JUTZE AOI 向量说明.pdf - 第4页
JUTZE AOI 向量说明 方法一與方法二的差異: 方法一較為簡單且直觀,但是有一 缺點,從上圖 可得知,V7 為最大邊,所 以對於 中心點A(藍色):檢測框中心 點而言,需要 較大的搜索量 才能找到中心 點C(黑色 ):零件中心點。也因此,若當 白框距離檢測 框過近時,會 造成誤判。( 如下圖) 再者,方法二比較合乎邏輯,因為 先將檢測框校 正回原位置後 再去找零件位 置。
JUTZE AOI 向量说明
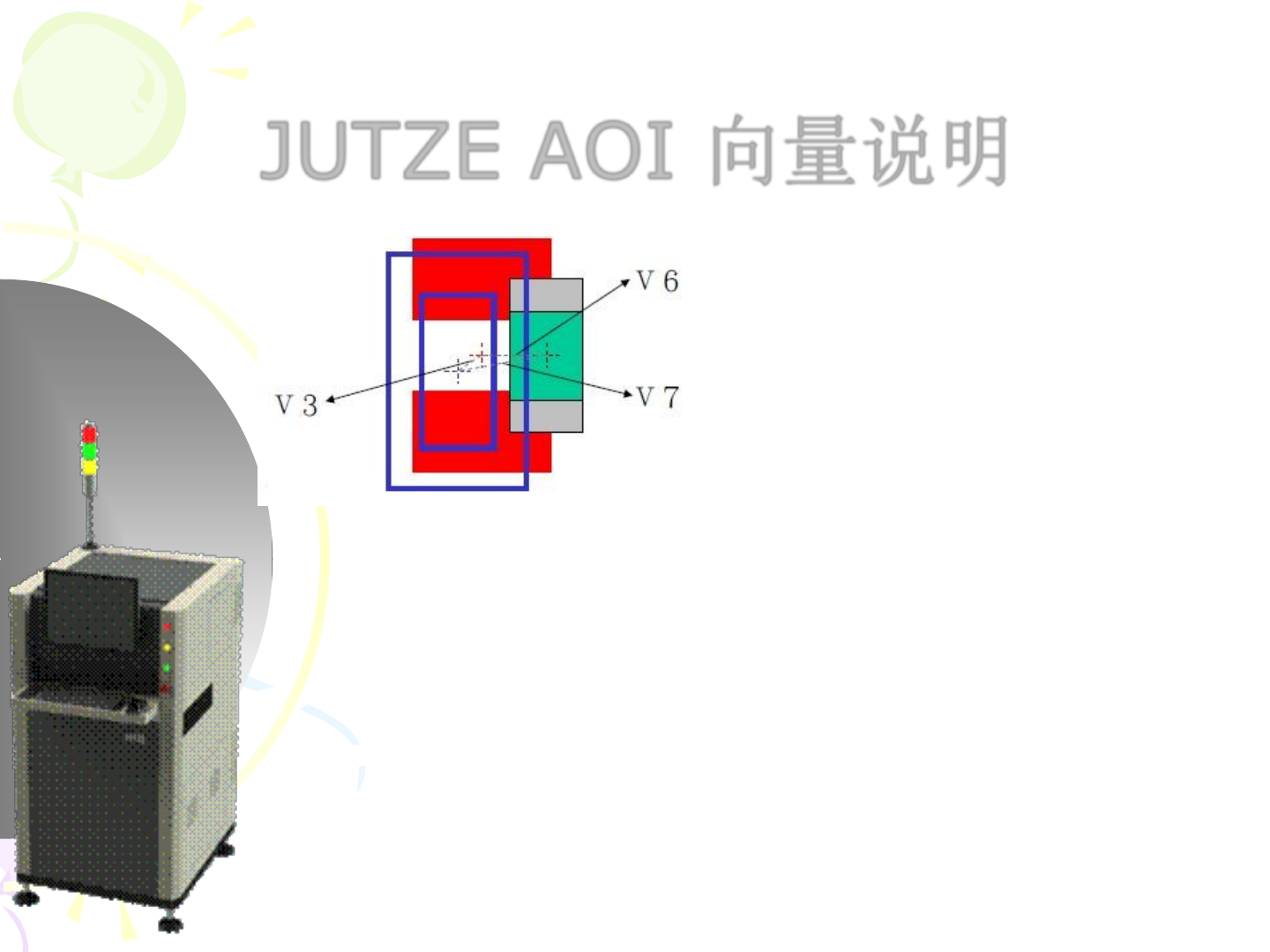
中心點A(藍色):檢測框中心點
中心點B(紅色):銅箔中心點
中心點C(黑色):零件中心點
方法二:
1,利用LTracking 或其他演算法得出點A(藍色)到點B(紅色)的Y偏移量,也就是V1。
2,利用WTracking 或其他演算法得出點A(藍色)到點B(紅色)的X偏移量,也就是V2。
3,利用演算法V1+V2得出點A(藍色)到點B(紅色)的二維偏移量,也就是V3。
V3:中心點A(藍色)“檢測框中心點“到中心點B(紅色)”銅箔中心點”的距離。
