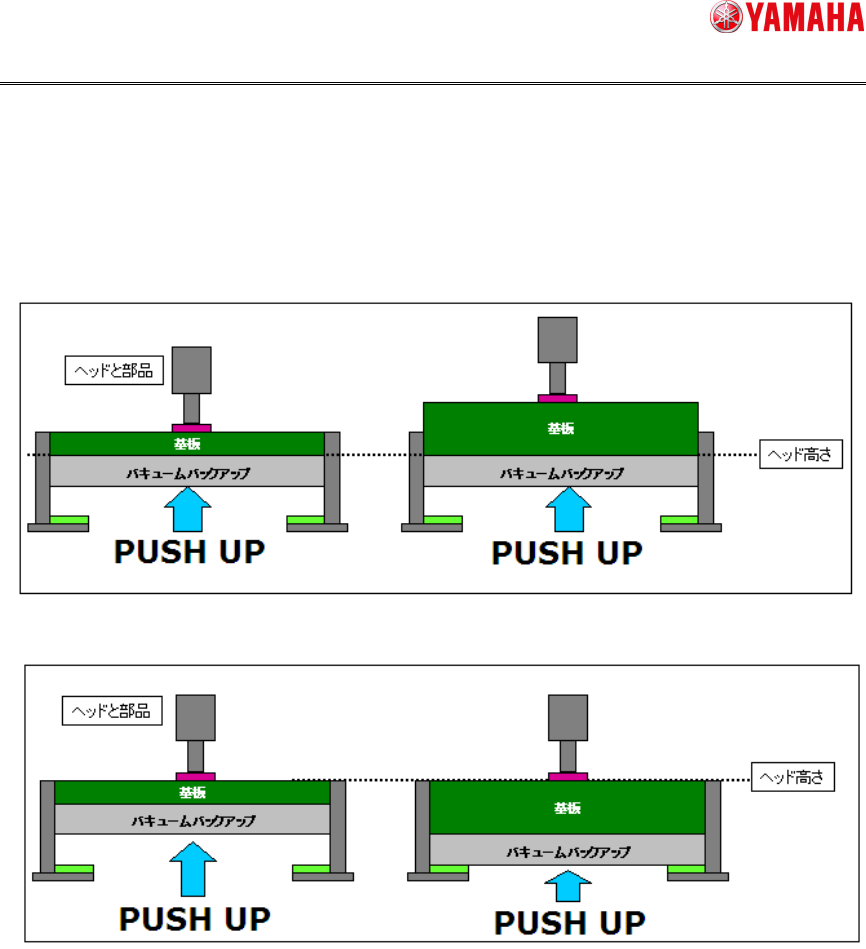
バキュームバックアップ使用時に、基板厚みを考慮した搭載高さで部品搭載を行う機能を追加し
ました(図 1.1)。 従来は搭載高さが一定の為、基板厚みが変わる度に、PUSH UP 軸位置を手動
調節し、辻褄を合わせる必要がありました(図 1.2)。 本機能から調整が不要になります。
図
1.1(
新機能
)
図
1.2(
従来機能
)
ヤマハ発動機株式会社 IM 事業部
マウンター技術部 ソフト開発グループ
MDOC-SOFT50139
3
2
22
2
設定方法
設定方法設定方法
設定方法
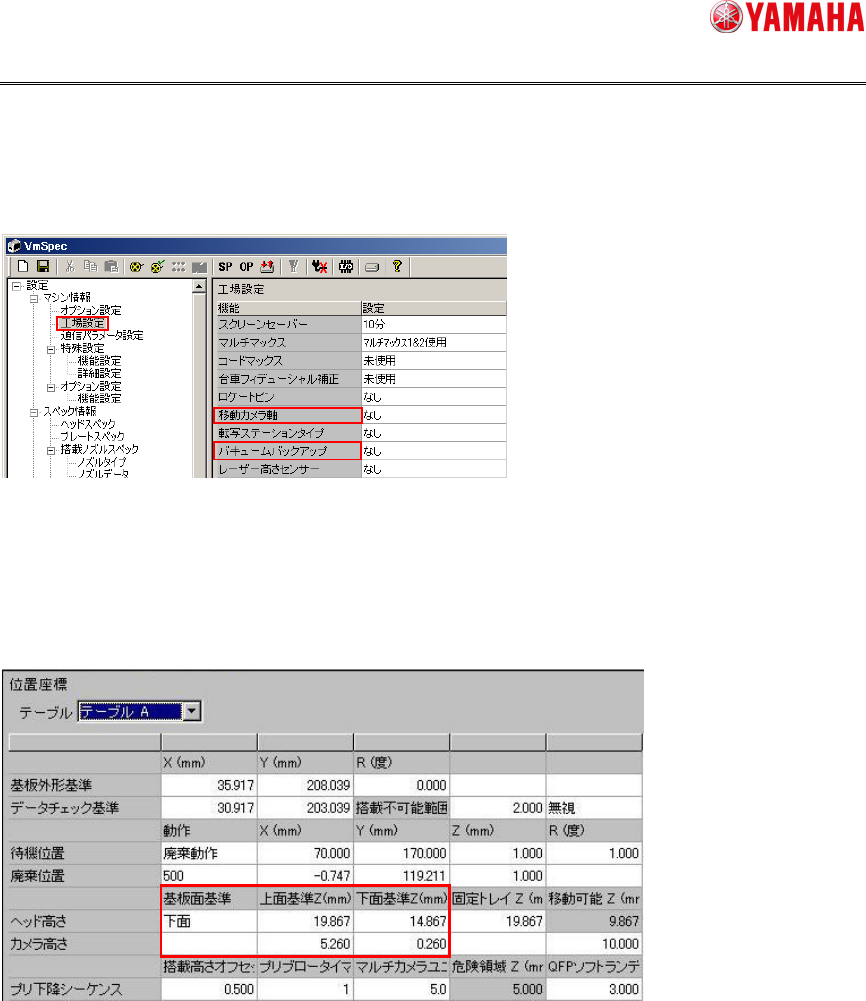
この機能を使用する為の設定方法は下記の通りです。
1) [設定]-[マシン情報]-[工場設定]-[移動カメラ軸] が 「あり」
2) [設定]-[マシン情報]-[工場設定]-[バキュームバックアップ] が 「なし」 以外
3) [設定]-[マシンデータ]-[機械座標]-[位置座標]-[ヘッド高さ]-[基板面基準] に
「上面」、もしくは 「下面」 の基準設定を行います。
