00193801-01.pdf - 第94页
3 Technische Daten Betriebsanleitung SIPLACE CF 3.9 Bestückk öpfe Softwareversion S R.101.xx Ausgabe 06/2003 D E 94 3.9.2.2 Beschreibung d es Pick&Place-Kop fes Der Pick& Place-Ko pf arbeitet na ch dem P ick&…
Betriebsanleitung SIPLACE CF 3 Technische Daten
Softwareversion SR.101.xx Ausgabe 06/2003 DE 3.9 Bestückköpfe
93
3.9.2 Pick&Place-Kopf
3.9.2.1 Aufbau
3
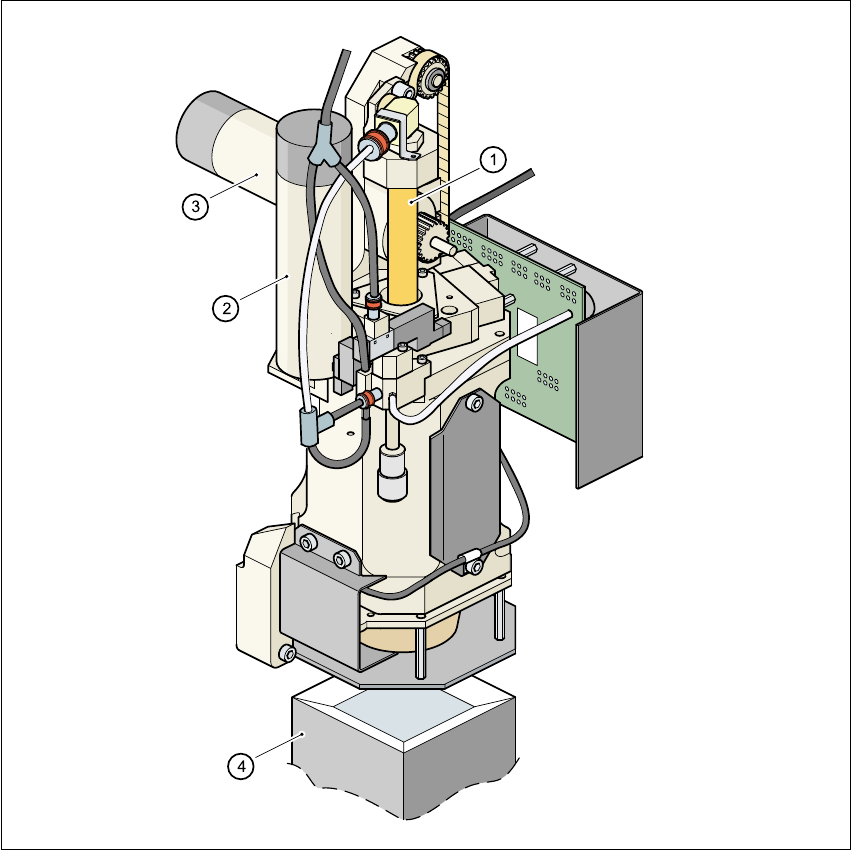
Abb. 3.9 - 3 Aufbau des Pick&Place-Kopfes
3
(1) Pinole
(2) DR-Achsenantrieb
(3) Z-Achsenantrieb
(4) Finepitch-Kamera
3 Technische Daten Betriebsanleitung SIPLACE CF
3.9 Bestückköpfe Softwareversion SR.101.xx Ausgabe 06/2003 DE
94
3.9.2.2 Beschreibung des Pick&Place-Kopfes
Der Pick&Place-Kopf arbeitet nach dem Pick&Place-Prinzip. Danach wird ein Bauelement mit
Hilfe eines Vakuums von der Pipette aufgenommen. Nach der optischen Zentrierung mit dem
Finepitch-Visionmodul wird das Bauelement in die Bestücklage gedreht und mit hoher Präzision
auf die Leiterplatte bestückt. Der Pick&Place-Kopf zeichnet sich insbesondere durch seine hohe
Winkelgenauigkeit aus.
3.9.2.3 Technische Daten - Pick&Place-Kopf
3
Bauelementespektrum PLCC, LCCC, QFP, SO, BGA, Flip-Chip,
BE mit Anschlüssen bis 55 mm x 55 mm
(J-Leads und Gullwings, Balls, Bumps)
BE-Spezifikation
max. Höhe BE-Höhe ≤ 13,5mm - LP-Dicke
- LP-Durchbiegung
Option:
BE-Höhe ≤ 20mm - LP-Dicke
- LP-Durchbiegung
min. Beinchenraster 0,4mm
min. Bumpraster 0,56 mm
min. Ball-/Bump-Durchmesser 0,32 mm
min. Abmessungen 1,6 mm x 0,8 mm
max. Abmessungen 55 mm x 55 mm (92 mm Kantenlänge auf Anfrage)
max. Gewicht 25 g
Programmierbare Aufsetzkraft 1 - 10 N
BE-Zentrierung Finepitch-Kamera
bis 32 mm x 32 mm mit Einfachmessung
bis 55 mm x 55 mm mit Vierfachmessung
Max. Bestückleistung 1.800 BE/h
Pipettentypen 4xx, 5 Standardpipetten mit Pipettenwechsler
Winkelgenauigkeit ± 0,07° / 4 σ
Bestückgenauigkeit ± 50 µm / 4 σ
Betriebsanleitung SIPLACE CF 3 Technische Daten
Softwareversion SR.101.xx Ausgabe 06/2003 DE 3.10 Visionmodule
95
3.10 Visionmodule
3.10.1 Beschreibung
Jeder Automat besitzt
– eine BE-Visionkamera am Collect&Place-Kopf,
– eine Finepitch-Visionkamera am Maschinenständer und
– eine LP-Visionkamera an der Portalunterseite der X-Achse.
Die Visionauswerteeinheit ist im Steuereinschub des Automaten untergebracht. Mit Hilfe des BE-
Visionmoduls wird
– die genaue Position des Bauelements an der Pipette und
– die Geometrie der Gehäuseform bestimmt.
Das LP-Visionmodul ermittelt mit Hilfe von Passmarken auf den LPs
– die Lage der Leiterplatte,
– ihren Verdrehwinkel
– und den Verzug der Leiterplatte.
Darüber hinaus ermittelt das LP-Visionmodul mit Hilfe von Passmarken auf den Förderern die
exakte Abholposition von Bauelementen. Dies ist insbesondere für kleine Bauelemente wichtig.