4,利用LTracking 或其他演算法先套上V1後再得出點B(紅色)到點C(黑色)的Y偏移
量,也就是V4。
5,利用WTracking 或其他演算法先套上V2後再得出點B(紅色)到點C(黑色)的X偏移
量,也就是V5。
6,利用演算法V1+V2得出點B(紅色)到點C(黑色)的二維偏移量,也就是V6。
7,再利用演算法V1+V2得出點A(藍色)到點C(黑色)的二維偏移量,也就是V7。
V7:中心點A(藍色)“檢測框中心點“到中心點C(黑色)”零件中心點”的距離;
也等於方法一的V6。
V3與V7是單獨且獨立的,可以分別套用在需要的時候;而V6無法直接套用。
JUTZE AOI 向量说明
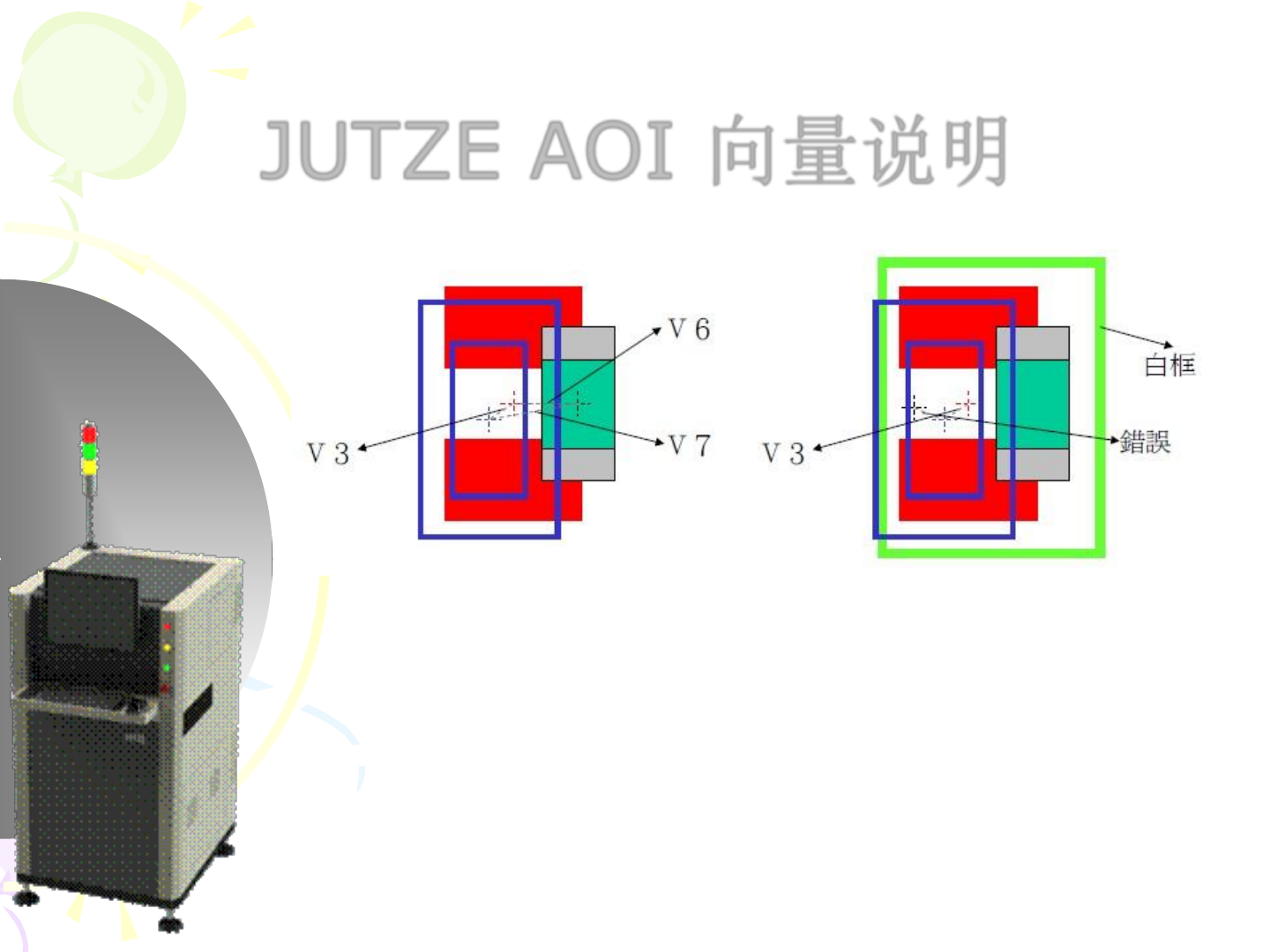
方法一與方法二的差異:
方法一較為簡單且直觀,但是有一缺點,從上圖可得知,V7為最大邊,所以對於
中心點A(藍色):檢測框中心點而言,需要較大的搜索量才能找到中心點C(黑色
):零件中心點。也因此,若當白框距離檢測框過近時,會造成誤判。(如下圖)
再者,方法二比較合乎邏輯,因為先將檢測框校正回原位置後再去找零件位置。

完