「上面」 の場合は、以下の 4) のパラメータを使用します。
「下面」 の場合は、以下の 5) のパラメータを使用します
ヤマハ発動機株式会社 IM 事業部
マウンター技術部 ソフト開発グループ
MDOC-SOFT50139
4
4) [設定]-[マシンデータ]-[機械座標]-[位置座標]-[ヘッド高さ]-[上面基準 Z(mm)]
-[ヘッド高さ] がコンベア上面の Z 座標
-[カメラ高さ] がコンベア上面のカメラ認識座標
5) [設定]-[マシンデータ]-[機械座標]-[位置座標]-[ヘッド高さ]-[下面基準 Z(mm)]
-[ヘッド高さ] がプッシュアップ上昇時のバキュームバックアップ上面の Z 座標
-[カメラ高さ] がプッシュアップ上昇時のバキュームバックアップ上面のカメラ認識座標
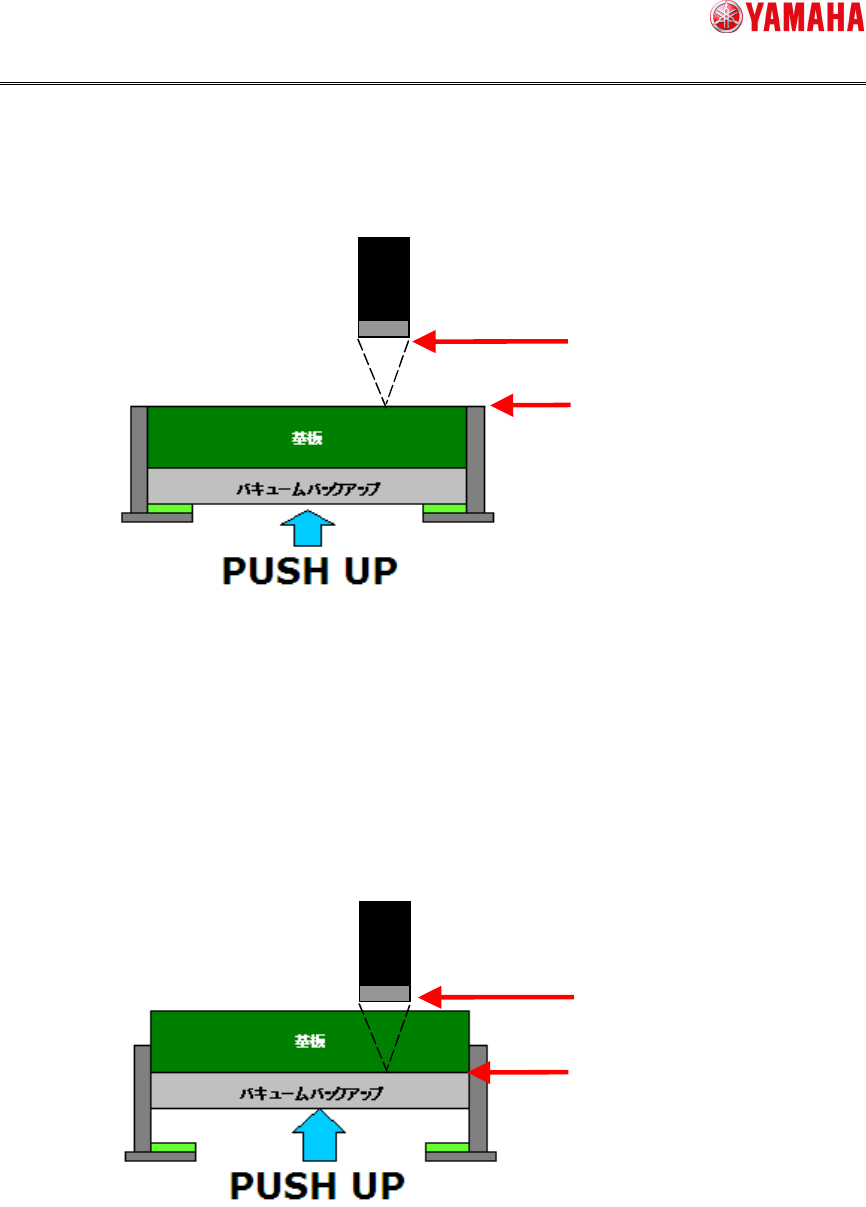
基板上面の位置が[ヘッド高さ]
[ヘッド高さ] を基準に、カメラの
ピントが合う位置が [カメラ高さ]
バキュームバックアップの上面が
[ヘッド高さ]
バキュームバックアップの上面を基準
に、カメラのピントが合う位置が[カメラ
高さ](※基板厚み 0mm の場合)